一种基于声表面波的电力设备裂纹定位追踪方法及系统
- 国知局
- 2024-08-22 15:07:13
本发明属于设备裂纹追踪的,具体地涉及一种基于声表面波的电力设备裂纹定位追踪方法及系统。
背景技术:
1、近年来,电力系统日益复杂化,电力设备的故障诊断成为保障电力稳定供应和系统安全的关键环节。电力设备的故障往往会导致经济损失,火灾甚至人员伤亡。因此及时发现故障位置,提前对设备进行检测,预防设备故障尤为重要。
2、目前,常使用人工智能方法诊断电力设备故障,神经网络方法能够自动学习图像特征,降低特征提取误差;模糊理论对电力设备系统的工作点和参数变化具有较高的鲁棒性;灰色系统理论利用模型评估系统部件的当前状态,并根据当前状态特征预测未来状态,有效提高故障早期发现能力;专家系统能够在一定程度上模拟专家经验及推理过程,较早且准确识别设备的异常和故障;案例推理利用已有经验知识解决难题,从已存在的案例历史中获取资料,具有方便快捷的优点。而在电力设备通常包含大量金属零件,在持续运行过程中,由于载荷作用会产生难以避免的损伤,这些损伤一般表现为裂纹、表面烧蚀以及材料磨损等,如果及时发现并处理这些损伤,能有效防止设备故障,从而避免安全损伤,如采用上述方法对电力设备进行裂纹检测,其裂纹缺陷定位所需时间较长且裂纹定位不够精准。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种基于声表面波的电力设备裂纹定位追踪方法及系统,用于解决现有技术中的技术问题。
2、一方面,本发明提供以下技术方案,一种基于声表面波的电力设备裂纹定位追踪方法,包括:
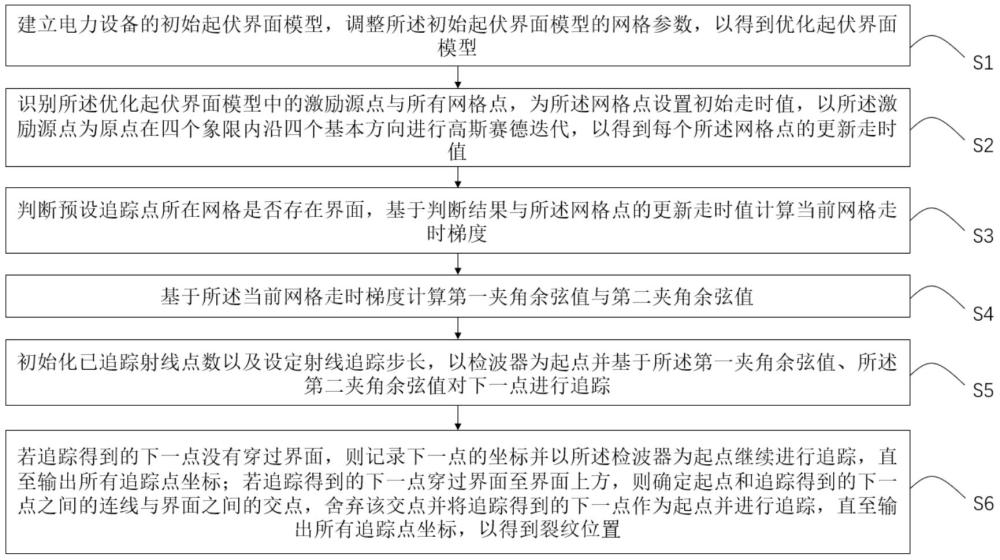
3、建立电力设备的初始起伏界面模型,调整所述初始起伏界面模型的网格参数,以得到优化起伏界面模型;
4、识别所述优化起伏界面模型中的激励源点与所有网格点,为所述网格点设置初始走时值,以所述激励源点为原点在四个象限内沿四个基本方向进行高斯赛德迭代,以得到每个所述网格点的更新走时值;
5、判断预设追踪点所在网格是否存在界面,基于判断结果与所述网格点的更新走时值计算当前网格走时梯度;
6、基于所述当前网格走时梯度计算第一夹角余弦值与第二夹角余弦值;
7、初始化已追踪射线点数以及设定射线追踪步长,以检波器为起点并基于所述第一夹角余弦值、所述第二夹角余弦值对下一点进行追踪;
8、若追踪得到的下一点没有穿过界面,则记录下一点的坐标并以所述检波器为起点继续进行追踪,直至输出所有追踪点坐标;若追踪得到的下一点穿过界面至界面上方,则确定起点和追踪得到的下一点之间的连线与界面之间的交点,舍弃该交点并将追踪得到的下一点作为起点并进行追踪,直至输出所有追踪点坐标,以得到裂纹位置。
9、相比现有技术,本发明的有益效果为:本发明首先建立电力设备的初始起伏界面模型,调整初始起伏界面模型的网格参数,以得到优化起伏界面模型;然后识别优化起伏界面模型中的激励源点与所有网格点,为网格点设置初始走时值,以激励源点为原点在四个象限内沿四个基本方向进行高斯赛德迭代,以得到每个网格点的更新走时值;然后判断预设追踪点所在网格是否存在界面,基于判断结果与网格点的更新走时值计算当前网格走时梯度:然后基于当前网格走时梯度计算第一夹角余弦值与第二夹角余弦值;然后初始化已追踪射线点数以及设定射线追踪步长,以检波器为起点并基于第一夹角余弦值、第二夹角余弦值对下一点进行追踪;最后若追踪得到的下一点没有穿过界面,则记录下一点的坐标并以检波器为起点继续进行追踪,直至输出所有追踪点坐标;若追踪得到的下一点穿过界面至界面上方,则确定起点和追踪得到的下一点之间的连线与界面之间的交点,舍弃该交点并将追踪得到的下一点作为起点并进行追踪,直至输出所有追踪点坐标,以得到裂纹位置,本发明采用快速追踪算法求解程函数方程,以提升计算效率进而提升裂纹定位的效率,同时也能够实现对裂纹缺陷的精准定位,及时发现设备损伤减少事故的发生。
10、较佳的,所述以所述激励源点为原点在四个象限内沿四个基本方向进行高斯赛德迭代,以得到每个所述网格点的更新走时值的步骤包括:
11、建立在2d各基本方向上的程函数方程:
12、;
13、式中,表示走时值,表示网格点在对应象限内的坐标,表示待求解区域,表示对应网格点的加速度;
14、对所述程函数方程进行离散化处理,以得到逆风差分方程:
15、;
16、;
17、;
18、式中,,,、、、、分别表示坐标为、、、、的网格点的走时值,表示x方向上左右两侧网格点的走时值最小值,表示z方向上上下两侧网格点的走时值最小值,表示坐标为的网格点的加速度,为步长因子;
19、在所述待求解区域的边界处对所述逆风差分方程使用一阶差分近似处理,以得到差分方程:
20、;
21、;
22、;
23、式中,、分别表示坐标为、的网格点的走时值;
24、求解所述差分方程的解析解,以得到每个所述网格点的更新走时值:
25、;
26、;
27、式中,为初始走时值。
28、较佳的,所述基于判断结果与所述网格点的更新走时值计算当前网格走时梯度的步骤包括:
29、若预设追踪点所在网格存在界面,则采用第一计算公式计算当前网格走时梯度:
30、;
31、式中,、分别x、z方向上的当前网格走时梯度,、、、分别表示预设追踪点所在网格的左上、右上、右下、左下网格点的更新走时值,为网格间距;
32、若预设追踪点所在网格不存在界面,则采用第一计算公式计算当前网格走时梯度:
33、;
34、式中,、表示界面与网格之间的交点、处的更新走时值,、分别表示预设追踪点下方网格中右下网格点、左下网格点的更新走时值,、分别表示点至点的距离、点至点的距离。
35、较佳的,在所述基于所述当前网格走时梯度计算第一夹角余弦值与第二夹角余弦值的步骤中,所述第一夹角余弦值与所述第二夹角余弦值分别为:
36、;
37、;
38、式中,、分别x、z方向上的当前网格走时梯度。
39、较佳的,所述以检波器为起点并基于所述第一夹角余弦值、所述第二夹角余弦值对下一点进行追踪的步骤包括:
40、采用第三预设公式以检波器为起点并基于所述第一夹角余弦值、所述第二夹角余弦值对下一点进行追踪,以得到下一点,所述第三预设公式为:
41、;
42、式中,表示以起点的射线追踪得到的下一点的坐标,表示起点坐标,表示射线追踪步长。
43、第二方面,本发明提供以下技术方案,一种基于声表面波的电力设备裂纹定位追踪系统,所述系统包括:
44、调整模块,用于建立电力设备的初始起伏界面模型,调整所述初始起伏界面模型的网格参数,以得到优化起伏界面模型;
45、更新模块,用于识别所述优化起伏界面模型中的激励源点与所有网格点,为所述网格点设置初始走时值,以所述激励源点为原点在四个象限内沿四个基本方向进行高斯赛德迭代,以得到每个所述网格点的更新走时值;
46、梯度模块,用于判断预设追踪点所在网格是否存在界面,基于判断结果与所述网格点的更新走时值计算当前网格走时梯度:
47、计算模块,用于基于所述当前网格走时梯度计算第一夹角余弦值与第二夹角余弦值;
48、追踪模块,用于初始化已追踪射线点数以及设定射线追踪步长,以检波器为起点并基于所述第一夹角余弦值、所述第二夹角余弦值对下一点进行追踪;
49、定位模块,用于若追踪得到的下一点没有穿过界面,则记录下一点的坐标并以所述检波器为起点继续进行追踪,直至输出所有追踪点坐标;若追踪得到的下一点穿过界面至界面上方,则确定起点和追踪得到的下一点之间的连线与界面之间的交点,舍弃该交点并将追踪得到的下一点作为起点并进行追踪,直至输出所有追踪点坐标,以得到裂纹位置。
50、较佳的,所述梯度模块包括:
51、第一梯度子模块,用于若预设追踪点所在网格存在界面,则采用第一计算公式计算当前网格走时梯度:
52、;
53、式中,、、、分别表示预设追踪点所在网格的左上、右上、右下、左下网格点的更新走时值,为网格间距;
54、第二梯度子模块,用于若预设追踪点所在网格不存在界面,则采用第一计算公式计算当前网格走时梯度:
55、;
56、式中,、表示界面与网格之间的交点、处的更新走时值,、分别表示预设追踪点下方网格中右下网格点、左下网格点的更新走时值,、分别表示点至点的距离、点至点的距离。
57、较佳的,所述追踪模块具体用于:
58、采用第三预设公式以检波器为起点并基于所述第一夹角余弦值、所述第二夹角余弦值对下一点进行追踪,以得到下一点:
59、;
60、式中,表示以起点的射线追踪得到的下一点的坐标,表示起点坐标,表示射线追踪步长。
61、第三方面,本发明提供以下技术方案,一种计算机,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述的基于声表面波的电力设备裂纹定位追踪方法。
62、第四方面,本发明提供以下技术方案,一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述的基于声表面波的电力设备裂纹定位追踪方法。
本文地址:https://www.jishuxx.com/zhuanli/20240822/281236.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表