基于能量优化非线性粒子群的无人矿卡全局路径规划方法
- 国知局
- 2024-09-05 14:22:20
本发明涉及车路协同,尤其涉及一种基于能量优化非线性粒子群的无人矿卡全局路径规划方法。
背景技术:
1、随着无线通信技术的不断深入,对于无人驾驶矿卡在安全、耗能、工作效率、矿卡司机的工作负荷程度等方面有了新的追求。现实露天矿区的开采伴随着大量的矿石运输,且花费在运输方面的成本在矿山总投资中占有很大比例。由于无人驾驶矿卡具有安全性高、低成本、生产效率高以及抗环境干扰能力强等优点,故采用无人驾驶矿卡进行矿石运输可以降低运输成本,提高运输的安全性,是一种实现安全生产和降低投入的双线并行的运营方式。而想要实现无人驾驶矿卡的落地实施,如何做好无人驾驶矿卡的全局路径规划至关重要,合理的全局路径规划可以进一步提升无人驾驶矿卡的运输效率。无人驾驶矿卡所需的现有技术包括无人驾驶、无线通信和车路协同技术。而将现有的车路协同技术应用于无人驾驶矿卡的全局路径规划时,无法做到以消耗更低能量为前提进行全局路径规划。
技术实现思路
1、针对上述现有技术的不足,本发明利用车路协同技术的辅助,提出了一种基于能量优化非线性粒子群的无人矿卡全局路径规划方法,在一定程度上改善了无人矿卡的成本、用工、安全等方面的问题。
2、本发明提出的一种基于能量优化非线性粒子群的无人矿卡全局路径规划方法,该方法包括以下步骤:
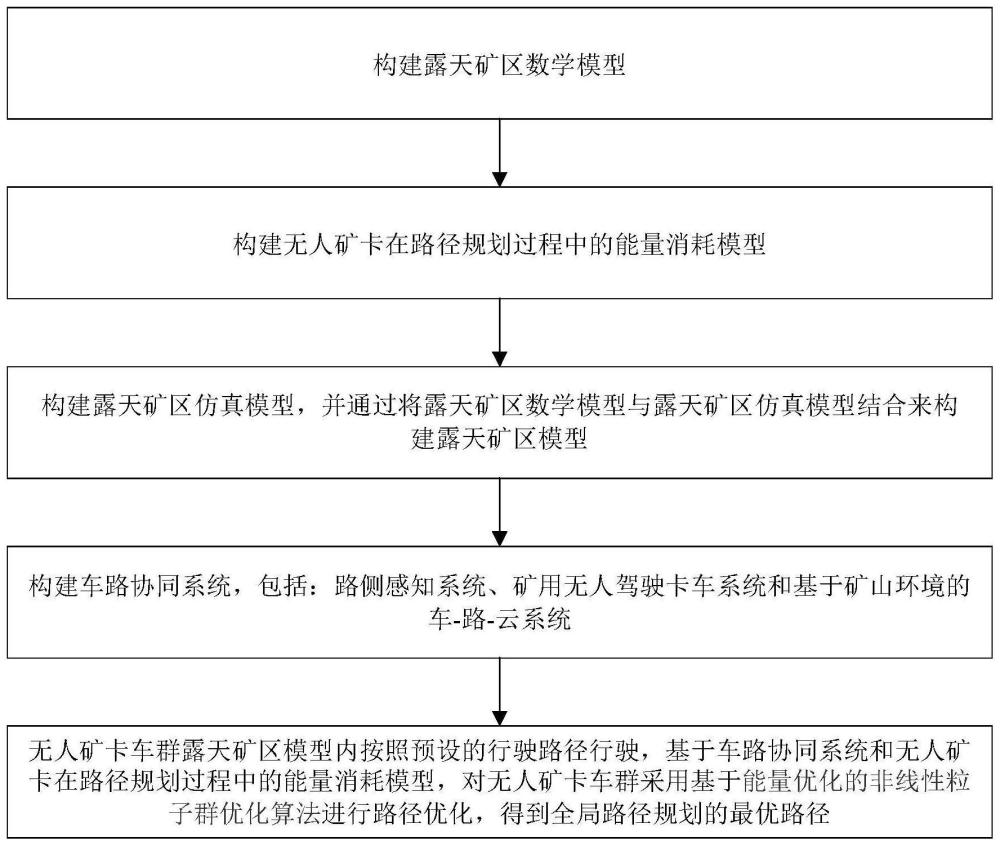
3、步骤1:构建露天矿区数学模型;
4、步骤2:构建无人矿卡在路径规划过程中的能量消耗模型;
5、步骤3:构建露天矿区仿真模型,并通过将露天矿区数学模型与露天矿区仿真模型结合来构建露天矿区模型;
6、步骤4:构建车路协同系统,包括:路侧感知系统、矿用无人驾驶卡车系统和基于矿山环境的车-路-云系统;
7、步骤5:无人矿卡车群露天矿区模型内按照预设的行驶路径行驶,基于车路协同系统和无人矿卡在路径规划过程中的能量消耗模型,对无人矿卡车群采用基于能量优化的非线性粒子群优化算法eng-pso进行路径优化,得到全局路径规划的最优路径;
8、所述露天矿区数学模型的构建方法包括:设置无人矿卡的总数量为k,假设无人矿卡全部满载且不考虑其他情况,仅考虑无人矿卡本身的质量和速度;设置露天矿区装载点的总量为m,卸载点的总量为l,将所有无人矿卡从某个装载点装载完毕后再运输到某个卸载点卸载完毕的过程作为一次完整的路径规划过程,并计算整个路径规划过程中的运输总费用,包括:燃油费用、无人矿卡维修费用和网络基站建设维修费用;
9、所述燃油费用与无人矿卡自身重力和克服阻力做功呈正相关;
10、所述无人矿卡维修费用cw为:
11、
12、其中px为一辆无人矿卡维修的平均费用;r表示整个运输过程中无人矿卡经过的装载点总数;i表示整个运输过程中无人矿卡经过的第i个装载点,且i=1,2,3…r;l表示整个运输过程中无人矿卡经过的卸载点总数;j表示整个运输过程中无人矿卡经过的第j个卸载点,且j=1,2,3,…l;n为投入到该运输过程中的无人矿卡的总数量,且n=1,2,3…k;
13、所述网络基站建设维修费用为:
14、cp=a×(pw+lnt)
15、其中cp代表整个运输过程中网络基站建设维修的费用;a表示已完成从装载点到卸载点的一次完整运输过程的车辆总数;pw代表单个无人矿卡完成一次完整运输所需的网络基站维修费用;t为无人矿卡完成一次完整运输的平均时长;
16、所述步骤2进一步包括:
17、步骤2.1:计算无人矿卡克服自身重力做功;
18、ws=gs×g×∑h×sinθ
19、其中ws表示无人矿卡在路径规划过程中克服自身重力做功;gs表示无人矿卡的自身重量;g为重力系数,且g=9.8n/kg;∑h代表无人矿卡在整个运输路径中爬坡的总距离;sinθ为道路坡度角θ的正弦值;
20、步骤2.2:计算无人矿卡克服阻力做功;
21、wf=fs+fu+fp
22、其中wf表示无人矿卡在路径规划过程中克服阻力做功;fs代表无人矿卡行驶过程中克服路面阻力做功;fu代表无人矿卡行驶过程中克服空气阻力做功;fp代表无人矿卡行驶过程中克服坡度阻力做功;且有:
23、fs=gs×μ×g×∑l
24、fu=(c×s×v2)×gs×∑l/2
25、fp=∑gs×g×∑l sinθ
26、其中μ为路面质量阻力系数;∑l表示无人矿卡在路径规划过程中行驶的总长度;c为空气阻力系数;s为无人矿卡的迎风面积;v为无人矿卡的平均行驶速度;
27、步骤2.3:根据无人矿卡克服自身重力做功和无人矿卡克服阻力做功计算无人矿卡在路径规划过程中消耗的总能量;
28、w=ws+wf
29、其中w为无人矿卡在路径规划过程中消耗的总能量;
30、步骤3中所述露天矿区仿真模型的构建方法为:获取露天矿区的地形数据和地质数据并进行数据处理,根据处理后的地形数据构建地形模型,根据处理后的地质数据构建地质模型,将地形模型和地质模型进行结合并可视化,得到露天矿区仿真模型;
31、所述路侧感知系统,用于通过设置的路侧传感器采集路面状况信息;用于对道路上行驶的无人矿卡进行信息采集以获取交通流信息,并与无人矿卡进行信息交流;还作为矿用无人驾驶卡车系统与基于矿山环境的车-路-云系统进行信息交互的媒介;
32、所述路侧感知系统以设定的间距设置在道路两侧;
33、所述矿用无人驾驶卡车系统,用于采集无人矿卡的状态信息和行驶过程中的环境信息并传输至基于矿山环境的车-路-云系统;
34、所述基于矿山环境的车-路-云系统,用于处理来自路侧感知系统rsu和矿用无人驾驶卡车系统的数据信息;
35、所述矿用无人驾驶卡车系统,包括:车载无人驾驶系统vap、通信管理子系统dcs与地面管理子系统gms;
36、所述车载无人驾驶系统vap,用于通过设置的车载传感器感知无人矿卡周围的环境状况;用于通过车辆can总线感知无人矿卡的状态信息,并利用感知到的信息对无人矿卡进行路径规划;同时接收来自地面管理子系统gms的命令;
37、所述通信管理子系统dcs,用于作为车载无人驾驶系统vap与地面管理子系统gms进行信息交流的媒介,并通过无线通信技术实现车载无人驾驶系统vap与地面管理子系统gms之间的信息传递;
38、所述地面管理子系统gms,用于实时接收来自车载无人驾驶系统vap和通信管理子系统dcs的信息,实时监控无人矿卡的工作状态并根据来自车载无人驾驶系统vap的信息向车载无人驾驶系统vap发送指令;
39、所述步骤5进一步包括:
40、步骤5.1:将无人矿卡车群作为粒子群,对粒子群进行初始化,并设置非线性惯性权重因子w′、非线性个体学习因子c′1、非线性群体学习因子c′2、粒子速度最大值的限定以及粒子的搜索边界;
41、步骤5.2:设置初始值为1的变量t,用于累计粒子群的迭代次数;
42、步骤5.3:基于无人矿卡在路径规划过程中的能量消耗模型,定义能量评估代价函数并作为代价函数,并计算粒子群中每个粒子的代价函数值;
43、步骤5.4:根据代价函数值,更新每个粒子的个体最优值和粒子群的群体最优值,并将每个粒子的个体最优值作为该粒子代表的无人矿卡优化后的行驶路径,将粒子群的群体最优值作为无人矿卡车群优化后的路径规划结果;
44、步骤5.5:判断代价函数值是否收敛,若收敛,则输出能耗最低的全局路径规划结果和迭代次数t;若不收敛则更新每个粒子当前的位置矢量和速度矢量,将变量t的数值加一,重复步骤5.3-步骤5.4,直至代价函数值收敛为止;
45、步骤5.1中所述初始化的方法为:为粒子群中的每一个粒子设置一个初始速度和初始位置;
46、所述非线性惯性权重因子为w′:
47、
48、其中γ表示超参数,且取值为实数,用于控制eng-pso算法进行全局搜索或局部搜索;k表示当前迭代次数;k′表示迭代总次数;θ为无人矿卡当前位置的道路坡度角;wmax表示惯性权重因子的最大值;wmin表示惯性权重因子的最小值;
49、所述非线性个体学习因子c′1为:
50、
51、其中b1为边界限制因子;σ为控制因子;
52、所述非线性群体学习因子c′2为:
53、
54、其中b2为边界限制因子;
55、步骤5.3中所述能量评估代价函数为:
56、
57、其中表示进行第k次迭代时无人矿卡实际剩余的能量;表示第s个粒子的第k次迭代过程;z(x)表示无人矿卡携带的总能量;表示无人矿卡的实际消耗能量,且有:
58、
59、其中g为重力;hs为无人矿卡在行驶途中爬坡的高度;f为空气阻力;u表示次数;u表示无人矿卡行驶时爬坡的次数;l′为无人矿卡行驶在水平路径上的距离;l″为无人矿卡爬坡的距离;z为无人矿卡避开障碍物的次数;l″′表示无人矿卡避开障碍物行驶的距离;
60、其中重力g和重力f如下所示:
61、g=mg
62、f=cpsv2/2
63、其中m为无人矿卡满载时的重量;p为空气密度;
64、步骤5.5中所述更新每个粒子当前的位置矢量和速度矢量的方法为:将投入运输过程的n辆无人矿卡作为一个包含n个粒子的种群n,将种群n记为h表示种群n中的第h个粒子;在粒子群算法中生成的路径由m个潜在的离散控制点组成,则在第k次迭代过程中,粒子的速度更新公式和位置更新公式如下所示:
65、
66、
67、其中代表粒子h在第k+1次迭代中的速度矢量;代表粒子h在第k次迭代中的速度矢量;rand(a)和rand(b)均为随机数;和分别代表粒子h在第k次迭代过程中的个体最优值和粒子h对应的群体最优值;代表粒子h在第k次迭代中的位置矢量;代表粒子h在第k+1次迭代中的位置矢量。
68、采用上述技术方案所产生的有益效果在于:
69、本发明方法在车路协同技术的辅助下,通过车路协同系统构建了车-路-云运输系统,保证了矿山内进行信息交互的实时性和准确性,提高了无人矿卡的工作效率。
70、本发明方法提出一种基于能量优化的非线性粒子群优化算法(energyoptimization nonlinear particle swarm optimization algorithm,eng-pso)算法,该算法通过将惯性因子和学习因子由线性变换改为非线性变换,使该算法能够自适应地在全局路径规划与局部路径规划之间进行选择。在使用eng-pso算法进行全局路径规划时,可以保证得出的路径耗能最低,从而降低了无人矿卡的运输成本。
本文地址:https://www.jishuxx.com/zhuanli/20240905/286073.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表