一种高墙喷涂机器人的制作方法
- 国知局
- 2024-08-30 14:22:44
本技术涉及建筑机器人,具体地,涉及一种高墙喷涂机器人。
背景技术:
1、在建筑装修中,涉及公建类项目,其装修墙面6米高,装修涉及到墙面清理、刮腻子、腻子打磨、乳胶漆喷涂等复杂工艺,传统工艺是工人通过搭架子完成高墙施工,施工复杂且需工人进行高空作业,存在安全隐患。
2、现有装修机器人可以满足3.2米喷涂高度,经检索,申请公开号为cn116971564a的中国发明专利,公开一种室内喷涂机器人,包括:底盘机构和设于底盘机构上的料桶机构、喷涂机构、六轴机械臂机构和喷枪,其中:六轴机械臂机构包括:提升模组,用于实现升降运动;横移模组,连接于提升模组上,用于实现水平方向移动;手臂俯仰关节,其一端固定于横移模组上,用于实现俯仰运动;手臂旋转关节,连接于手臂俯仰关节的另一端,用于实现水平旋转;末端俯仰关节,连接于手臂旋转关节上,用于实现上下旋转;末端旋转关节,连接于末端俯仰关节上,喷枪固定于末端旋转关节上,末端旋转关节用于实现喷枪的喷嘴水平换向。但是该专利仍无法满足6米喷涂高度。因此,有必要提供一种高墙喷涂机器人,以满足6米高度高墙涂料喷涂要求。
技术实现思路
1、针对现有技术中的缺陷,本实用新型的目的是提供一种高墙喷涂机器人。
2、本实用新型是通过以下技术方案实现的:
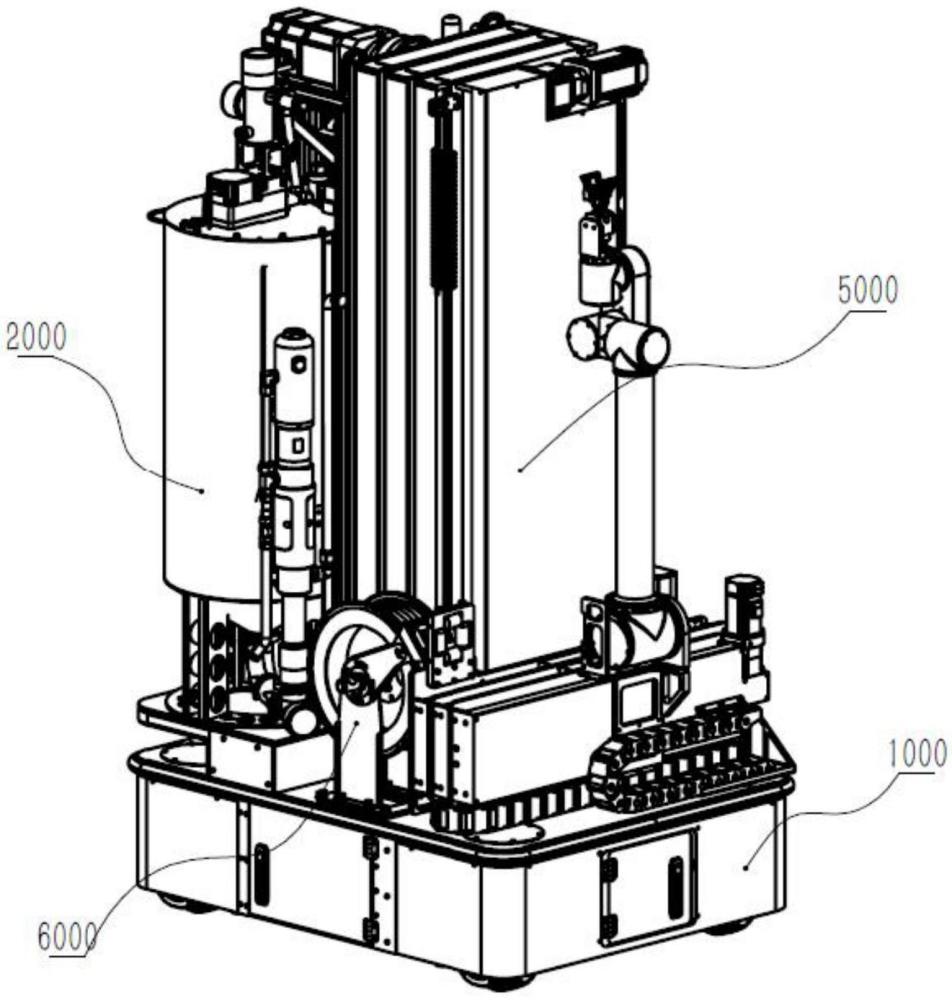
3、根据本实用新型的一个方面,提供一种高墙喷涂机器人,所述机器人包括底盘机构和设于所述底盘机构上的料桶机构、喷涂机构、六轴机械臂机构和喷枪,其中:
4、所述底盘机构,用于实现所述机器人的自主行走;
5、所述料桶机构起供料作用;
6、所述喷涂机构与所述料桶机构连接,为喷涂作业提供动力;
7、所述喷枪与所述料桶机构连接;
8、所述六轴机械臂机构,包括:
9、提升模组,用于实现升降运动;所述提升模组包括多级提升机构,多级提升机构之间通过动滑轮方式实现联动;
10、横移模组,连接于所述提升模组上,所述横移模组用于实现水平方向移动;
11、手臂俯仰关节,其一端固定于所述横移模组上,用于实现俯仰运动;
12、手臂旋转关节,连接于所述手臂俯仰关节的另一端,用于实现水平旋转;
13、末端俯仰关节,连接于所述手臂旋转关节上,用于实现上下旋转;
14、末端旋转关节,连接于所述末端俯仰关节上,所述喷枪固定于所述末端旋转关节上,所述末端旋转关节用于实现所述喷枪的喷嘴水平换向。
15、可选地,所述提升模组,包括:
16、基础提升一级,固定于机身上;
17、基础提升二级,连接于所述基础提升一级上;
18、基础提升三级,连接于所述基础提升二级上;
19、末端提升,连接于所述基础提升三级上。
20、可选地,所述基础提升一级,包括:
21、第一级底板,固定于机身上;
22、两根第一级导轨,分别固定于所述第一级底板一侧的表面上;
23、第一级滑块,位于所述第一级导轨上,所述第一级滑块上连接第一级连接板;
24、第一级减速机,连接于所述第一级底板另一侧,由第一级伺服电机提供动力;
25、第一级链轮一,连接于所述第一级底板一侧的一端,所述第一级链轮一与所述第一级减速机的输出轴连接;
26、第一级链轮二,连接于所述第一级底板一侧的另一端,所述第一级链轮一和所述第一级链轮二位于两根所述第一级导轨之间;
27、第一级链条,套设于所述第一级链轮一和所述第一级链轮二上,所述第一级链条与其中一侧的所述第一级连接板固定连接;
28、第一级盖板,包括包裹所述基础提升一级表面的第一级盖板一和第一级盖板二;所述第一级连接板靠近所述基础提升一级侧边缘的部分凸出于所述第一级盖板;
29、第一级固定座,连接于所述第一级底板上,且自所述第一级盖板一和所述第一级盖板二之间露出。
30、可选地,所述基础提升二级,包括:
31、第二级底板,固定于所述第一级连接板凸出于所述第一级盖板的部分;
32、两个第二级导轨,分别固定于所述第二级底板一侧的表面上;
33、第二级滑块,位于所述第二级导轨上,所述第二级滑块上连接第二级连接板;
34、第二级链轮,固定于所述第二级底板一侧的一端;所述第二级链轮位于两个第二级导轨之间;
35、第二级链条,一侧固定于所述第一级固定座上,另一侧与所述第二级连接板连接;
36、第二级盖板,包括包裹所述基础提升二级表面的第二级盖板一和第二级盖板二,所述第二级连接板靠近所述基础提升二级侧边缘的部分凸出于所述第二级盖板;
37、第二级固定座,连接于所述第二级底板上,且自所述第二级盖板一和所述第二级盖板二之间露出。
38、可选地,所述基础提升三级,包括:
39、第三级底板,固定于所述第二级连接板凸出于所述第二级盖板的部分上;
40、两个第三级导轨,分别固定于所述第三级底板一侧的表面上;
41、第三级滑块,位于所述第三级导轨上,所述第三级滑块连接第三级连接板;
42、第三级链轮,固定于所述第三级底板一侧的一端;
43、第三级链条,一侧固定于所述第二级固定座上,另一侧连接所述第三级连接板;
44、第三级盖板,包裹所述基础提升三级,所述第三级连接板靠近所述基础提升三级侧边缘的部分凸出于所述第三级盖板。
45、可选地,所述末端提升,包括:
46、第四级底板,固定于所述第三级连接板凸出于所述第三级盖板的部分上;
47、两个第四级导轨,分别固定于所述第四级底板一侧的表面上,所述第四级导轨上连接有第四级连接块;
48、第四级减速机,连接于所述第四级底板的一端,由第四级伺服电机提供动力;
49、第四级同步轮一,与所述第四级减速机的输出轴连接;
50、第四级同步轮二,设于所述第四级底板的另一端,所述第四级同步轮一与所述第四级同步轮二通过第四级同步带连接;
51、第四级盖板,包裹所述末端提升。
52、可选地,所述横移模组,包括:
53、基础横移一级,连接于所述末端提升上;
54、基础横移二级,连接于所述基础横移一级上;
55、末端横移,连接于所述基础横移二级上。
56、可选地,所述基础横移一级,包括:
57、基础横移一级底板,连接于所述末端提升上;
58、两条基础横移一级导轨,分别固定于所述基础横移一级底板一侧的表面上;
59、基础横移一级滑块,沿着所述基础横移一级导轨滑动,所述基础横移一级滑块上连接基础横移一级连接板;
60、基础横移一级减速机,连接于所述基础横移一级底板另一侧的一端,由基础横移一级伺服电机提供动力;
61、基础横移一级同步轮一,与所述基础横移一级减速机的输出轴连接;
62、基础横移一级同步轮二,设于所述基础横移一级底板一侧的另一端;所述基础横移一级同步轮一与所述基础横移一级同步轮二通过基础横移一级同步带连接;
63、基础横移一级盖板,包括包裹基础横移一级的基础横移一级盖板一和基础横移一级盖板二,所述基础横移一级连接板靠近所述基础横移一级侧边缘的部分凸出于所述基础横移一级盖板;
64、基础横移一级固定座,固定于所述基础横移一级底板的中间位置,且自所述基础横移一级盖板一和所述基础横移一级盖板二之间露出;所述基础横移一级固定座的外露部分设有基础横移一级同步带夹板。
65、可选地,所述基础横移二级,包括:
66、基础横移二级底板,连接于所述基础横移一级连接板上;
67、两条基础横移二级导轨,固定于所述基础横移二级底板一侧的表面上;
68、基础横移二级滑块,沿着所述基础横移二级导轨滑动,所述基础横移二级滑块上连接基础横移二级连接板;
69、基础横移二级同步轮一和基础横移二级同步轮二,分别设于所述基础横移二级底板的两端;所述基础横移二级同步轮一和所述基础横移二级同步轮二通过基础横移二级同步带连接;所述基础横移二级同步带的一端与所述基础横移一级同步带夹板连接,另一端通过基础横移二级同步带夹板固定于所述基础横移二级连接板上;
70、基础横移二级盖板,包裹所述基础横移二级,所述基础横移二级连接板靠近所述基础横移二级侧边缘的部分凸出于所述基础横移二级盖板。
71、可选地,所述末端横移,包括:
72、末端横移底板,连接于所述基础横移二级连接板上;
73、两条末端横移导轨,固定于所述末端横移底板一侧的表面上;
74、末端横移滑块,沿着所述末端横移导轨滑动,所述末端横移滑块上连接末端横移连接板;
75、末端横移减速机,连接于所述末端横移底板的一端,由末端横移伺服电机提供动力;
76、末端横移同步轮一,与所述末端横移减速机的输出轴连接;
77、末端横移同步轮二,设于所述末端横移底板的另一端,所述末端横移同步轮一和所述末端横移同步轮二通过末端横移同步带连接;
78、末端横移盖板,包裹所述末端横移,所述末端横移连接板靠近所述末端横移侧边缘的部分凸出于所述末端横移盖板。
79、与现有技术相比,本实用新型具有如下至少之一的有益效果:
80、本实用新型提供的高墙喷涂机器人,六轴机械臂机构包括提升模组、横移模组、手臂俯仰关节、手腕旋转关节、末端俯仰关节、末端旋转关节六个自由度,且提升模组的多级提升机构之间通过动滑轮方式实现联动,该机器人可以完成6米高墙面喷涂,避免了工人进行高空作业的安全隐患,可以提高施工安全性。而且,该机器人可以实现乳胶漆和腻子全自动喷涂作业,一机两用,可以节省多机成本。
本文地址:https://www.jishuxx.com/zhuanli/20240830/281724.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表