一种矿井下轨迹采集系统及方法与流程
- 国知局
- 2024-08-30 14:29:13
本发明涉及轨迹采集,具体涉及一种矿井下轨迹采集系统及方法。
背景技术:
1、井下开采指的是煤炭开采中与露天开采相对应的一种开采方式,与露天开采相比,井下开采技术的难度要高得多,但由于大多数煤矿都埋藏在地下,因此必须采用井下开采方式,矿井在开采的时候矿道错综复杂,立体感较强,为了保证矿工的安全,需要对矿工的行动轨迹进行实时采集。
2、现有的轨迹采集系统在使用时只是通过北斗实时定位实现轨迹的采集,由于矿井下信号较差,容易出现无信号的现象,从而导致轨迹采集的准确率降低因此需要进行改进;
3、为此,发明一种矿井下轨迹采集系统及方法很有必要。
技术实现思路
1、为此,本发明提供一种矿井下轨迹采集系统及方法,以解决背景技术中的问题。
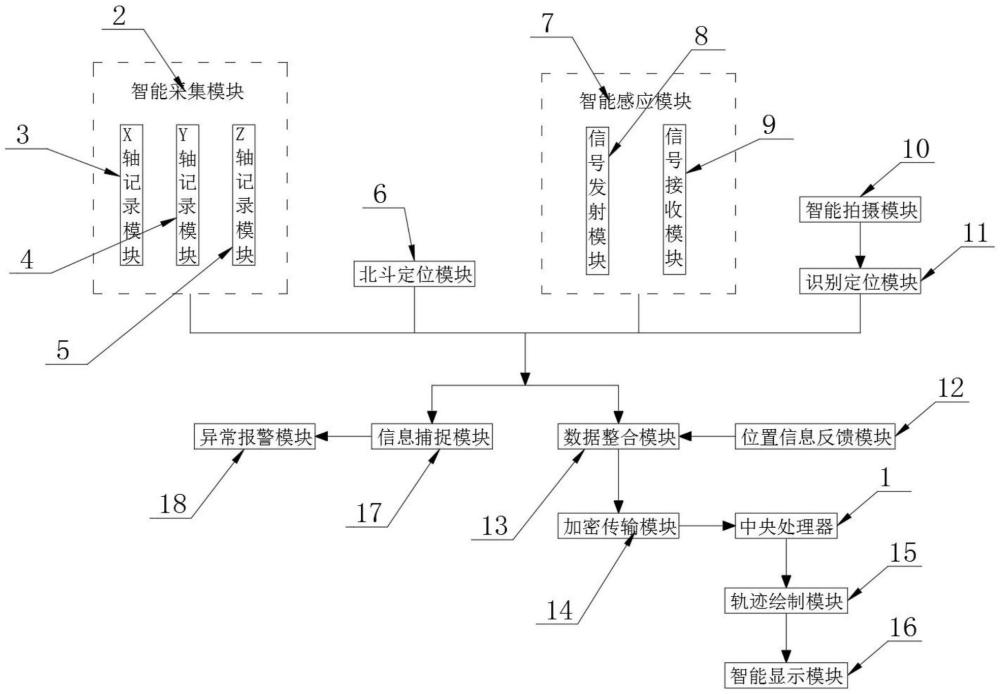
2、为了实现上述目的,本发明提供如下技术方案:一种矿井下轨迹采集系统,包括:
3、中央处理器,其用于保障系统的计算和运行;
4、智能采集模块,其用于采集矿工行走的方向和距离,所述智能采集模块包括x轴记录模块、y轴记录模块以及z轴记录模块,所述x轴记录模块用于记录矿工在x轴方向上行走了多少距离,所述y轴记录模块用于记录矿工在y轴方向上行走了多少距离,所述z轴记录模块用于记录矿工在z轴方向上行走了多少距离;
5、北斗定位模块,其用于对矿工的位置进行实时定位;
6、智能感应模块,所述智能感应模块包括信号发射模块和信号接收模块,所述信号发射模块用于发射感应信号,所述信号接收模块用于接收感应信号;
7、智能拍摄模块,其用于对矿井中的画面进行实时拍摄;
8、识别定位模块,其用于识别矿工出现在哪一个智能拍摄模块所拍摄的视频画面中,同时获取拍摄视频画面的位置,所述识别定位模块连接在智能拍摄模块输出端;
9、位置信息反馈模块,其用于矿工定时反馈自己当时所处的位置;
10、数据整合模块,其用于整合智能采集模块、北斗定位模块、智能感应模块、识别定位模块以及位置信息反馈模块所产生的数据信息,进而得到矿工准确的行动轨迹,所述数据整合模块连接在智能采集模块、北斗定位模块、智能感应模块、识别定位模块以及位置信息反馈模块输出端;
11、加密传输模块,其用于加密传输数据整合模块所整合的信息,所述加密传输模块连接在数据整合模块输出端,所述加密传输模块连接在中央处理器输入端;
12、轨迹绘制模块,其用于绘制矿工的行动轨迹,所述轨迹绘制模块连接在中央处理器输出端;
13、智能显示模块,其用于显示轨迹绘制模块所绘制的行动轨迹,所述智能显示模块连接在轨迹绘制模块输出端;
14、信息捕捉模块,其用于捕捉智能采集模块、北斗定位模块、智能感应模块以及识别定位模块所产生的数据信息,所述信息捕捉模块连接在智能采集模块、北斗定位模块、智能感应模块以及识别定位模块输出端;
15、异常报警模块,其用于在信息捕捉模块没有正常捕捉到数据信息时的报警工作,所述异常报警模块连接在信息捕捉模块输出端。
16、优选的,所述识别定位模块与智能拍摄模块电性连接,所述数据整合模块与智能采集模块、北斗定位模块、智能感应模块、识别定位模块以及位置信息反馈模块电性连接。
17、优选的,所述加密传输模块与数据整合模块电性连接,所述加密传输模块与中央处理器电性连接。
18、优选的,所述轨迹绘制模块与中央处理器电性连接,所述智能显示模块与轨迹绘制模块电性连接。
19、优选的,所述信息捕捉模块与智能采集模块、北斗定位模块、智能感应模块以及识别定位模块电性连接,所述异常报警模块与信息捕捉模块电性连接。
20、优选的,所述智能拍摄模块包括摄像头本体,所述摄像头本体外部套设有外壳,所述外壳内部固定连接有支撑板,所述支撑板内部嵌设有旋转块,所述旋转块与摄像头本体顶部固定连接,所述外壳顶部固定连接有定位杆,所述定位杆外部滑动套设有外框,所述旋转块顶部固定连接有转轴一,所述转轴一位于外框内部,所述转轴一外部固定套设有齿轮,所述齿轮后侧设有与其啮合连接的齿板,所述齿板与外框后侧内壁固定连接。
21、优选的,所述外框一侧固定连接有电动伸缩杆,所述电动伸缩杆固定嵌设在外壳一侧,所述外壳一侧开设有通槽,所述外壳前侧固定连接有电机一,所述电机一输出轴固定连接有转轴二,所述转轴二贯穿外壳,所述转轴二外部固定连接有清洁刷,所述清洁刷贯穿通槽。
22、优选的,所述外壳另一侧内壁固定连接有箱体,所述外壳顶部固定连接有电机二,所述电机二输出轴固定连接有转轴三,所述转轴三底端延伸至箱体内部,所述转轴三底端外部固定套设有扇叶,所述箱体底部以及外壳另一侧固定嵌设有管道一,所述管道一上固定嵌设有管道二,所述箱体顶部开设有两个进风槽,所述外壳顶部固定连接有安装架,所述安装架内部开设有安装孔。
23、优选的,所述旋转块与支撑板通过轴承连接,所述转轴二与外壳通过轴承连接,所述转轴三与外壳和箱体通过轴承连接。
24、本发明还提供一种矿井下轨迹采集方法,具体步骤如下:
25、s1、智能采集模块可以采集矿工在矿井中的行走的方向和距离,进而得到行走数据信息,然后北斗定位模块可以对矿工的位置进行实时定位,同时矿工的身上携带着信号发射模块,而矿井中的矿灯上安装有信号接收模块,然后矿工在经过一个矿灯的时候信号发射模块与信号接收模块相互感应,这样也可以得到矿工的行走数据信息;
26、s2、智能拍摄模块可以对矿井中的画面进行无死角的实时拍摄,同时识别定位模块可以根据拍摄的视频画面得知矿工出现在哪一个智能拍摄模块所拍摄的视频画面中,并且还可以获取拍摄视频画面的位置,矿工行走的时候还可以通过位置信息反馈模块定时反馈自己当时所处的位置,进而可以得到矿工的行走数据信息;
27、s3、然后在数据整合模块的作用下可以对智能采集模块、北斗定位模块、智能感应模块、识别定位模块以及位置信息反馈模块所产生的数据信息进行整合;
28、s4、得到行动数据信息后轨迹绘制模块就可以根据行动数据信息将行动轨迹图绘制出来,并在智能显示模块上进行显示,进而实现轨迹采集。
29、本发明的有益效果是:
30、1、本发明通过智能采集模块、北斗定位模块、信号发射模块、信号接收模块、识别定位模块以及位置信息反馈模块的设计,可以多方式的获取矿工的行走数据信息,然后对多种方式获取的行走数据信息进行整合以得到矿工的行动轨迹,这样所采集的行动轨迹准确率高,即使北斗定位模块在进行北斗定位的时候出现信号差无信号的现象也不会影响采集的准确率;
31、2、本发明通过电机一工作可以使清洁刷与摄像头本体相贴合,然后控制电动伸缩杆工作就可以使转轴一、旋转块以及摄像头本体不断的来回转动,由于清洁刷与摄像头本体相贴合,这样在来回转动的时候就可以对摄像头本体上的灰尘进行清理,进而避免矿井中的灰尘影响摄像头本体的拍摄质量。
技术特征:1.一种矿井下轨迹采集系统,其特征在于,包括:
2.根据权利要求1所述的一种矿井下轨迹采集系统,其特征在于:所述识别定位模块(11)与智能拍摄模块(10)电性连接,所述数据整合模块(13)与智能采集模块(2)、北斗定位模块(6)、智能感应模块(7)、识别定位模块(11)以及位置信息反馈模块(12)电性连接。
3.根据权利要求1所述的一种矿井下轨迹采集系统,其特征在于:所述加密传输模块(14)与数据整合模块(13)电性连接,所述加密传输模块(14)与中央处理器(1)电性连接。
4.根据权利要求1所述的一种矿井下轨迹采集系统,其特征在于:所述轨迹绘制模块(15)与中央处理器(1)电性连接,所述智能显示模块(16)与轨迹绘制模块(15)电性连接。
5.根据权利要求1所述的一种矿井下轨迹采集系统,其特征在于:所述信息捕捉模块(17)与智能采集模块(2)、北斗定位模块(6)、智能感应模块(7)以及识别定位模块(11)电性连接,所述异常报警模块(18)与信息捕捉模块(17)电性连接。
6.根据权利要求1所述的一种矿井下轨迹采集系统,其特征在于:所述智能拍摄模块(10)包括摄像头本体(19),所述摄像头本体(19)外部套设有外壳(20),所述外壳(20)内部固定连接有支撑板(21),所述支撑板(21)内部嵌设有旋转块(22),所述旋转块(22)与摄像头本体(19)顶部固定连接,所述外壳(20)顶部固定连接有定位杆(23),所述定位杆(23)外部滑动套设有外框(24),所述旋转块(22)顶部固定连接有转轴一(25),所述转轴一(25)位于外框(24)内部,所述转轴一(25)外部固定套设有齿轮(26),所述齿轮(26)后侧设有与其啮合连接的齿板(27),所述齿板(27)与外框(24)后侧内壁固定连接。
7.根据权利要求6所述的一种矿井下轨迹采集系统,其特征在于:所述外框(24)一侧固定连接有电动伸缩杆(28),所述电动伸缩杆(28)固定嵌设在外壳(20)一侧,所述外壳(20)一侧开设有通槽,所述外壳(20)前侧固定连接有电机一(29),所述电机一(29)输出轴固定连接有转轴二(30),所述转轴二(30)贯穿外壳(20),所述转轴二(30)外部固定连接有清洁刷(31),所述清洁刷(31)贯穿通槽。
8.根据权利要求7所述的一种矿井下轨迹采集系统,其特征在于:所述外壳(20)另一侧内壁固定连接有箱体(32),所述外壳(20)顶部固定连接有电机二(33),所述电机二(33)输出轴固定连接有转轴三(34),所述转轴三(34)底端延伸至箱体(32)内部,所述转轴三(34)底端外部固定套设有扇叶(35),所述箱体(32)底部以及外壳(20)另一侧固定嵌设有管道一(36),所述管道一(36)上固定嵌设有管道二(37),所述箱体(32)顶部开设有两个进风槽,所述外壳(20)顶部固定连接有安装架(38),所述安装架(38)内部开设有安装孔。
9.根据权利要求8所述的一种矿井下轨迹采集系统,其特征在于:所述旋转块(22)与支撑板(21)通过轴承连接,所述转轴二(30)与外壳(20)通过轴承连接,所述转轴三(34)与外壳(20)和箱体(32)通过轴承连接。
10.一种矿井下轨迹采集方法,适用于上述权利要求1-9任意一项所述的轨迹采集系统,具体步骤如下:
技术总结本发明公开了一种矿井下轨迹采集系统及方法,涉及轨迹采集技术领域,其技术方案是:包括:中央处理器,其用于保障系统的计算和运行;智能采集模块,其用于采集矿工行走的方向和距离,智能采集模块包括X轴记录模块、Y轴记录模块以及Z轴记录模块,本发明的有益效果是:通过智能采集模块、北斗定位模块、信号发射模块、信号接收模块、识别定位模块以及位置信息反馈模块的设计,可以多方式的获取矿工的行走数据信息,然后对多种方式获取的行走数据信息进行整合以得到矿工的行动轨迹,这样所采集的行动轨迹准确率高,即使北斗定位模块在进行北斗定位的时候出现信号差无信号的现象也不会影响采集的准确率。技术研发人员:赵先明,向阳,林昀受保护的技术使用者:北京红山信息科技研究院有限公司技术研发日:技术公布日:2024/8/27本文地址:https://www.jishuxx.com/zhuanli/20240830/282299.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。