一种基于转角偏离检测的线弧结合式移动目标轨迹分段压缩方法及装置
- 国知局
- 2024-09-05 14:25:48
本发明涉及数据处理,尤其涉及一种基于转角偏离检测的线弧结合式移动目标轨迹分段压缩方法及装置。
背景技术:
1、随着传感定位和移动通信技术水平的不断提升,移动目标位置数据来源也日趋广泛。移动目标在某个时间段内一系列带有时间戳的位置数据集合可以描述为目标运动轨迹,目标运动轨迹对于理解人类活动、交通状况、动物迁徙、生态环境等不同领域问题具有重要价值。
2、移动目标轨迹分段压缩是大数据条件下轨迹数据分析挖掘必要的前序和基础工作,通过科学合理地简化轨迹,提升轨迹数据分析挖掘的质量和效率。轨迹分段压缩方法可以分为三类:基于线段简化的轨迹分段压缩、基于路网结构的轨迹分段压缩以及基于语义信息的轨迹分段压缩。基于线段简化的轨迹分段压缩是将自由空间中的目标轨迹进行线性近似分段,仅存储各个近似线段的端点,最终形成完整折线替代原始轨迹。基于路网结构的轨迹分段压缩主要针对依托道路行进的车辆、行人等目标,由于存在交通路网约束,目标轨迹可进行地图匹配,从而将位置信息映射到路网上,通过路网结构和路段编码来表示原始轨迹以减小数据量。基于语义信息的轨迹分段压缩主要面向带有丰富附加信息的语义轨迹,从轨迹数据中提取反映移动目标自身属性或行为活动的语义特征,如目标运动过程中的停留点、加减速点等,之后将轨迹转化为语义序列以实现数据压缩。
3、三类轨迹分段压缩方法中,基于线段简化的轨迹分段压缩应用最早,由于不涉及目标运动的地理约束,也不需要附加额外信息支持压缩,适用范围相对更为广泛。然而,现有基于线段简化的轨迹分段压缩方法在处理高自由度活动目标轨迹时,尤其是海空目标轨迹,存在难以有效降低数据压缩率的情况。分析原因,主要是该类目标运动约束少,轨迹中常会出现近似弧形轨迹段,而线段简化分段压缩为保持压缩轨迹与原始轨迹的整体相似性,往往需要在弧段轨迹部分保留较多分段特征点以实现压缩轨迹的较好贴合,从而导致分段精度与压缩率的矛盾问题更加凸显。
技术实现思路
1、为解决上述技术问题,本发明提出了一种基于转角偏离检测的线弧结合式移动目标轨迹分段压缩方法,所述方法包括:
2、步骤s1:获取待压缩移动目标轨迹,所述待压缩移动目标轨迹是所述移动目标在自由地理空间运动形成的轨迹,在多维度数据空间下,所述待压缩移动目标轨迹是有序的点的集合,表示为tra={p1,...,pi,...,plen},1≤i≤len,式中pi是包含多维信息的轨迹点,len是轨迹长度,即所述移动目标轨迹所包含的点数,轨迹点pi=(xi,yi,ti,wi),其中xi和yi是轨迹点pi的坐标,ti是轨迹点pi的记录时刻,yi是轨迹点pi的特征信息集合;定义所述待压缩移动目标轨迹的轨迹段,所述轨迹段是所述待压缩移动目标轨迹对应的轨迹点组成的集合中,由若干连续轨迹点组成的子集,表示为式中是轨迹段的特征信息,如果不存在特征信息则所述轨迹段对应的子集中省略pu和pv是轨迹段的两个端点,轨迹段的长度是v-u+1;获取所述待压缩移动目标轨迹的全部轨迹段;结合所述移动目标的运动方向,每个轨迹段用其两个端点对应的向量进行表示,按所述移动目标的运动方向依次对各个轨迹段的端点进行编号,形成待压缩移动目标轨迹tra对应的向量集
3、步骤s2:将向量集中每两个相邻的向量的夹角作为转角,结合相邻的两个向量的方向,确定各个转角的转角符号,所述转角符号为正号或负号;生成所述待压缩移动目标轨迹对应的带转角符号的转角集;
4、步骤s3:对所述带转角符号的转角集进行中值滤波,对滤波后转角集中每两个相邻元素确定相似性,从滤波后转角集中获取q个转角子集,每个转角子集中包括滤波后转角集中连续的numq1个元素,1≤q1≤q;每个转角子集中,每两个相邻元素的相似性均大于预设阈值;其中,转角子集中的每个元素对应向量集ψ中相邻的两个向量,将转角子集对应的全部向量对应的轨迹点所形成的轨迹段,作为所述待压缩移动目标轨迹的近似弧段;基于全部转角子集,确定所述待压缩移动目标轨迹中的全部近似弧段;所述待压缩移动目标轨迹移除各个近似弧段后,余下若干个剩余轨迹段;
5、步骤s4:对各个近似弧段进行压缩及唯一性压缩表示,对各个剩余轨迹段进行线性压缩;基于所述待压缩移动目标轨迹中各个近似弧段的压缩结果及各个剩余轨迹段的压缩结果,生成所述待压缩移动目标轨迹的压缩结果。
6、优选地,所述步骤s2,将向量集中每两个相邻的向量的夹角作为转角,结合相邻的两个向量的方向,确定各个转角的转角符号,所述转角符号为正号或负号;生成所述待压缩移动目标轨迹对应的带转角符号的转角集,包括:
7、步骤s21:对向量集中每两个相邻的向量,均执行以下操作:
8、将相邻的两个向量对应的端点分别记为pi,pj,pk,则线段pipj,pjpk,pkpi对应三角形的边,长度分别为lij,ljk,lki,利用反三角函数中的反余弦求出线段pipj与pjpk的夹角γ
9、γ=arccos((lij2+ljk2-lij2)/(2lijljk)),lij,ljk>0,0≤γ≤π
10、将结合了转角符号的转角表示为θ,则θ表示为
11、
12、基于θ的数值确定各个转角的转角符号;
13、步骤s22:生成所述待压缩移动目标轨迹对应的带转角符号的转角集,记为γ={θ1,θ2,...,θlen-2}。
14、优选地,所述步骤s3,对所述带转角符号的转角集进行中值滤波,包括:
15、对所述带转角符号的转角集γ={θ1,θ2,...,θlen-2}中的每个元素θm均进行中值滤波,中值滤波后形成滤波后转角集φ={θ′1,...,θ′m,...,θ′len-2},1≤m≤len-2;
16、其中,中值滤波公式为:
17、
18、其中,θ1,θlen-2分别为带转角符号的转角集γ的第m-lmf/2、m+lmf/2、1、len-2个元素,lmf是中值滤波邻域长度,一般设为偶数,med代表对数据集取中值。
19、优选地,所述步骤s4,其中,对各个近似弧段进行压缩及唯一性压缩表示,包括:
20、获取一个未压缩的近似弧段,确定所述近似弧段对应的轨迹段,确定所述轨迹段拟合为圆弧后对应的圆心o、半径r,获取所述轨迹段对应的起点、终点、圆心、转角符号,所述轨迹段对应的起点、终点、圆心、转角符号组成的集合作为所述近似弧段的第一压缩结果;所述第一压缩结果结合所述近似弧段的方向,作为所述近似弧段的唯一性压缩表示。
21、优选地,所述步骤s4,其中,所述步骤s4,其中,对各个剩余轨迹段进行线性压缩,包括:
22、获取一个未压缩的剩余轨迹段,设置距离阈值ddp,连接所述未压缩的剩余轨迹段的首尾两点形成首尾连线,若所述剩余轨迹段中除首尾两点外的其余轨迹点到所述首尾连线的距离均小于距离阈值ddp,则由首尾两点代表所述剩余轨迹段,首尾两点作为所述剩余轨迹段的线性压缩结果;否则,对首尾连线经多次迭代的方式分段,分段方式是将距离所述首尾连线距离最大的轨迹点作为分段特征点,将首尾两点分别与所述分段特征点相连,形成多个新的首尾连线,直至各个新的首尾连线除首尾两点外的其余轨迹点到所述新的首尾连线的距离均小于距离阈值ddp,将各个所述新的首尾连线的首点、尾点组成的集合作为所述剩余轨迹段的线性压缩结果。
23、本发明提供一种基于转角偏离检测的线弧结合式移动目标轨迹分段压缩装置,所述装置包括:
24、数据处理模块:配置为获取待压缩移动目标轨迹,所述待压缩移动目标轨迹是所述移动目标在自由地理空间运动形成的轨迹,在多维度数据空间下,所述待压缩移动目标轨迹是有序的点的集合,表示为tra={p1,...,pi,...,plen},1≤i≤len,式中pi是包含多维信息的轨迹点,len是轨迹长度,即所述移动目标轨迹所包含的点数,轨迹点pi=(xi,yi,ti,wi),其中xi和yi是轨迹点pi的坐标,ti是轨迹点pi的记录时刻,yi是轨迹点pi的特征信息集合;定义所述待压缩移动目标轨迹的轨迹段,所述轨迹段是所述待压缩移动目标轨迹对应的轨迹点组成的集合中,由若干连续轨迹点组成的子集,表示为式中是轨迹段的特征信息,如果不存在特征信息则所述轨迹段对应的子集中省略pu和pv是轨迹段的两个端点,轨迹段的长度是v-u+1;获取所述待压缩移动目标轨迹的全部轨迹段;结合所述移动目标的运动方向,每个轨迹段用其两个端点对应的向量进行表示,按所述移动目标的运动方向依次对各个轨迹段的端点进行编号,形成待压缩移动目标轨迹tra对应的向量集
25、转角模块:配置为将向量集中每两个相邻的向量的夹角作为转角,结合相邻的两个向量的方向,确定各个转角的转角符号,所述转角符号为正号或负号;生成所述待压缩移动目标轨迹对应的带转角符号的转角集;
26、中值滤波模块:配置为对所述带转角符号的转角集进行中值滤波,对滤波后转角集中每两个相邻元素确定相似性,从滤波后转角集中获取q个转角子集,每个转角子集中包括滤波后转角集中连续的numq1个元素,1≤q1≤q;每个转角子集中,每两个相邻元素的相似性均大于预设阈值;其中,转角子集中的每个元素对应向量集ψ中相邻的两个向量,将转角子集对应的全部向量对应的轨迹点所形成的轨迹段,作为所述待压缩移动目标轨迹的近似弧段;基于全部转角子集,确定所述待压缩移动目标轨迹中的全部近似弧段;所述待压缩移动目标轨迹移除各个近似弧段后,余下若干个剩余轨迹段;
27、压缩模块:配置为对各个近似弧段进行压缩及唯一性压缩表示,对各个剩余轨迹段进行线性压缩;基于所述待压缩移动目标轨迹中各个近似弧段的压缩结果及各个剩余轨迹段的压缩结果,生成所述待压缩移动目标轨迹的压缩结果。
28、本发明提供一种电子设备,述电子设备包括:
29、至少一个处理器;以及
30、与所述至少一个处理器通信连接的存储器;其中,
31、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如前所述的方法。
32、本发明提供一种存储有计算机指令的非瞬时计算机可读存储介质,所述计算机指令用于使所述计算机执行如前所述的方法。
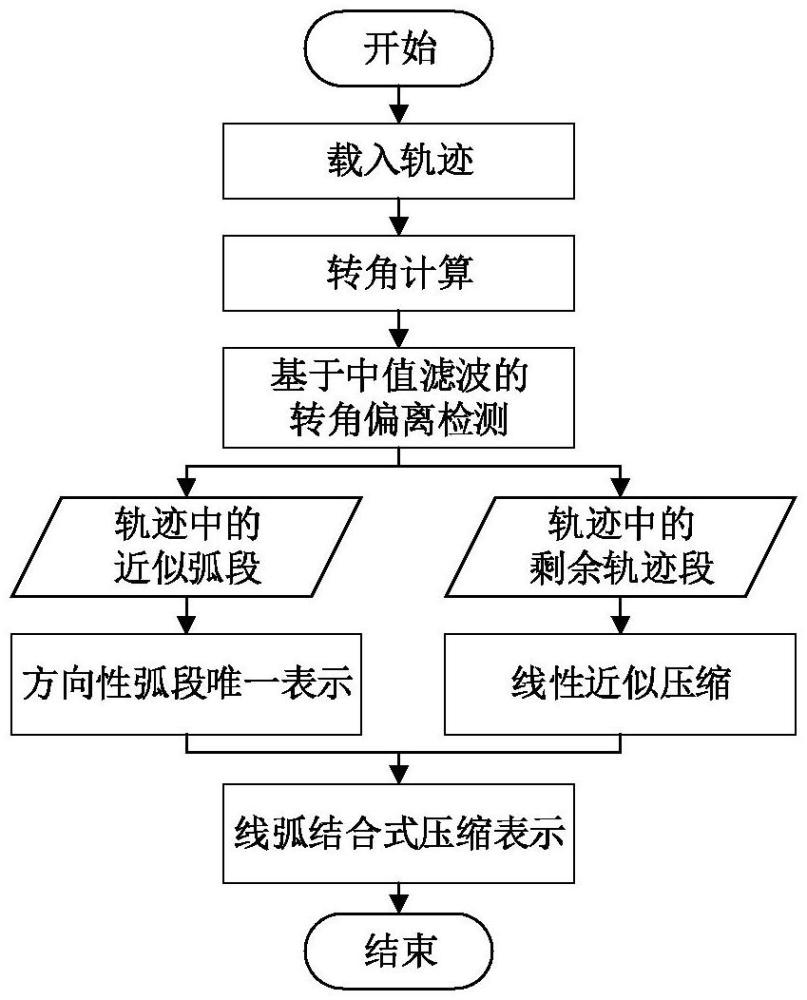
33、本发明的方法,针对包含多弧段的高自由度活动目标轨迹,以优化处理近似弧段带动整体压缩率降低为基本考虑,提出一种基于转角偏离检测的线弧结合式移动目标轨迹分段压缩方法。首先,建立方向性弧段轨迹的唯一性表示,基于中值滤波的转角偏离检测准确提取轨迹中的近似弧段,并基于唯一性表示实现近似弧段的压缩优化。然后,对近似弧段之外的剩余轨迹段,实施线段简化分段压缩。最后,综合弧段简化结果形成完整压缩表示,实现线弧结合式轨迹分段压缩。基于转角偏离检测的线弧结合式移动目标轨迹分段压缩方法解决了多弧段轨迹数据集分段压缩优化的问题,具有轨迹分段精度良好保持下进一步降低数据压缩率的技术效果。
34、应当理解,技术实现要素:部分中所描述的内容并非旨在限定本公开的实施例的关键或重要特征,亦非用于限制本公开的范围。本公开的其它特征将通过以下的描述变得容易理解。
本文地址:https://www.jishuxx.com/zhuanli/20240905/286433.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。