从2D设备网格中消除镜像对称和重力模糊的制作方法
- 国知局
- 2024-08-22 15:12:18
本发明涉及设备入网初始化(commissioning)领域,并且尤其涉及确定设备集合相对于重力的取向。
背景技术:
1、将诸如照明器或灯的智能设备引入各种各样的环境(例如,家庭环境、工业环境或临床环境)正变得越来越令人感兴趣。通常尝试定义一个网格或网络来定义设备相对于彼此的相对位置。特别地,将领会的是,设备可以形成假设的设备网格,每个设备代表网格的一个节点。确定关于该网格的信息有助于作为集体的设备的适当控制和/或单独地适当控制设备,例如,以知道如何最优地将通信路由到特定设备,或者如何控制设备网格来创建期望的集体输出。
2、设备的入网初始化通常是一个乏味的过程。这是因为个人通常必须告诉系统设备在哪里,例如通过将遥控器指向照明器并等待直到它闪烁,或者通过非常准确地记录哪个设备去了哪里。促进该过程的自动化将是有利的。
3、自动入网初始化过程正在开发中,其中可能基于rssi、飞行时间、或设备之间类似的距离响应测量来检索设备网格(其中每个设备形成一个节点)的形状。然而,这些方法仍然为在绝对空间中定义网格(以及因此每个设备)的位置和取向留下了若干自由度。参见例如us20100231404a1。
4、因此,期望促进设备网格和/或设备本身的附加属性的自动获取。
技术实现思路
1、本发明由权利要求书限定。
2、根据本发明一方面的示例,提供了一种计算机实现的方法,用于定义连接三个设备的集合的假设三角形的相对于重力的旋向性(handedness)。
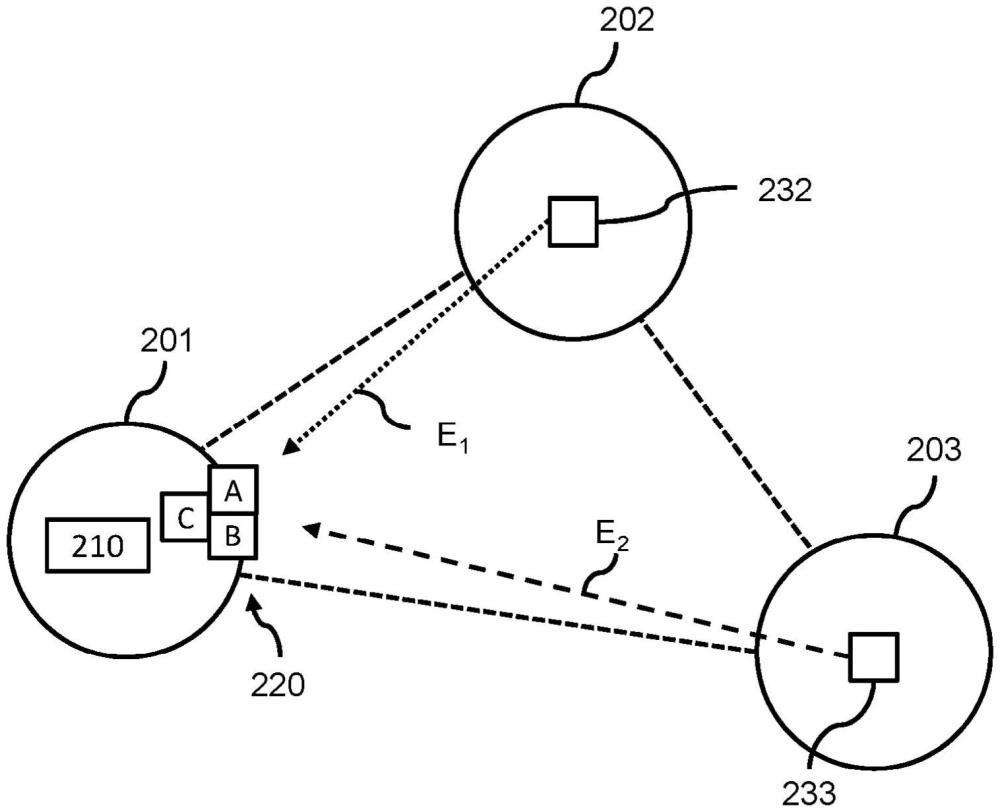
3、该计算机实现的方法包括:根据与第一设备相关联并且由第一设备包括的重力传感器来定义相对于第一设备的重力方向;从与三个设备的集合中的第一设备相关联的电磁检测器布置获得:指示三个设备的集合中的第二设备相对于第一设备的相对方向的第一指示符,其中第二设备被配置成输出可由电磁检测器布置检测的电磁能量;以及指示第三设备相对于第一设备的相对方向的第二指示符,其中第三设备被配置成输出可由电磁检测器布置检测的电磁能量;以及通过处理相对于第一设备、第一指示符和第二指示符的重力方向来定义假设三角形相对于重力的旋向性。
4、连接三个设备的三角形相对于重力的旋向性或手性有助于标识三角形(以及由此包含三角形的网格)相对于重力的取向。相对于重力的旋向性是相对于从三角形垂直上方的位置并在重力方向上观看的视图的旋向性。这减少了由用于对包含三个设备的网格进行入网初始化的自动入网初始化过程留下的不可标识的自由度的数量。
5、在本公开的上下文中,假设三角形由在第一设备开始、移动到第二设备、在返回到第一设备之前移动到第三设备的路径来定义。假设三角形的旋向性定义了该路径在包含该三角形的平面内是顺时针移动还是逆时针移动。
6、本公开提出了一种方法,其中相对于重力来定义或确定(连接三个设备的)假设三角形的旋向性。这有助于标识现有入网初始化方法的缺失特征。
7、因此,在诸方面中,如在本技术中定义的,定义的和/或确定的旋向性可以在与三个设备的集合相关联的自动入网初始化过程中使用和/或实现。例如,被布置用于对所述三个设备的集合进行自动入网初始化的处理系统可以被配置成接收或检索用于对所述三个设备的集合进行入网初始化的所述旋向性。
8、因此,在本发明的诸方面中,只有第一设备可以包括重力传感器,该重力传感器定义相对于第一设备的重力方向。
9、可选地,第二和第三设备各自包括一个或多个发光元件,并且与第一设备相关联的电磁检测器布置是光敏布置。电磁检测器可以是光电二极管布置。
10、第二和第三设备可以各自包括一个或多个射频发射元件,并且与第一设备相关联的电磁检测器布置可以是无线电敏感布置。
11、第二和第三设备可以各自包括一个或多个微波频率发射元件,并且具有第一设备的电磁检测器布置可以是微波敏感布置。
12、在一些示例中,与第一设备相关联的电磁检测器布置包括被配置或定位成具有不同的角度响应的三个或更多个电磁检测器的集合,使得从相同源发射的入射电磁能量的测量的大小对于每个电磁检测器是不同的。
13、可选地,第二设备和第三设备都被配置成可操作来向三个设备的集合输出唯一的电磁能量模式和/或频率,并且电磁检测器布置被配置成将电磁模式和/或频率彼此区分开。
14、在一些示例中,每个设备被配置为输出可见光,并且每个唯一的电磁能量模式和/或频率包括对于三个设备的集合而言唯一的光学编码消息。
15、在一些示例中,第二设备和第三设备都被配置成可在至少两种模式下操作,所述至少两种模式包括:入网初始化模式,在入网初始化模式中,设备向三个设备的集合输出唯一的电磁能量模式和/或频率;和运行模式,在运行模式中,设备不能够向三个设备的集合输出唯一的电磁能量模式和/或频率。
16、还提出了一种计算机实现的方法,用于确定形成位于单个平面中的多边形网格的多个假设三角形的相对于重力的旋向性,其中每个假设三角形将三个设备连接在一起,并且每个假设三角形形成多边形网格的不同面,该计算机实现的方法包括:如前所述执行以确定网格的第一三角形相对于重力的旋向性;以及对于网格的每个其他假设三角形,基于第一三角形的旋向性来确定该假设三角形相对于重力的旋向性。
17、该单个平面可以是非垂直平面。在一些示例中,单个平面是连接和/或安装设备的天花板平面。单个平面可以是水平的。在诸方面中,单个平面可以被表述为平坦平面。
18、还提出了一种包括计算机程序代码装置的计算机程序产品,该计算机程序代码装置当在具有处理系统的计算设备上执行时使得处理系统执行本文描述的任何方法的所有步骤。
19、还提出了一种用于定义连接三个设备的集合的第一假设三角形的相对于重力的旋向性的处理系统,该处理系统被配置成根据与第一设备相关联并且由第一设备包括的重力传感器来定义相对于第一设备的重力方向;从与三个设备的集合中的第一设备相关联的电磁检测器布置获得:指示三个设备的集合中的第二设备相对于第一设备的相对方向的第一指示符,其中第二设备被配置成输出可由电磁检测器布置检测的电磁能量;以及指示第三设备相对于第一设备的相对方向的第二指示符,其中第三设备被配置成输出可由电磁检测器布置检测的电磁能量;以及通过处理相对于第一设备、第一指示符和第二指示符的重力方向,定义连接三个设备的第一假设三角形相对于重力的旋向性。
20、还提出了一种系统,其包括:先前描述的处理系统和由第一假设三角形连接的三个设备的集合中的至少一个设备,其中至少一个设备至少包括第一设备,该第一设备包括处理系统,并且其中第一设备包括重力传感器。
21、还提出了一种系统,其包括:先前描述的处理系统;以及由第一假设三角形连接的三个设备的集合。
22、还提出了一种用于确定设备网格的相对于重力的取向的处理布置,其中每个设备被配置为输出电磁能量,并且该网格由将设备连接在一起的多个假设三角形形成,该处理布置包括:先前描述的处理系统,其中第一假设三角形是该网格的假设三角形之一;以及第二处理系统,其被配置为基于第一假设三角形的旋向性,为网格的每个假设三角形确定该假设三角形相对于重力的旋向性。
23、还提出了一种系统,其包括:先前描述的处理布置;以及设备网格。
24、参考下文描述的(一个或多个)实施例,本发明的这些和其他方面将是清楚的并得到阐述。
本文地址:https://www.jishuxx.com/zhuanli/20240822/281624.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
印刷布线板的制作方法
下一篇
返回列表