基于神经网络的三坐标测量机动态误差补偿方法及系统与流程
- 国知局
- 2024-09-05 14:21:56
本发明涉及动态误差测量,更具体地说,本发明涉及基于神经网络的三坐标测量机动态误差补偿方法及系统。
背景技术:
1、三坐标测量机(coord i natemeasur i ngmach i ne,cmm)是工业领域发展最早的智能检测设备之一,具备较高的测量精度以及较好的环境适用性等优点,广泛应用于汽车装配、机械加工制造、精密仪器检测、航空航天等众多领域。随着计算机集成制造系统的发展,工业产品制造效率不断提高,对测量设备的测量周期以及保障产品质量的要求越来越迫切。为使测量设备满足工件测量高精度、高效率的需求,亟须寻找到解决测量速度与测量精度这对矛盾体的切入口,以保证测量稳定性,改善测量精度,提高测量效率。三坐标测量机动态误差补偿技术经过多年的发展,国内外已有众多学者对此进行了研究。
2、现有研究方向多集中于几何误差、热变形误差补偿,或只针对测量结果进行探讨,对于动态测量过程的动态特性分析研究较为匮乏。
3、为了解决上述问题,现提供一种技术方案。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明的实施例提供基于神经网络的三坐标测量机动态误差补偿方法及系统以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、基于神经网络的三坐标测量机动态误差补偿方法,包括如下步骤:
4、步骤s1,测量时引入测量误差,确定测量过程中三坐标测量机测量速度、加速度与动态误差的关系,确定多个动态误差参数;
5、步骤s2,采用高精度的测量仪器ap i激光跟踪测量系统建立动态误差分离实验平台;
6、步骤s3,为充分了解三坐标测量机沿x方向运动时动态参数误差变化特性,将滑架分别放在横梁的左中右3个方向,即分别研究y=0,250,500mm时x轴动态参数误差;
7、步骤s4,对动态误差参数影响因子进行分析,设定对比数据库,将动态误差参数与对比数据库进行对比;
8、步骤s5,将多个动态参数分别构造t-s网络模型,再根据t-s网络模型设定验证模型。
9、在一个优选的实施方式中,步骤s1中:
10、多个动态误差参数分别为加速后立即出现的最大定位误差mpe,加速度为0时出现的残余定位误差rpe,进入逼近距离时加速后立即出现的最大逼近误差mae,减速和测量完成之间的一些稳定时间后观察到的残余逼近误差rae,其中残余逼近误差可看作测量结果误差。
11、在一个优选的实施方式中,步骤s2中:
12、整个实验环境保持20℃恒温和固定的湿度,并且为保障激光跟踪测量系统测量精度,所有实验都是在激光器按照精度标准预热后实施,实验设定的测量参数如下:定位速度为40mm/s,定位加速度为200mm/s,定位距离为40mm,逼近速度为12mm/s,逼近加速度为60mm/s,逼近距离为10mm,重复上述测量方式多次并随机选取5次动态参数误差数据。
13、在一个优选的实施方式中,步骤s4中:
14、设计l18(2×37)正交阵列,每组实验用相同的参数值重复3次获取测量误差值,计算每组重复实验的最小值,最大值以及平均误差值,将平均值作为代表性数据。
15、在一个优选的实施方式中,步骤s4中:
16、记录在时间范围t1内发生的不同动态误差参数的数据缺失比例;
17、将不同动态误差参数的数据缺失比例标定为qi,i=1、2、3、4、……、n,n为正整数;
18、通过qi的标准差获取不同动态误差参数的数据缺失比例波动率,将qi的标准差标定为x1;
19、计算公式为:式中,为不同动态误差参数的数据缺失比例的平均值,x1为不同动态误差参数的数据缺失比例的标准差,通过不同动态误差参数的数据缺失比例的标准差获得不同动态误差参数缺失动态度;
20、记录在时间范围t2内发生的不同动态误差参数的数据缺失比例;
21、将不同动态误差参数的数据缺失比例标定为yi,i=1、2、3、4、……、m,m为正整数;
22、通过yi的标准差获取不同动态误差参数的数据缺失比例波动率,将yi的标准差标定为x2;
23、计算公式为:式中,为不同动态误差参数的数据缺失比例的平均值,x2为不同动态误差参数的数据缺失比例的标准差,通过不同动态误差参数的数据缺失比例的标准差获得不同动态误差参数缺失动态度;
24、通过将t2时间内获取的数据与t1时间内获取的数据进行对比,得到动态误差参数在不同时间段内的缺失动态度。
25、在一个优选的实施方式中,步骤s5中:
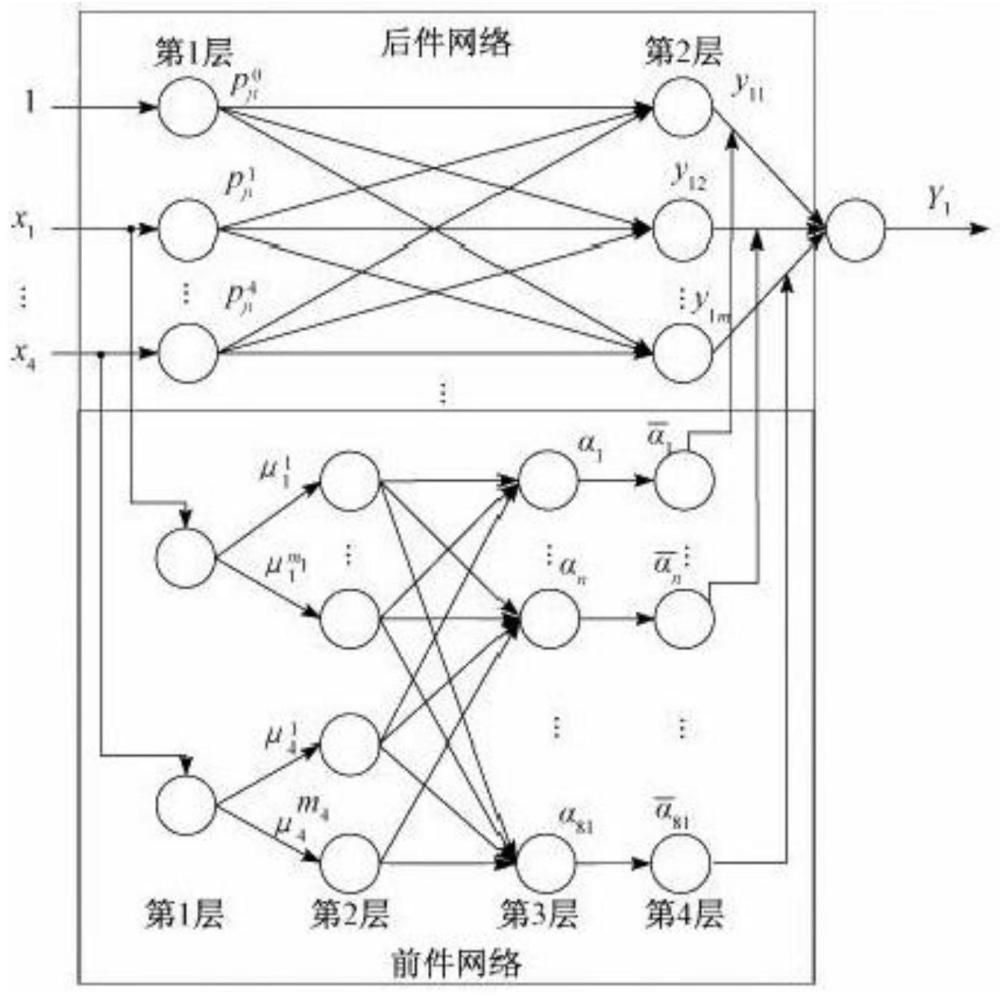
26、t-s网络模型包括前件网络和后件网络;
27、验证模型包括t-s网络模型,验证模型还包括动态数据参数数据库,通过验证模型对t-s网络模型中的动态参数进行验证。
28、在一个优选的实施方式中,前件网络共有4层网络组成,第1层为输入层,将输入量,即4个动态误差影响因子值x=[x1,x2,x3,x4]传输到下一层,共有4个结点;第2层为输入量的隶属度层,实现输入变量的模糊化,如负大,零,正大等,计算出模糊分量在各模糊集中的隶属度函数值;本发明设计的输入维度为4,xi的模糊分割数为3,隶属度函数使用高斯函数表达,本层结点数为n2=3×4=12;第3层为“与”层,该层结点数等于模糊规则数,用于计算每条规则的隶属度,采用乘积法或取小法,m=∏i=1mi=34=81,则本层结点数为n3=81;第4层为归一化层,结点数与前一层相同,即n4=81。
29、在一个优选的实施方式中,后件网络是r个并列子网络构成,每个子网络生成一个输出量,网络第1层为输入层,将输入变量传递到第2层,第1层的第0个结点输入值x0=1,为模糊规则后件提供常数项;第2层用于计算每条规则的后件,共有m个结点,每个结点表示一个模糊规则,即
30、
31、其中,pj为子网络的连接权值。
32、在一个优选的实施方式中,第3层为输出层,即y是各规则后件的加权和,加权系数为这个模糊规则归一化处理后的激活度,即前件网络的输出用作后件网络第3层的连接权值,经过训练辨识的参数为后件网络中的连接权值pj,隶属度函数的中心值cij和宽度σ,其中,j=1,2,…,m;i=1,2,3,4;
33、取误差函数为:
34、
35、式中:yd和y分别表示期望输出与实际输出,k为第k个数据;
36、参数辨识步骤如下:
37、步骤s51:随机设置网络结点连接权值pj,隶属度函数的中心值cij和宽度σ;
38、步骤s52:输入一定组数的训练样本数据开始训练,训练方式为:
39、
40、
41、
42、
43、式中:pji为第i个参数的j个子网络的连接权值,i=1,2,…,n;变量si=1,2,…,mi;β为学习率;
44、步骤s53:按照步骤s52循环迭代,判断误差值与设定值差别,若误差值达到预期精度,迭代训练结束,继续转入步骤s52。
45、基于神经网络的三坐标测量机动态误差补偿系统,包括动态误差参数确定模块、动态误差分离实验平台建立模块、动态参数误差变化特性模块、影响因子分析模块和t-s网络模型构造模块;
46、动态误差参数确定模块用于测量时引入测量误差,确定测量过程中三坐标测量机测量速度、加速度与动态误差的关系,确定多个动态误差参数;
47、动态误差分离实验平台建立模块用于采用高精度的测量仪器api激光跟踪测量系统建立动态误差分离实验平台;
48、动态参数误差变化特性模块用于为充分了解三坐标测量机沿x方向运动时动态参数误差变化特性,将滑架分别放在横梁的左中右3个方向,即分别研究y=0,250,500mm时x轴动态参数误差;
49、影响因子分析模块用于对动态误差参数影响因子进行分析,设定对比数据库,将动态误差参数与对比数据库进行对比;
50、t-s网络模型构造模块用于将研究的多个动态参数分别构造t-s网络模型。
51、本发明基于神经网络的三坐标测量机动态误差补偿方法及系统的技术效果和优点:
52、通过建立了误差分离平台分析移动桥式三坐标测量机测量过程动态特性,提取出4项动态误差参数(mpe、mae、rpe、rae)并验证了其有效性;通过对测量机测量过程的误差分析得出动态误差参数的4个主要影响因子,分别为定位速度、定位距离、逼近速度、逼近距离,采用正交实验探究了各个影响因素对4行项动态误差参数的影响程度,为建立动态误差补偿模型奠定了基础;将t-s模糊神经网络应用于三坐标测量机动态测量过程误差补偿,以4个影响因子为输入向量,4项动态误差参数作为输出建立动态误差模糊神经网络模型,验证了该模型具备良好的补偿效果,拓展了三坐标测量机动态误差补偿技术,为提高三坐标测量机动态精度与测量效率提供了保障。
本文地址:https://www.jishuxx.com/zhuanli/20240905/286024.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表