非视距建筑布局与目标位置联合估计方法、装置及产品
- 国知局
- 2024-09-05 14:22:35
本发明属于非视距探测,特别涉及一种非视距场景中的目标定位技术。
背景技术:
1、非视距探测是近年来雷达技术中的一个新兴研究领域。由于其能够利用电磁波衍射、反射和其他多径传播特性来感知隐藏目标,非视距目标探测技术在城市传感、自动驾驶和灾难救援被广泛使用。
2、一般而言,非视距场景中的目标定位方法可以分为两种类型,即多径识别和多径累积。多径识别的本质是在图像域中累积雷达获取的多径信息,从而提取目标的位置。2019年,s.li等人利用多输入多输出雷达构建了一个多径成像字典,并融合了不同路径的多径成像字典以获取目标图像(s.li,g.cui,s.guo,et al.,“nlos targets imaging with uwbradar,”in international conference on control,automation and informationsciences(iccais),2019,pp.1–5)。然而,上述方法会导致能量在多个路径上集中,同时也会导致一些不需要的噪声能量的聚集。相比之下,多径识别方法旨在识别回波中的不同多径信号,并借助多径信号之间的相关性来定位非视距目标。考虑到不同路径之间的角度关系,2022年,j.chen等人提出了一种结合到达方向和到达时间来实现nlos目标定位的方法(j.chen,s.guo,h.luo,et al.,“non-line-of-sight multi-target localizationalgorithm for driver assistance radar system,”ieee trans.veh.technol.,apr.2022)。然而,当前的方法主要依赖于对建筑布局的准确先验知识。当场景信息未知时,这些方法的定位性能可能会下降甚至定位失败。此外,现有方法大多数基于目标的距离信息,当场景中存在多个目标时,现有方法无法实现目标的准确定位。
技术实现思路
1、为解决上述技术问题,本发明提出一种基于多域关联的非视距建筑布局与目标位置联合估计方法、装置及产品,通过充分考虑多路径出发方向和到达方向关系,构建多路径识别策略,实现非视距多目标环境下的建筑布局和目标位置的准确估计。
2、本发明采用的技术方案之一为:一种基于多域关联的非视距建筑布局与目标位置联合估计方法,包括:
3、s1、获取雷达回波信号;
4、s2、基于非视距场景下的电磁传播特性,建立多径回波信号模型;
5、s3、分析不同类型多路径出发方向角度与到达方向角度关系,构建多路径识别策略;根据构建的多路径识别策略,基于步骤s1建立的多径回波信号模型,得到多路径识别结果;
6、s4、根据步骤s3获取的多路径识别结果,结合多路径到达时间信息,实现非视距建筑布局估计;
7、s5、基于步骤s4估计的建筑布局结果,结合路径角度信息,实现多个非视距目标位置估计。
8、本发明采用的技术方案之二为:一种计算机装置,包括存储器、处理器及存储在存储器上的计算机程序,所述处理器执行所述计算机程序以实现基于多域关联的建筑物布局和目标位置联合估计方法的步骤。
9、本发明采用的技术方案之三为:一种计算机可读存储介质,其上存储有计算机程序/指令,所述计算机程序/指令被处理器执行时以实现基于多域关联的建筑物布局和目标位置联合估计方法的步骤。
10、本发明采用的技术方案之四为:一种计算机程序产品,包括计算机程序/指令,所述计算机程序/指令被处理器执行时以实现基于多域关联的建筑物布局和目标位置联合估计方法的步骤。
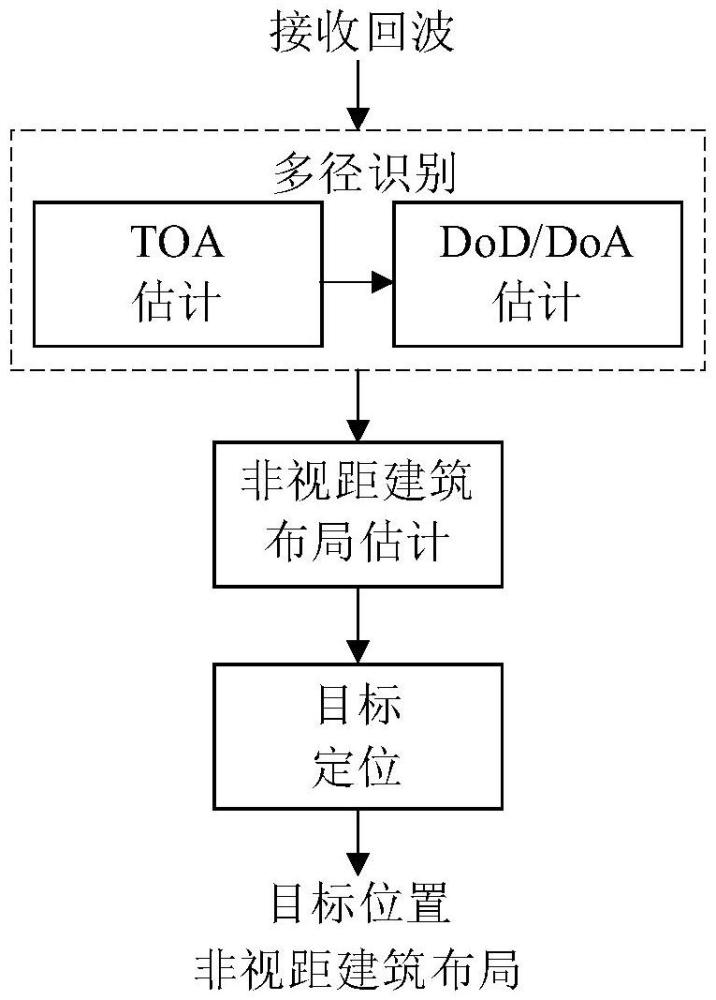
11、本发明的有益效果:本发明的一种基于多域关联的建筑物布局和目标位置联合估计方法,可实现非视距目标位置和建筑布局的准确估计。具体地,首先建立了多输入多输出雷达在多目标非视距场景下的多径回波模型。在此基础上,提出了一种充分考虑多路径出发方向和到达方向关系的路径识别策略。最后,根据识别结果,利用目标的角度和距离信息进行建筑布局估计和目标定位。所提方法处理流程见图1。本发明的方法具备以下优点:
12、1、所提路径识别策略可在非视距多目标环境下实现准确的多路径识别;
13、2、有效实现非视距环境下的遮蔽目标位置和建筑布局估计;
14、3、本发明可应用于自动驾驶、灾难救援等领域。
技术特征:1.一种基于多域关联的非视距建筑布局与目标位置联合估计方法,其特征在于,包括:
2.根据权利要求1所述的一种基于多域关联的非视距建筑布局与目标位置联合估计方法,其特征在于,步骤s3具体为:
3.根据权利要求2所述的一种基于多域关联的非视距建筑布局与目标位置联合估计方法,其特征在于,
4.根据权利要求3所述的一种基于多域关联的非视距建筑布局与目标位置联合估计方法,其特征在于,区分有效和无效的多径的过程为:
5.根据权利要求4所述的一种基于多域关联的非视距建筑布局与目标位置联合估计方法,其特征在于,步骤s4具体为:提出一种角度匹配算法,对步骤s2的多路径识别结果进行分类;包括以下过程:
6.根据权利要求5所述的一种基于多域关联的非视距建筑布局与目标位置联合估计方法,步骤s4具体为:借助角度信息和距离信息,定位由单调路径生成的多径鬼影。
7.一种计算机装置,包括存储器、处理器及存储在存储器上的计算机程序,其特征在于,所述处理器执行所述计算机程序以实现权利要求1所述方法的步骤。
8.一种计算机可读存储介质,其上存储有计算机程序/指令,其特征在于,所述计算机程序/指令被处理器执行时以实现权利要求1所述方法的步骤。
9.一种计算机程序产品,包括计算机程序/指令,其特征在于,所述计算机程序/指令被处理器执行时以实现权利要求1所述方法的步骤。
技术总结本发明公开非视距建筑布局与目标位置联合估计方法、装置及产品,应用于非视距探测技术领域,针对现有方法大多数基于目标的距离信息,当场景中存在多个目标时,现有方法无法实现目标的准确定位的问题;本发明基于多域信息提出了非视距建筑布局和目标位置联合估计方法。首先根据射线追踪准则,建立了非视距场景下的多目标多径回波模型。然后,基于不同类型多径信号的出射角和入射角之间的关系,构建了路径识别准则。最后,根据识别结果,利用目标的角度和距离信息实现建筑布局和目标位置估计。本发明能在非视距场景中实现目标位置和建筑布局的精确估计,且在低信噪比环境下仍能保持较高的定位精度。技术研发人员:郭世盛,徐子涵,陈家辉,邱晨,薛舒程,朱智豪,吴佩仑,崔国龙,孔令讲,杨晓波受保护的技术使用者:电子科技大学技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/286099.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。