合成孔径雷达稀疏成像方法、系统及存储介质
- 国知局
- 2024-08-30 14:28:58
本申请涉及合成孔径雷达,特别涉及一种合成孔径雷达稀疏成像方法、系统及存储介质。
背景技术:
1、合成孔径雷达(synthetic aperture radar,sar)是一种主动式微波遥感成像技术,它传输具有一定穿透能力的微波信号,可以实现全天时、全天候的对地观测,被广泛应用于环境监测、防灾减灾等领域。高分辨率合成孔径雷达(sar)成像可以获得更丰富的细节,提高目标的监测和识别能力,但是高分辨率通常需要庞大的计算量和存储空间。由于雷达成像系统的性能提升受雷达分辨理论和奈奎斯特(nyquist)采样定理的约束,高分辨率雷达成像系统的计算复杂度很高,难以实现快速成像,不能满足实时观测的需求。
2、稀疏信号处理领域中的压缩感知(cs)理论,即当信号稀疏或信号在变换域稀疏时,能够以远低于奈奎斯特采样定理规定的采样频率进行采样,用较少的观测数据实现较复杂的系统。结合稀疏信号处理和sar成像形成一种新的成像策略,即合成孔径雷达(sar)的稀疏化成像方法,它突破了奈奎斯特采样定理的限制,利用部分回波信号即可获得高精度成像结果,而且具有更强的旁瓣、噪声抑制能力,获得了更高的成像分辨率以及成像质量。
3、合成孔径雷达(sar)的稀疏成像模型的求解可以等价为线性逆问题,常用求解方法为最小正则化线性最小二乘法,但是单一的正则化约束难以满足多种目标特征增强的需要,成像效果不佳。增强点目标的成像方法最常用的是基于l1正则化的稀疏合成孔径雷达(sar)成像,它具有抑制旁瓣、减小噪声的优点。但是,l1范数是凸函数,它的解析解是有偏估计,会增大模型重构误差影响重建精度。l1正则化只能对点目标进行增强,区域中连续目标的特征增强效果较差。因此,需要提供一种能够解决上述问题的合成孔径雷达稀疏成像方法。
技术实现思路
1、有鉴于现有技术中存在的上述至少一个技术问题而提出了本申请。根据本申请一方面,提供了一种合成孔径雷达稀疏成像方法,所述方法包括:
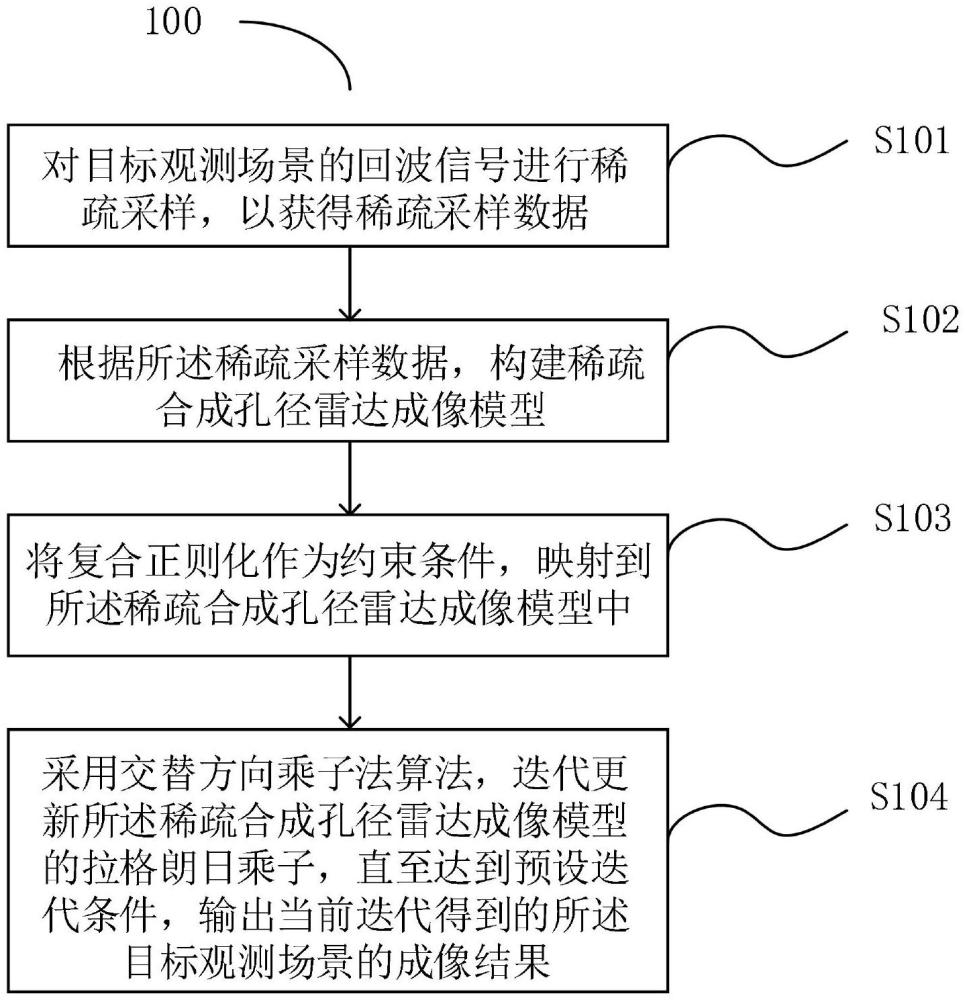
2、对目标观测场景的回波信号进行稀疏采样,以获得稀疏采样数据;
3、根据所述稀疏采样数据,构建稀疏合成孔径雷达成像模型;
4、将复合正则化作为约束条件,映射到所述稀疏合成孔径雷达成像模型中;
5、采用交替方向乘子法算法,迭代更新所述稀疏合成孔径雷达成像模型的拉格朗日乘子,直至达到预设迭代条件,输出当前迭代得到的所述目标观测场景的成像结果。
6、在一些实施例中,采用复合正则化作为约束条件,映射到所述稀疏合成孔径雷达成像模型中,包括:
7、采用可用变量分裂法将约束优化条件映射到所述稀疏合成孔径雷达成像模型中;
8、其中,具有约束优化条件的所述稀疏合成孔径雷达成像模型如下:
9、
10、其中,x表示目标观测场景;y表示回波采样数据;φ表示观测矩阵;β≥0表示辅助变量;γ>1表示非凸判罚函数的参数;⊙表示卡特里—拉奥积,即逐元素的乘法;δ≥0表示非凸判罚的加权值;tv(|x|)表示全变分正则化判罚函数;λ2表示全变分正则化的正则化参数;z1、z2表示辅助变量;||·||2、||·||1分别表示l2范数和l1范数。
11、在一些实施例中,采用交替方向乘子法算法,迭代更新所述稀疏合成孔径雷达成像模型的拉格朗日乘子,直至达到预设迭代条件,包括:
12、采用交替方向乘子法算法将所述具有约束优化条件的稀疏合成孔径雷达成像模型中的拉格朗日乘子转化为以下形式:
13、
14、其中,x表示目标观测场景;y表示回波采样数据;φ表示观测矩阵;β≥0表示辅助变量;δ≥0表示非凸判罚的加权值;γ>1表示非凸判罚函数的参数;tv(|x|)表示全变分正则化判罚函数;λ2表示全变分正则化的正则化参数;z1、z2表示辅助变量;l1、l2表示拉格朗日乘子;||·||2、||·||1分别表示l2范数和l1范数。
15、在一些实施例中,采用交替方向乘子法算法,迭代更新所述稀疏合成孔径雷达成像模型的拉格朗日乘子,直至达到预设迭代条件,还包括:
16、采用交替方向乘子法对公式(2)的目标观测场景x进行更新;
17、更新公式(2)的辅助变量z1;
18、更新公式(2)的辅助变量β;
19、更新公式(2)的非凸权重δ;
20、更新公式(2)的辅助变量z2;
21、更新公式(2)的拉格朗日乘子l1;
22、更新公式(2)的拉格朗日乘子l2;
23、迭代上述步骤,直至达到预设迭代条件。
24、在一些实施例中,所述预设迭代条件包括:预设最大迭代次数或者满足预设误差条件。
25、在一些实施例中,其中,所述辅助变量z2的更新公式如下:
26、
27、其中,x表示目标观测场景;λtv=λ2/2l2表示正则化参数;p=(p1,p2)表示对偶变量;t表示迭代次数;div(·)表示离散散度算子;sign(·)表示符号函数。
28、在一些实施例中,其中,所述对偶变量为采用投影梯度下降法求解得到的。
29、在一些实施例中,所述稀疏合成孔径雷达成像模型如下:
30、y=φx+n (4)
31、其中,x表示目标观测场景,y表示回波采样数据,φ表示观测矩阵,n表示目标观测场景噪声。
32、本申请实施例另一方面提供了一种合成孔径雷达稀疏成像系统,所述系统包括:
33、存储器和处理器,所述存储器上存储有由所述处理器运行的计算机程序,所述计算机程序在被所述处理器运行时,使得所述处理器执行如上所述的合成孔径雷达稀疏成像方法。
34、本申请实施例又一方面提供了一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序在被处理器运行时使得所述处理器执行如上所述的合成孔径雷达稀疏成像方法。
35、本申请实施例的合成孔径雷达稀疏成像方法,将复合正则化作为稀疏合成孔径雷达成像模型的约束条件,迭代交替更新稀疏合成孔径雷达成像模型的拉格朗日乘子,直至达到预设迭代条件,得到目标观测场景的图像。本申请实施例一方面使用复合正则化约束可以同时增强点目标和连续目标的特征,满足高分辨率成像的需要,并且可以进一步促进重构结果的稀疏性,减小存储压力;另一方面采用交替方向乘子法算法可以实现快速求解,可以满足实时成像的需求。
技术特征:1.一种合成孔径雷达稀疏成像方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,采用复合正则化作为约束条件,映射到所述稀疏合成孔径雷达成像模型中,包括:
3.根据权利要求2所述的方法,其特征在于,采用交替方向乘子法算法,迭代更新所述稀疏合成孔径雷达成像模型的拉格朗日乘子,直至达到预设迭代条件,包括:
4.根据权利要求3所述的方法,其特征在于,采用交替方向乘子法算法,迭代更新所述稀疏合成孔径雷达成像模型的拉格朗日乘子,直至达到预设迭代条件,还包括:
5.根据权利要求4所述的方法,其特征在于,所述预设迭代条件包括:预设最大迭代次数或者满足预设误差条件。
6.根据权利要求4所述的方法,其特征在于,其中,所述辅助变量z2的更新公式如下:
7.根据权利要求6所述的方法,其特征在于,其中,所述对偶变量为采用投影梯度下降法求解得到的。
8.根据权利要求1所述的方法,其特征在于,所述稀疏合成孔径雷达成像模型如下:
9.一种合成孔径雷达稀疏成像系统,其特征在于,所述系统包括:
10.一种存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序在被处理器运行时使得所述处理器执行如权利要求1至8任一项所述的合成孔径雷达稀疏成像方法。
技术总结本申请提供一种合成孔径雷达稀疏成像方法、系统及存储介质。所述方法包括:对目标观测场景的回波信号进行稀疏采样,以获得稀疏采样数据;根据所述稀疏采样数据,构建稀疏合成孔径雷达成像模型;将复合正则化作为约束条件,映射到所述稀疏合成孔径雷达成像模型中;采用交替方向乘子法算法,迭代更新所述稀疏合成孔径雷达成像模型的拉格朗日乘子,直至达到预设迭代条件,输出当前迭代得到的所述目标观测场景的成像结果。本申请实施例一方面使用复合正则化约束可以同时增强点目标和连续目标的特征,满足高分辨率成像的需要;另一方面采用交替方向乘子法算法可以实现快速求解,可以满足实时成像的需求。技术研发人员:高志奇,李贺贺,黄平平,谭维贤,乞耀龙受保护的技术使用者:内蒙古工业大学技术研发日:技术公布日:2024/8/27本文地址:https://www.jishuxx.com/zhuanli/20240830/282282.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表