一种多个GNSS测站的联合定位方法及联合定位装置与流程
- 国知局
- 2024-08-30 14:29:00
本技术涉及gnss定位,尤其是涉及一种多个gnss测站的联合定位方法及联合定位装置。
背景技术:
1、高精度gnss(global navigation satellite system)定位技术现已广泛应用于大地测量,矿山测绘,智慧城市以及智能交通等行业。传统相对定位一般采用单基线计算方法,即一个流动站对应一个基准站,使用双差观测值建立误差方程,通过误差传播定律给定观测值的权阵,进而估计流动站坐标参数。
2、在特殊情况下,比如精密变形监测领域,同一观测时段往往存在多个测站接收机,此时,传统单基线计算方法仅能两两测站进行解算,最后汇总单基线计算结果,而无法同时进行多个测站的联合定位计算。由于传统单基线计算方法并没有联合考虑各个测站之间的相互关系,因此,不能在整网条件下获得坐标参数的最优估计,将单基线计算结果整合到一起,在任意三个测站构成的三角形闭合环中,单基线计算结果不可避免地存在坐标闭合差。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种多个gnss测站的联合定位方法及联合定位装置,通过构建多个测站的联合定位观测方程,然后利用等价变换方法并基于联合定位观测方程构建了多个测站的目标等价双差观测方程,接着通过目标等价双差观测方程确定出目标估计参数和目标协方差矩阵,最后基于目标估计参数和目标协方差矩阵确定出每个流动站的坐标参数,实现了多个测站观测数据的联合定位,通过多个测站联合定位,更优地解决了多测站定位的误差分配,使得坐标闭合差减小,获得最优坐标参数,提高了定位的准确性。
2、第一方面,本技术实施例提供了一种多个gnss测站的联合定位方法,所述联合定位方法包括:
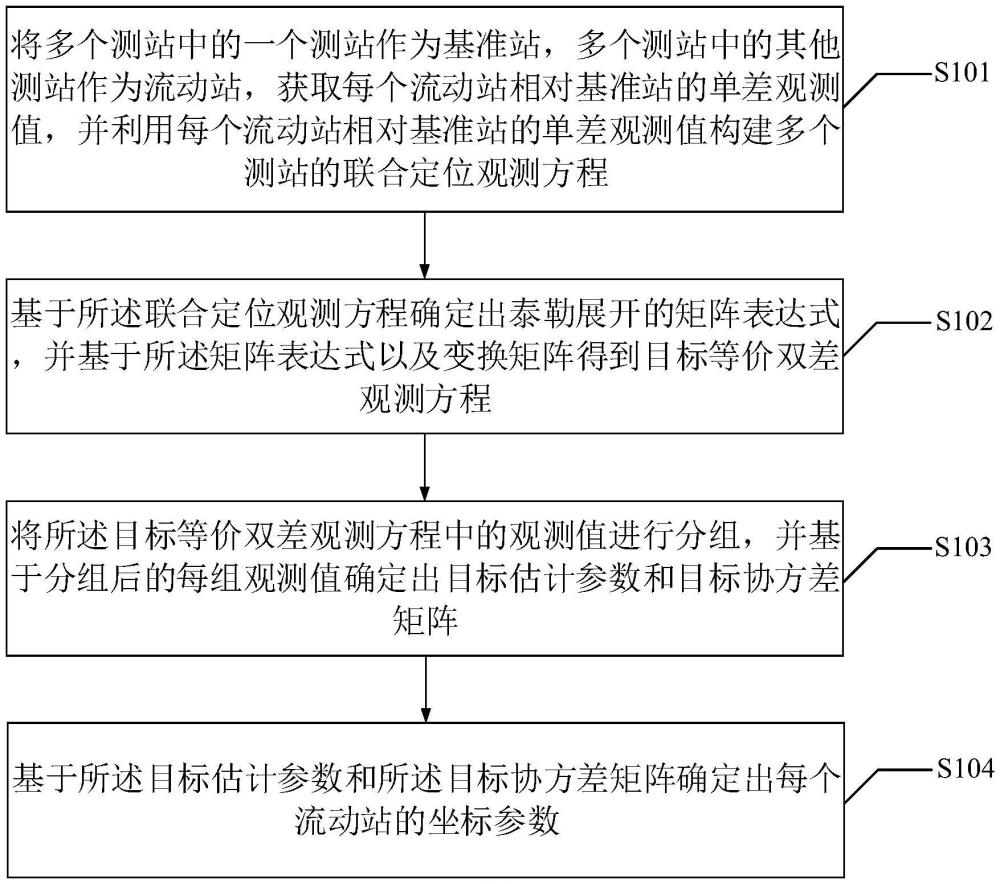
3、将多个测站中的一个测站作为基准站,多个测站中的其他测站作为流动站,获取每个流动站相对基准站的单差观测值,并利用每个流动站相对基准站的单差观测值构建多个测站的联合定位观测方程;
4、基于所述联合定位观测方程确定出泰勒展开的矩阵表达式,并基于所述矩阵表达式以及变换矩阵得到目标等价双差观测方程;
5、将所述目标等价双差观测方程中的观测值进行分组,并基于分组后的每组观测值确定出目标估计参数和目标协方差矩阵;
6、基于所述目标估计参数和所述目标协方差矩阵确定出每个流动站的坐标参数。
7、进一步的,所述基于所述联合定位观测方程确定出泰勒展开的矩阵表达式,包括:
8、获取每个流动站相对基准站的单差观测值的方差值,建立单差观测值的权矩阵;
9、基于所述单差观测值的权矩阵,对所述联合定位观测方程进行泰勒展开以得到所述矩阵表达式。
10、进一步的,所述基于所述矩阵表达式以及变换矩阵得到目标等价双差观测方程,包括:
11、根据等价变换理论构造消除接收机钟差之差参数的变换矩阵;
12、将所述矩阵表达式与所述变换矩阵相乘,得到消除了钟差之差参数的等价双差观测方程;
13、将所述等价双差观测方程简化为矩阵形式,并基于所述单差观测值的权矩阵和单差观测值的协方差矩阵的对应关系,以得到所述目标等价双差观测方程。
14、进一步的,所述基于分组后的每组观测值确定出目标估计参数和目标协方差矩阵,包括:
15、利用对分组后的每组观测值依次进行测量更新,以获取最后一组观测值对应的状态参数和最后一组观测值对应的协方差矩阵;
16、对所述最后一组观测值对应的状态参数和所述最后一组观测值对应的协方差矩阵的浮点模糊度部分进行分离,得到所述目标估计参数和所述目标协方差矩阵。
17、进一步的,所述基于所述目标估计参数和所述目标协方差矩阵确定出每个流动站的坐标参数,包括:
18、采用模糊度搜索算法,基于设定条件、所述目标估计参数以及所述目标协方差矩阵,获取等价双差模糊度固定解;
19、基于所述等价双差模糊度固定解、所述目标估计参数以及所述目标协方差矩阵,确定出每个流动站的坐标参数。
20、第二方面,本技术实施例还提供了一种多个gnss测站的联合定位装置,所述联合定位装置包括:
21、联合观测方程构建模块,用于将多个测站中的一个测站作为基准站,多个测站中的其他测站作为流动站,获取每个流动站相对基准站的单差观测值,并利用每个流动站相对基准站的单差观测值构建多个测站的联合定位观测方程;
22、等价双差观测方程确定模块,用于基于所述联合定位观测方程确定出泰勒展开的矩阵表达式,并基于所述矩阵表达式以及变换矩阵得到目标等价双差观测方程;
23、参数确定模块,用于将所述目标等价双差观测方程中的观测值进行分组,并基于分组后的每组观测值确定出目标估计参数和目标协方差矩阵;
24、坐标参数确定模块,用于基于所述目标估计参数和所述目标协方差矩阵确定出每个流动站的坐标参数。
25、进一步的,所述等价双差观测方程确定模块在用于基于所述联合定位观测方程确定出泰勒展开的矩阵表达式时,所述等价双差观测方程确定模块还用于:
26、获取每个流动站相对基准站的单差观测值的方差值,建立单差观测值的权矩阵;
27、基于所述单差观测值的权矩阵,对所述联合定位观测方程进行泰勒展开以得到所述矩阵表达式。
28、进一步的,所述等价双差观测方程确定模块在用于基于所述矩阵表达式以及变换矩阵得到目标等价双差观测方程时,所述等价双差观测方程确定模块还用于:
29、根据等价变换理论构造消除接收机钟差之差参数的变换矩阵;
30、将所述矩阵表达式与所述变换矩阵相乘,得到消除了钟差之差参数的等价双差观测方程;
31、将所述等价双差观测方程简化为矩阵形式,并基于所述单差观测值的权矩阵和单差观测值的协方差矩阵的对应关系,以得到所述目标等价双差观测方程。
32、第三方面,本技术实施例还提供一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如上述的多个gnss测站的联合定位方法的步骤。
33、第四方面,本技术实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如上述的多个gnss测站的联合定位方法的步骤。
34、本技术实施例提供的一种多个gnss测站的联合定位方法及联合定位装置,首先,将多个测站中的一个测站作为基准站,多个测站中的其他测站作为流动站,获取每个流动站相对基准站的单差观测值,并利用每个流动站相对基准站的单差观测值构建多个测站的联合定位观测方程;然后,基于所述联合定位观测方程确定出泰勒展开的矩阵表达式,并基于所述矩阵表达式以及变换矩阵得到目标等价双差观测方程;将所述目标等价双差观测方程中的观测值进行分组,并基于分组后的每组观测值确定出目标估计参数和目标协方差矩阵;最后,基于所述目标估计参数和所述目标协方差矩阵确定出每个流动站的坐标参数。
35、本技术通过构建多个测站的联合定位观测方程,然后利用等价变换方法并基于联合定位观测方程构建了多个测站的目标等价双差观测方程,接着通过目标等价双差观测方程确定出目标估计参数和目标协方差矩阵,最后基于目标估计参数和目标协方差矩阵确定出每个流动站的坐标参数,实现了多个测站观测数据的联合定位,通过多个测站联合定位,更优地解决了多测站定位的误差分配,使得坐标闭合差减小,获得最优坐标参数,提高了定位的准确性。同时降低了多基线定位技术的应用难度,当存在多个测站时,多基线解算模型精度优于传统单基线模型。
36、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
本文地址:https://www.jishuxx.com/zhuanli/20240830/282286.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表