一种多维力传感器的现场快速标定的加载装置及方法与流程
- 国知局
- 2024-09-05 14:39:22
本发明涉及传感器标定,尤其涉及一种多维力传感器的现场快速标定的加载装置及方法。
背景技术:
1、在工业机器人领域,多维力传感器是一种直接测量工业机器人在动态条件下受力情况的有效工具,能够实时输出工业机器人与目标对象之间相互作用的多维力或力矩,可用于精密装配、物料搬运、焊接、打磨等工艺操作。通常,多维力传感器在使用前需要进行加载标定实验,以确定传感器的输入输出关系,因此加载标定装置在传感器标定过程中十分重要。
2、例如中国专利申请号cn201510232268.2公开了一种六维力传感器标定方法,在该方法中采用了一种六维力传感器标定装置,该装置包括工作台、短支架、回转工作台、传感器下夹盘、待标定的六维力传感器、传感器加载盘、横梁和支撑柱;所述工作台靠近四侧和中部均沿纵向和横向设置相互垂直的滑槽;所述短支架为四个并分别安装在工作台的四侧中部;所述回转工作台安装在工作台的中部;在工作台的一对角方向上分别垂直安装支撑柱,横梁水平安装在支撑柱的顶部;所述传感器下夹盘安装在回转工作台上,六维力传感器安装在传感器下夹盘上,所述传感器加载盘安装在六维力传感器上;在传感器加载盘的四侧分别设置水平拉杆,在传感器加载盘的顶部设置垂直拉杆;所述短支架包括底座、竖直支撑板和短夹具,所述底座固定在工作台上并与滑槽可滑动配合,所述竖直支撑板竖直固定在底座上,所述短夹具水平设置在竖直支撑板上并与竖直支撑板在竖直方向上可滑动配合;短夹具的一侧靠近外端设置定滑轮ⅰ和定滑轮ⅱ,所述定滑轮ⅱ位于定滑轮ⅰ的斜上方,在短夹具的另一侧靠近外端设置一定滑轮ⅲ;所述横梁上且位于垂直拉杆的正上方设置一定滑轮ⅳ,所述横梁上且靠近横梁的外端设置一定滑轮ⅴ。
3、目前,现有的标定装置通过滑轮导向砝码加载,调整载荷传递绳索与水平面之间的角度来改变载荷的方向。但其角度也有一定的测量误差,滑轮与绳索之间也有一定的摩擦力,这些都会影响标定精度。该方式的标定装置体积十分庞大(尤其被检多维力传感器为大量程时),操作灵活性差,只能在固定的地点进行标定,且人工搬运砝码费时费力。此外,用砝码加载的方式不能实现任意力的连续加载,无法达到实际生产需求。
技术实现思路
1、本发明要解决的技术问题,在于提供一种多维力传感器的现场快速标定的加载装置及方法,实现加载力及力矩的连续可调,加载精度高。
2、本发明是这样实现的:
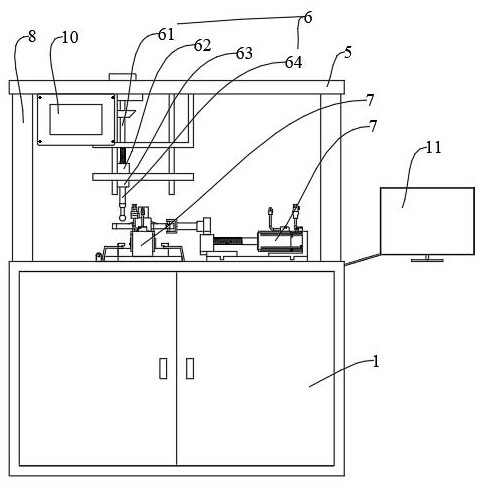
3、第一方面,本发明提供了一种多维力传感器的现场快速标定的加载装置及方法,包括有工作台、用于固定被检多维力传感器的加载底盘、加载连接件、顶板、垂直加载机构以及水平加载机构,所述加载底盘与工作台转动连接,所述顶板通过支柱设置在工作台的上方,所述加载连接件固定在被检多维力传感器顶部;
4、所述垂直加载机构与顶板滑动连接,所述垂直加载机构包括有第一丝杆加载组件以及连接在第一丝杆加载组件下端的第一滑块,所述第一滑块连接有第一标准力传感器,所述第一标准力传感器连接有第一加载件;
5、所述水平加载机构滑动连接在工作台的上表面,所述水平加载机构包括有第二丝杆加载组件以及连接在第二丝杆加载组件端部的第二滑块,所述第二滑块连接有第二标准力传感器,所述第二标准力传感器连接有第二加载件;
6、所述加载连接件包括有与被检多维力传感器相连接的连接部,所述连接部连接有加载部,所述加载部由两组水平加载单元和一组竖直加载单元组成,其中一所述水平加载单元向被检多维力传感器的x轴方向延伸,另一所述水平加载单元向被检多维力传感器的y轴方向延伸;
7、每组所述水平加载单元均包括有第一加载端和第二加载端,同一所述水平加载单元内的第一加载端和第二加载端分别位于连接部的两侧,每一所述第一加载端均开设有第一凹槽和缺口,所述第一加载件位于第一凹槽内时,所述第一丝杆加载组件驱动第一加载件沿竖直方向移动,以实现对被检多维力传感器绕x轴方向加载力矩或绕y轴方向加载力矩的加载;
8、所述第二加载件位于缺口时,所述第二丝杆加载组件驱动第二加载件沿水平方向移动,以实现对被检多维力传感器绕z轴方向加载力矩的加载;
9、每一所述第二加载端均开设有第二凹槽,所述第二加载件位于第二凹槽内时,所述第二丝杆加载组件驱动第二加载件沿水平方向移动,以实现对被检多维力传感器x轴方向加载力或y轴方向加载力的加载;
10、所述竖直加载单元向被检多维力传感器的z轴方向延伸,所述竖直加载单元开设有第三凹槽,所述第三凹槽的中心线与被检多维力传感器的z轴重合,所述竖直加载单元侧壁设置有与第三凹槽相连通的避让槽,所述避让槽与第三凹槽相连通,所述第一加载件位于第三凹槽内时,所述第一丝杆加载组件驱动第一加载件沿竖直方向移动,以实现对被检多维力传感器z轴方向加载力 的加载。
11、进一步的,所述水平加载机构设置有两个,其中一所述水平加载机构沿被检多维力传感器x轴方向设置,另一所述水平加载机构沿被检多维力传感器y轴方向设置;加载时,采用所述垂直加载机构以及两个水平加载机构这三个中任意一个单独加载的方式加载连接件上;或采用垂直加载机构以及两个水平加载机构这三个的任意组合方式同时耦合加载在加载连接件上。
12、进一步的,所述第一加载件包括有竖杆、第一加载球、第二加载球和连接杆,所述竖杆与第一标准力传感器连接,所述第一加载球连接在竖杆的下端,所述连接杆的上端与第一加载球连接,所述连接杆的下端与第二加载球连接;
13、所述第二加载件包括有横杆、横截面为u型的u型块、第三加载球,所述横杆与第二标准力传感器连接,所述u型块与横杆连接,且所述u型块的开口远离横杆的一端,所述第三加载球设置在u型块的开口处,且所述第三加载球通过两根固定杆与u型块固定连接。
14、进一步的,所述第一丝杆加载组件包括有第一电机、垂直丝杆、移动支架、l型支架、导杆以及连接板,所述移动支架、l型支架和导杆均与顶板连接,且所述导杆的下端贯穿l型支架延伸到l型支架的下方,所述连接板位于l型支架的下方,且所述连接板与导杆滑动连接;
15、所述垂直丝杆的上端与移动支架转动连接,所述第一电机通过传动组件与垂直丝杆连接,所述第一滑块连接在垂直丝杆的外壁,且所述第一滑块与连接板连接。在第一加载件位于第一凹槽或第三凹槽内时,随着第一电机的持续运转,第一滑块仍然有沿竖直向上或向下移动的趋势,使得,第一加载件对加载连接件施加的加载力逐渐变大,且加载力变化具有连续性,实现了任意力的连续加载。并且,采用垂直丝杆驱动加载件的方式,相比于现有技术中采用砝码的方式,加载精度更高。
16、进一步的,所述传动组件包括有主动锥齿轮以及与主动锥齿轮啮合连接的从动锥齿轮,所述主动锥齿轮连接在第一电机的外壁,所述从动锥齿轮连接在垂直丝杆的外壁。
17、进一步的,所述顶板开设有第一滑槽,所述移动支架顶部连接有导向块,所述导向块的横截面为t型,所述导向块滑动连接在第一滑槽内,所述连接板开设有第二滑槽,所述第一滑块滑动连接在第二滑槽内;在第二滑槽的侧壁设置有导槽,导槽的长度与第二滑槽的长度相匹配,所述第一滑块的外壁设置有滑动片,所述滑动片与导槽滑动连接。
18、所述移动支架沿第一滑槽移动,以改变第一加载件对加载连接件的施力位置,从而对绕x轴或y轴的力矩标定。
19、进一步的,所述第二丝杆加载组件包括有第二电机、水平丝杆以及固定板,所述固定板设置在工作台表面,所述第二电机与水平丝杆连接,所述第二滑块连接在水平丝杆的外壁,且所述第二滑块与固定板滑动连接。在第二加载件位于缺口或者第二凹槽内时,随着第二电机的持续运转,第二滑块仍然有沿水平移动的趋势,使得,第二加载件对加载连接件施加的加载力逐渐变大,且加载力变化具有连续性,实现了任意力的连续加载。并且,采用水平丝杆驱动加载件的方式,相比于现有技术中采用砝码的方式,加载精度更高。
20、进一步的,所述第二丝杆加载组件还包括有滑移板,所述第二电机与滑移板固定连接,所述滑移板与固定板滑动连接,且所述滑移板沿固定板的滑动方向与第二滑块沿固定板的滑动方向相垂直;所述滑移板沿固定板滑动,以改变第二加载件对加载连接件的施力位置,从而对绕z轴的力矩标定。
21、进一步的,所述加载底盘外围设置有卡扣,所述工作台顶部设置有安装槽,所述安装槽分布在加载底盘外围,所述安装槽侧壁连接有锁扣,所述加载底盘通过卡扣和锁扣固定在工作台表面。
22、进一步的,还包括有显示仪表和计算机,所述显示仪表与计算机连接,所述计算机与被检多维力传感器、垂直加载机构以及两个水平加载机构连接。
23、第二方面,本发明提供了一种多维力传感器的现场快速标定的加载方法,基于第一方面中的多维力传感器的现场快速标定的加载装置,所述加载方法包括:
24、标定z轴方向的加载力时,移动所述移动支架,使第一加载件移入第三凹槽内;所述第一丝杆加载组件驱动第一加载件沿竖直方向移动,且在第一加载件竖直向下移动时,第一标准力传感器和被检多维力传感器分别采集z轴方向的加载力和,在第一加载件竖直向上移动时,第一标准力传感器和被检多维力传感器分别采集z轴方向的加载力和;将采集的z轴方向的加载力、、和传输给计算机处理,完成被检多维力传感器z轴方向加载力的标定;
25、标定绕z轴方向的加载力矩时,先移动所述滑移板至左限位,将其中一水平加载单元上的缺口转至与第二加载件相对齐的位置,第二丝杆加载组件驱动第二加载件沿水平方向移动,第二标准力传感器和被检多维力传感器分别采集加载力和加载力矩;
26、再移动所述滑移板至右限位,将另一水平加载单元上的缺口转至与第二加载件相对齐的位置,第二丝杆加载组件驱动第二加载件沿水平方向移动,第二标准力传感器和被检多维力传感器分别采集加载力和加载力矩;将采集加载力和加载力矩传输给计算机处理,完成被检多维力传感器z轴方向加载力矩的标定;
27、标定x轴方向的加载力时,将沿被检多维力传感器x轴方向的水平加载单元旋转至设置在被检多维力传感器x轴方向的水平加载机构的位置处,且使第二加载端靠近该水平加载机构,移动所述滑移板至中间位置,使第二加载件移入第二凹槽中,在第二加载件向远离加载连接件一侧移动时,第二标准力传感器和被检多维力传感器分别采集加载力和,在第二加载件向靠近加载连接件一侧移动时,第二标准力传感器和被检多维力传感器分别采集加载力和,将采集的加载力、、和传输给计算机处理,完成被检多维力传感器x轴方向加载力的标定;
28、在标定x轴方向的加载力的基础上,标定绕x轴方向的加载力矩时,移动所述移动支架至左限位,转动加载底盘且使第一加载件移动,使第一加载件移入第一凹槽中,在第一加载件上升时,第一标准力传感器和被检多维力传感器分别采集加载力和加载力矩,在第一加载件下降时,第一标准力传感器和被检多维力传感器分别采集加载力和加载力矩,将采集的、、加载力矩和传输给计算机处理,完成被检多维力传感器x轴方向加载力矩的标定;
29、标定y轴方向的加载力时,将沿被检多维力传感器y轴方向的水平加载单元旋至与设置在被检多维力传感器y轴方向的水平加载机构的位置处,且使第二加载端靠近该水平加载机构,移动所述滑移板至中间位置,使第二加载件移入第二凹槽中,在第二加载件向远离加载连接件一侧移动时,第二标准力传感器和被检多维力传感器分别采集加载力和,在第二加载件向靠近加载连接件一侧移动时,第二标准力传感器和被检多维力传感器分别采集加载力和,将采集的加载力、、和传输给计算机处理,完成被检多维力传感器y轴方向加载力的标定;
30、在标定y轴方向的加载力的基础上,标定绕y轴方向的加载力矩时,使加载底盘旋转90°,移动所述移动支架,使第一加载件与第一凹槽相对齐,移动第一加载件,使第一加载件移入第一凹槽中,在第一加载件上升时,第一标准力传感器和被检多维力传感器分别采集加载力和,在第一加载件下降时,第一标准力传感器和被检多维力传感器分别采集加载力和,将采集的、和加载力矩、传输给计算机处理,完成被检多维力传感器y轴方向加载力矩的标定;
31、加载时,采用所述垂直加载机构以及两个水平加载机构这三个中任意一个单独加载的方式加载连接件上;或采用垂直加载机构以及两个水平加载机构这三个的任意组合方式同时耦合加载在加载连接件上。
32、本发明的优点在于:在第一加载件和第二加载件与加载连接件的接触后,随着三个电机的持续运转,第一加载件和第二加载件对加载连接件施加的加载力也随着变化,且加载力变化具有连续性,实现了任意力的连续加载。并且,采用丝杆驱动加载件的方式,相比于现有技术中采用砝码的方式,加载精度更高。
33、并且,本装置的结构紧凑,装配调试方便,在工业机器人工作现场即可进行检定工作。在加载底盘上具有不同安装孔位,使得通用性好,能适用于多种规格工业机器人用多维力传感器的标定。
本文地址:https://www.jishuxx.com/zhuanli/20240905/287493.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表