一种梯级踢面啮合间隙分析方法、系统、设备及存储介质与流程
- 国知局
- 2024-08-22 15:08:01
本发明涉及自动扶梯,具体来说涉及一种梯级踢面啮合间隙分析方法、系统、设备及存储介质。
背景技术:
1、自动扶梯作为现代城市交通设施的重要组成部分,在改善人们的出行体验和城市交通效率方面发挥着重要作用。梯级是自动扶梯中至关重要的组成部分,其不仅是乘客上下行走的基础平台,还直接影响着自动扶梯的安全性、舒适性和稳定性。因此,在自动扶梯的设计和运行过程中,梯级的设计需要得到高度重视和精心把握。自动扶梯两个相邻梯级之间的啮合间隙是确保扶梯正常运行和乘客安全的重要因素之一。啮合间隙过小会导致扶梯的机械阻力增加,加速扶梯摩擦损坏;啮合间隙过大会导致能量浪费,扶梯稳定性差。
2、在工程应用中,经常需要在不同导轨、链条或倾角的自动扶梯上使用同一款梯级产品,因此必须要对同一个梯级踢面在多种使用条件下能否保持合适的啮合间隙进行准确分析。现有的自动扶梯梯级的踢面啮合间隙主要是依据行业标准和经验值进行设计。一方面,在设计时,会参考以往的案例和数据,尽量确保新设计的啮合间隙在安全可靠的范围内;另一方面,在设计完成后,自动扶梯会在实际应用中进行大量的测试和验证,通过实际使用反馈,不断优化和调整啮合间隙数据,为后续设计提供案例参考。
3、由于现有的踢面啮合间隙基于经验值和标准规范进行设计,很难提前预测和分析不同使用环境下啮合间隙的变化情况,如果出现设计偏差,后期将很难修正,导致出现经济损失和安全隐患。
技术实现思路
1、本发明的目的在于提供一种梯级踢面啮合间隙分析方法、系统、设备及存储介质,基于预设参数自动进行踢面啮合间隙计算,提前预测和分析不同使用环境下啮合间隙的变化情况,提高设计效率和精确度。
2、为实现上述目的,本发明公开了如下技术方案:
3、本发明一方面提供了一种梯级踢面啮合间隙分析方法,应用于自动扶梯,自动扶梯包括前后相邻的第一梯级和第二梯级,所述第一梯级位于两个梯级中的后侧,所述第二梯级位于两个梯级中的前侧,所述方法包括以下步骤:
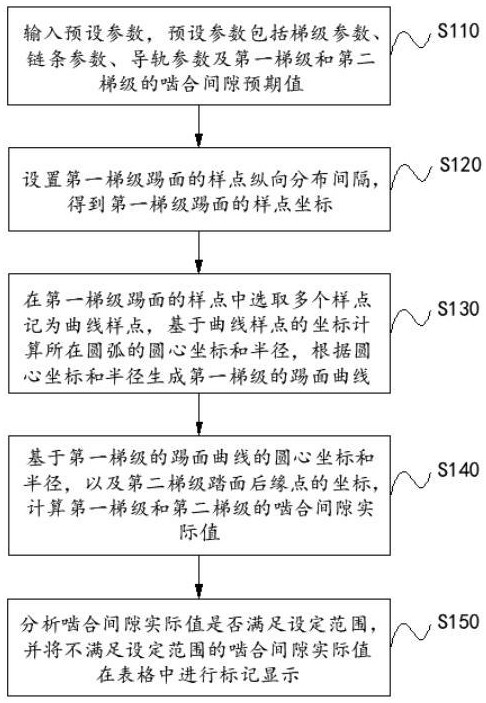
4、输入预设参数,所述预设参数包括梯级参数、链条参数、导轨参数及所述第一梯级和所述第二梯级的啮合间隙预期值;
5、设置第一梯级踢面的样点纵向分布间隔,得到第一梯级踢面的样点坐标;
6、在所述第一梯级踢面的样点中选取多个样点记为曲线样点,并基于所述曲线样点的坐标计算其所在圆弧的圆心坐标和半径,根据所述圆心坐标和所述半径生成第一梯级的踢面曲线;
7、基于所述第一梯级的踢面曲线的圆心坐标和半径,以及第二梯级踏面后缘点的坐标,计算所述第一梯级和所述第二梯级的啮合间隙实际值;
8、分析所述啮合间隙实际值是否满足设定范围,并将不满足设定范围的啮合间隙实际值在表格中进行标记显示。
9、上述的分析方法,所述梯级参数包括梯级踏面后缘端点距梯级主轴中心的水平距离a、梯级踏面后缘端点距梯级主轴中心的垂直距离b;所述链条参数包括每个梯级的链节数量n和链节节距p;所述导轨参数包括自动扶梯导轨过渡圆弧的曲率半径r和自动扶梯的最大倾斜角度φ。
10、上述的分析方法,所述基于第一梯级的踢面曲线的圆心坐标和半径,以及所述第二梯级踏面后缘点的坐标,计算所述第一梯级和所述第二梯级的啮合间隙实际值,包括:
11、以梯级链节位于导轨水平段时所述第一梯级的主轴中心为坐标原点,建立平面直角坐标系;
12、根据第一梯级踢面的样点坐标,计算第一梯级的主轴中心o1(x1,y1)和第二梯级的主轴中心o2(x2,y2)在直角坐标系内的坐标;
13、根据所述第二梯级的主轴中心的坐标,计算所述第二梯级踏面后缘点的坐标q(xq,yq);
14、基于所述第一梯级的踢面曲线的圆心坐标o(x0,y0)和半径r,以及所述第二梯级踏面后缘点的坐标,计算所述第一梯级和所述第二梯级的啮合间隙实际值。
15、进一步的,上述的分析方法,所述第二梯级踏面后缘点的坐标q(xq,yq)为:
16、xq = x2-a (1)
17、yq = y2-b (2)。
18、进一步的,上述的分析方法,所述第一梯级和所述第二梯级的啮合间隙实际值为:
19、其中,d表示啮合间隙实际值,表示第一梯级的踢面曲线的圆心与第二梯级踏面后缘点的距离。
20、可选地,上述的分析方法,所述曲线样点包括所述第一梯级踢面的样点中的起点样点、中点样点和终点样点。
21、可选地,上述的分析方法,所述第一梯级和所述第二梯级的啮合间隙预期值为1-5mm。
22、本发明另一方面提供了一种梯级踢面啮合间隙分析系统,应用于自动扶梯,自动扶梯包括前后相邻的第一梯级和第二梯级,所述第一梯级位于两个梯级中的后侧,所述第二梯级位于两个梯级中的前侧,所述系统包括:
23、参数输入模块,用于输入预设参数,所述预设参数包括梯级参数、链条参数、导轨参数及所述第一梯级和所述第二梯级的啮合间隙预期值;
24、坐标计算模块,用于设置第一梯级踢面的样点纵向分布间隔,得到第一梯级踢面的样点坐标;
25、曲线生成模块,用于在所述第一梯级踢面的样点中选取多个样点记为曲线样点,并基于所述曲线样点的坐标计算其所在圆弧的圆心坐标和半径,根据所述圆心坐标和所述半径生成第一梯级的踢面曲线;
26、间隙计算模块,用于基于所述第一梯级的踢面曲线的圆心坐标和半径,以及第二梯级踏面后缘点的坐标,计算所述第一梯级和所述第二梯级的啮合间隙实际值;
27、间隙分析模块,用于分析所述啮合间隙实际值是否满足设定范围,并将不满足设定范围的啮合间隙实际值在表格中进行标记显示。
28、本发明还提供了一种电子设备,包括至少一个存储器,用于存储计算机程序;至少一个处理器,用于执行所述存储器存储的计算机程序;其中,当所述存储器存储的程序被执行时,所述处理器用于执行如上所述的梯级踢面啮合间隙分析方法。
29、此外,本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,当所述计算机程序在处理器上运行时,使得所述处理器执行如上所述的梯级踢面啮合间隙分析方法。
30、技术实现要素:中提供的效果仅仅是实施例的效果,而不是发明所有的全部效果,上述技术方案中的一个技术方案具有如下优点或有益效果:
31、本公开实施例提供的技术方案,根据输入的预设参数和啮合间隙预期值自动进行踢面样点生成和啮合间隙实际值计算,实现了啮合间隙的自动化处理,大幅减少了手工计算的时间,提高了设计效率。该方案通过对啮合间隙实际值进行计算分析,将不满足设定范围的啮合间隙实际值在表格中标记显示,能够帮助设计者快速识别当前设计问题,提高了设计质量。同时,该方案可根据实际需求进行不同的预设参数设置,提前预测和分析不同使用环境下啮合间隙的变化情况,满足不同应用场景的设计要求,减小了设计偏差,提高了自动扶梯的适用性和安全性,具有较高的实用价值。
本文地址:https://www.jishuxx.com/zhuanli/20240822/281294.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。