一种基于磁场的输电线路舞动状态建模及检测方法
- 国知局
- 2024-09-05 14:25:51
本发明涉及一种基于磁场的输电线路舞动状态建模及检测方法,属于电力系统输电线路测量。
背景技术:
1、输电线路舞动是一种低频、大振幅、风致振荡,多发生在雨雪大风等天气条件下。严重情况下,输电线路舞动会造成输电故障,例如由于线间间隙违规引起的闪络、输电塔机械应力过大引起的装置损坏等,极端情况下还会导致停电和塔架永久性损坏。为了制定输电线路故障的有效预防与保护措施,实现电力系统安全稳定运行,检测输电线路的舞动状态成为重要技术手段。
2、目前,针对输电线缆舞动的检测方法有:(1)无人机拍照技术:利用无人机巡航拍照,之后采用图像处理技术检测线缆弧垂。(2)传感技术:在输电线缆上安装多个加速度传感器,通过线路加速度参数求解出运动位移,进而求解线路舞动变化。(3)全球定位系统(global positioning system,gps):采用gps定位输电线缆上各点的空间位置,从而检测线路舞动姿态。其中,无人机拍照技术受天气和环境干扰因素太大,无法在雨雪天气下进行检测,而且采集照片后通过图像处理技术识别线缆状态属于离线检测,不能实时对线缆状态进行检测;传感技术需要在线路上分段安装大量传感器,价格昂贵,无法大规模实施;而采用gps定位系统检测线路空间位置时检测精度较低。总之,目前对于输电线路舞动检测技术还有待进行更加深入的研究。
技术实现思路
1、本发明所要解决的技术问题是:提供一种基于磁场的输电线路舞动状态建模及检测方法,实现输电线路舞动角度的非接触检测,通过将磁传感器安装在输电塔架上,对采集的磁场数据进行处理得到舞动角度。
2、本发明为解决上述技术问题采用以下技术方案:
3、一种基于磁场的输电线路舞动状态建模及检测方法,包括如下步骤:
4、步骤1,在每个输电塔架的三个不同位置安装磁性传感器,在三维直角坐标系下,建立输电线路静止状态下的悬链线方程,当输电线路舞动θ角度后,根据坐标变换得到输电线路在等高悬挂点情况下绕悬挂点舞动的数学模型;
5、步骤2,联立输电线路舞动数学模型与毕奥沙伐尔电磁方程,将电流微元idl分解到三维直角坐标系,得到三维直角坐标系x、y和z轴分量,建立输电线路舞动状态下的磁场模型;
6、步骤3,根据输电线路舞动状态下的磁场模型,在线路电流和悬链线系数已知情况下,输电线路空间磁场与舞动角度之间存在映射关系,通过利用磁性传感器采集输电线路空间磁场,求解映射关系得到线路舞动角度。
7、作为本发明的一种优选方案,所述步骤1中,在每个输电塔架的三个不同位置安装磁性传感器具体为:在a相、b相线路正下方均安装一个磁性传感器,最后一个磁性传感器安装在a相和c相线路中间位置。
8、作为本发明的一种优选方案,所述步骤1中,在三维直角坐标系下,建立输电线路静止状态下的悬链线方程,当输电线路舞动θ角度后,根据坐标变换得到输电线路在等高悬挂点情况下绕悬挂点舞动的数学模型,具体过程如下:
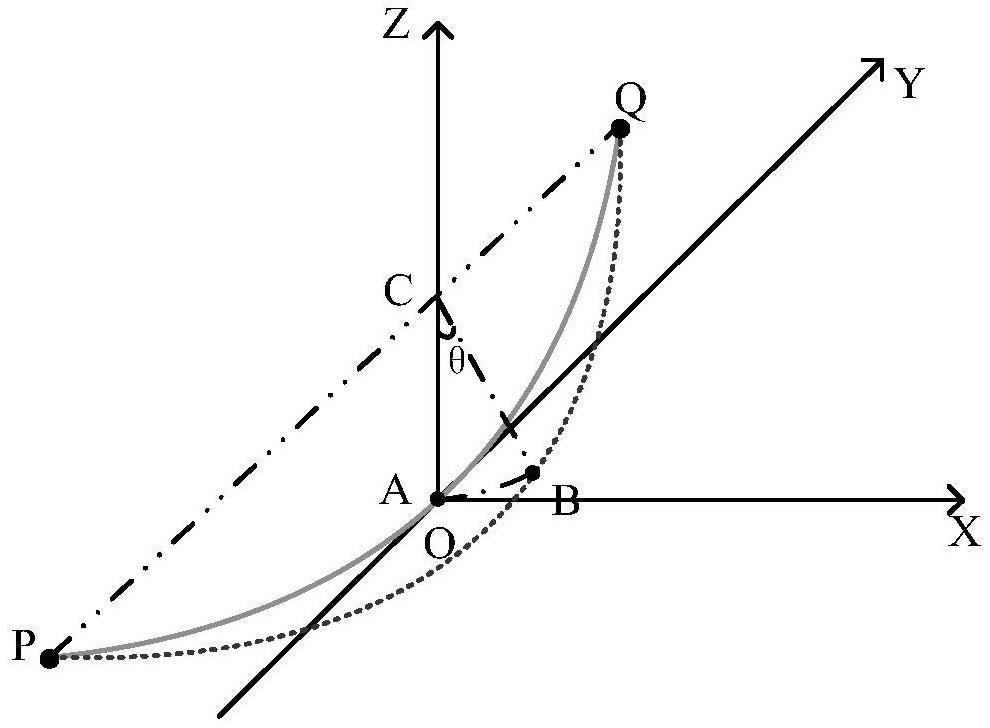
9、选取地面为xoy平面,与地面垂直且经过两杆塔中心轴线的平面为zoy平面,选择线缆弧垂最低点为原点o,输电线路静止状态位于zoy平面,沿x轴方向进行摆动,p、q为线缆两端等高悬挂点,线缆绕pq轴线摆动,a点为线缆上任意一点,c点为a点在pq轴线的投影点,a点绕c点逆时针旋转θ角度后形成b点,则a点坐标满足悬链线方程:
10、
11、xa=0
12、式中,α表示悬链线系数,(xa,ya,za)为a点坐标;
13、设定c点坐标为(0,0,zc),通过坐标变换得到旋转θ角度后输电线路的曲线方程为:
14、
15、式中,(xb,yb,zb)为b点坐标;
16、对曲线方程进行化简和坐标平移,得到三维直角坐标系下输电线路舞动数学模型为:
17、
18、式中,zc的大小等于弧垂s,h为输电杆塔高度,l为档距,(x,y,z)为输电线路任意一点空间坐标。
19、作为本发明的一种优选方案,所述步骤2的具体过程如下:
20、对输电线路舞动数学模型求偏导,将电流微元分解到三维直角坐标系,得到x、y和z轴分量:
21、
22、
23、式中,分别表示电流微元在三维直角坐标系x、y和z轴分量;
24、将x、y和z轴分量代入毕奥沙伐尔电磁方程得到输电线路舞动状态下的磁场模型为:
25、
26、
27、
28、式中,bx、by、bz分别表示x、y、z轴磁场,μ0为真空磁导率,i为线路电流,(x0,y0,z0)为所求磁场点坐标,r为所求磁场点与输电线路之间的距离。
29、作为本发明的一种优选方案,所述步骤3的具体过程如下:
30、设定a相和b相线路正下方对应的磁性传感器分别编号为1和2,最后一个磁性传感器编号为3,则每个磁性传感器测得的y轴磁场为:
31、by1=bya1+byb1+byc1
32、by2=bya2+byb2+byc2
33、by3=bya3+byb3+byc3
34、式中,by1、by2和by3分别为1、2和3号磁性传感器处测得的y轴方向合成磁场,bya1、byb1和byc1分别为a、b和c相线路在1号磁性传感器处y轴方向的磁场,bya2、byb2和byc2分别为a、b和c相线路在2号磁性传感器处y轴方向的磁场,bya3、byb3和byc3分别为a、b和c相线路在3号磁性传感器处y轴方向的磁场;根据输电线路舞动状态下的磁场模型,将by转化为如下形式:
35、by=m′cosθ+n′sinθ
36、m′、n′分别为余弦角和正弦角系数:
37、
38、将每个磁性传感器测得的y轴磁场转化为如下矩阵形式:
39、
40、式中,ma1、mb1和mc1分别表示a、b和c相线路在1号磁性传感器处的余弦角系数,ma2、mb2和mc2分别表示a、b和c相线路在2号磁性传感器处的余弦角系数,ma3、mb3和mc3分别表示a、b和c相线路在1号磁性传感器处的余弦角系数,na1、nb1和nc1分别表示a、b和c相线路在1号磁性传感器处的正弦角系数,na2、nb2和nc2分别表示a、b和c相线路在2号磁性传感器处的正弦角系数,na3、nb3和nc3分别表示a、b和c相线路在3号磁性传感器处的正弦角系数,θa、θb和θc分别为a、b和c相线路的舞动角度;
41、上式进一步转化为:
42、b=m cosθ+nsinθ
43、式中,
44、通过采集输电线路空间磁场,求解得到三相线路的舞动角度。
45、一种计算机设备,包括存储器、处理器,以及存储在所述存储器中并能够在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述的基于磁场的输电线路舞动状态建模及检测方法的步骤。
46、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现所述的基于磁场的输电线路舞动状态建模及检测方法的步骤。
47、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
48、1、本发明提出的输电线路舞动检测方法,该方法针对输电线路受到风力作用发生舞动的情况,建立了此时输电线路的舞动数学模型及磁场模型,实现了输电线路舞动角度的非接触检测,即传感器无需安装在线路上,可以减少带电作业的风险。
49、2、本发明采用的磁性传感器仅需安装在输电塔架上,安装和维护成本低,同时具有较强的抗干扰能力,可以在高温、雨雪等恶劣天气下同样具有较好的舞动检测效果。
50、3、本发明提出的输电线路舞动磁场模型可以分析线路周围的空间磁场分布情况,为线路舞动状态下的磁场检测提供理论依据。
本文地址:https://www.jishuxx.com/zhuanli/20240905/286441.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。