一种基于修正拉普拉斯算子融合三维光声信息的方法
- 国知局
- 2024-09-05 14:22:04
本发明涉及光声显微成像,具体是一种基于修正拉普拉斯算子融合三维光声信息的方法。
背景技术:
1、近年来,光声显微成像技术迅速发展,光声显微成像既有光学成像对比度高的优点,也兼具超声成像深度深的优点,因而广泛应用于生物医学成像领域。然而,光声显微成像也存在一些挑战:图像聚焦区域外的横向分辨率降低,成像景深较小等问题,限制了光声显微成像的临床应用。
2、现有技术中双照射光声显微成像等方法可以解决上述问题,但也大大增加了成本和光声显微成像系统的复杂性,且对传统光声显微成像系统的兼容性较差,因此不适用于传统光声显微成像系统。多焦点图像融合是一种将同一样本不同焦点下的多幅单焦点图像融合成一幅大景深图像的方法。该方法对于解决光声显微成像景深较小的问题,也有很大的潜力,并且在二维光声图像融合领域和光声层析成像领域已经表现出较好的效果。
3、但是,目前还没有人尝试将这种方法应用在三维光声信息融合领域,以解决光声显微成像景深较小的问题。因此,有必要研究出一种能兼容传统光声显微成像系统,以低成本方式实现三维光声信息融合的方法。
技术实现思路
1、本发明的目的在于针对现有技术的不足,提供一种基于修正拉普拉斯算子融合三维光声信息的方法,基于改进的离散修正拉普拉斯算子,对光声数据p进行聚焦测量,构建初始决策图;应用众数滤波和高斯滤波处理初始决策图,生成最终决策图,进而根据最终决策图,在不牺牲聚焦区域横向分辨率的情况下,得到融合后扩大了景深的光声数据。
2、为实现上述目的,本发明采用如下技术方案:
3、一种基于修正拉普拉斯算子融合三维光声信息的方法,包括以下步骤:
4、步骤s1、在虚拟光声显微系统中设置样品,用模拟高斯光束照射样品不同位置,通过模拟超声换能器采集三维光声信号,得到光声数据p1和p2;
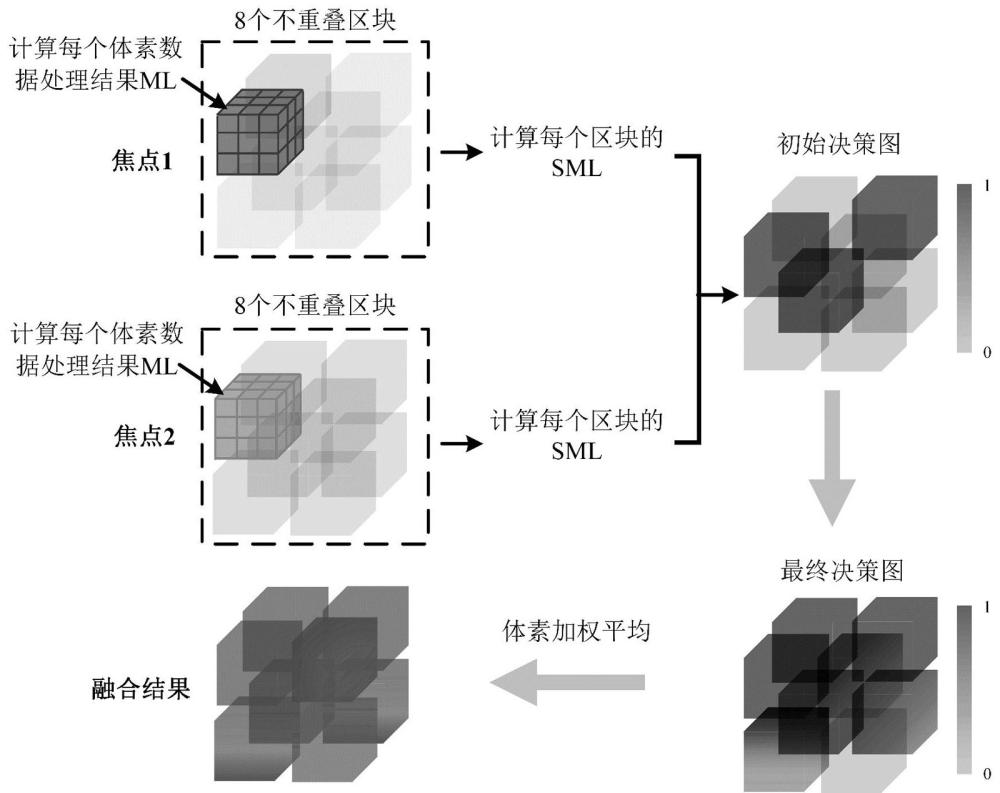
5、步骤s2、将步骤s1中所得光声数据p1和p2分别划分为一定数量、大小相同的不重叠区块,基于离散修正拉普拉斯算子,计算每个区块的聚焦程度,进而构建初始决策图;
6、步骤s3、采用基于众数滤波的一致性验证方法和高斯滤波处理初始决策图,以生成最终决策图;
7、步骤s4、基于最终决策图,通过体素加权平均计算出融合后的光声数据p3,得到三维光声信息融合结果。
8、具体的,步骤s1中所述虚拟光声显微系统的仿真环境设置如下:
9、透镜的数值孔径为0.14,高斯光束的波长为532nm,三维网格尺寸为120μm×120μm×120μm,单位三维网格的大小为2μm×2μm×3μm,样品周围介质为水,声速为1500m/s,超声换能器的中心频率为75mhz、带宽为67%。
10、具体的,步骤s2中所述将步骤s1中所得光声数据p1和p2分别划分为一定数量、大小相同的不重叠区块,每个区块的大小为(2n+1)3;
11、所述离散修正拉普拉斯算子,由于两个垂直方向的二阶导数的符号存在相反情况,在计算拉普拉斯算子对光声数据的处理结果时会相互抵消一部分,故需对拉普拉斯算子进行修正,用修正拉普拉斯算子处理光声数据p:
12、
13、对修正后的拉普拉斯算子作离散逼近处理,得到离散修正拉普拉斯算子。
14、进一步地,步骤s2中所述计算每个区块的聚焦程度,计算过程如下:
15、步骤s21、采用离散修正拉普拉斯算子处理光声数据p,计算每个体素数据的处理结果ml,所述光声数据p中坐标为(x,y,z)的光声数据处理结果mlp(x,y,z)表示为:
16、
17、上式中,ml表示光声信号的强度变化快慢;
18、步骤s22、将光声数据p1和p2分成相同数量大小为(2n+1)3的区块,每一个区块的聚焦程度sml为该区块内所有光声数据经离散修正拉普拉斯算子处理的结果之和,则光声数据p中第i个区块的聚焦程度表示为:
19、
20、上式中,第i个区块的中心为坐标(x,y,z)的光声数据。
21、更进一步地,步骤s2中通过比较光声数据p1和p2相同位置区块的聚焦程度大小,构建初始决策图idm,具体构建过程如下:
22、步骤s23、比较光声数据p1和p2相同位置区块的聚焦程度,将聚焦程度较大一方的区块识别为对应位置的聚焦区块,将聚焦程度较小一方的区块识别为对应位置的散焦区块;
23、步骤s24、选择聚焦区块的光声数据作为融合结果,对于相同位置区块,若p1区块的聚焦程度大于p2,即则选择p1中对应位置区块的光声数据作为融合结果,即idm(x,y,z)=1;若p1区块的聚焦程度小于p2,即则选择p2中对应位置区块的光声数据作为融合结果,即idm(x,y,z)=0;若光声数据p1和p2相同位置区块的聚焦程度相等,即则idm(x,y,z)=0.5;上述过程进一步表示为:
24、
25、上式中,idm(x,y,z)为初始决策图中坐标(x,y,z)处的光声数据。
26、具体的,步骤s3中所述采用基于众数滤波的一致性验证方法和高斯滤波处理初始决策图,处理过程如下:
27、步骤s31、采用基于众数滤波的一致性验证方法对初始决策图进行修正
28、在初始决策图中,若第i块的idm=1,即第i块对应位置的聚焦区块为p1中的区块,同时第i块相邻6个正交方向区块的idm=0,即这6个区块对应位置的聚焦区块为p2中的区块,则初始决策图中第i块的idm被修正为0;反之,若第i块的idm=0,即第i块对应位置的聚焦区块为p2中的区块,同时第i块相邻6个正交方向区块的idm=1,即这6个区块对应位置的聚焦区块为p1中的区块,则初始决策图中第i块的idm被修正为1;
29、步骤s32、对修正后的idm作高斯滤波处理以平滑图像,生成最终决策图fdm:
30、
31、
32、
33、上式中,s为idm中一个三维数据矩阵,矩阵中心的坐标为(x,y,z);g为初始决策图idm中(x,y,z)处数据的空间高斯分布函数;w为归一化因子。
34、具体的,步骤s4中所述基于最终决策图,通过体素加权平均计算出融合后的光声数据p3,体素加权公式为:
35、p3(x,y,z)=fdm(x,y,z)p1(x,y,z)+(1-fdm(x,y,z))p2(x,y,z)
36、上式中,fdm(x,y,z)为最终决策图中坐标(x,y,z)处的光声数据。
37、与现有技术相比,本发明具有以下有益效果:
38、本发明方法首先利用提出的离散修正拉普拉斯算子对同一样本不同焦点下的光声数据进行聚焦测量;之后采用基于众数滤波的一致性验证方法,对初始决策图中识别错误的区块的数据进行修正,并采用高斯滤波对图进行平滑处理,以减小融合过程中产生的块效应,平滑图像边界,生成最终决策图;最后基于最终决策图,通过体素加权平均计算得到融合后扩展了景深的光声数据。相较现有的双照射光声显微成像等方法优势在于,融合后能够将光声显微成像系统的景深扩大至原来的1.7倍,并且不会牺牲聚焦区域的横向分辨率,同时在噪声条件下也具有良好的性能,有助于传统光声显微成像系统以较低成本的方式获取高分辨率、大景深的光声图像。
本文地址:https://www.jishuxx.com/zhuanli/20240905/286045.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表