一种定位埋地管道气体泄漏位置的钻地机器人
- 国知局
- 2024-09-05 14:39:45
本发明属于工业机器人,尤其涉及一种定位埋地管道气体泄漏位置的钻地机器人。
背景技术:
1、埋地管道是保障正常社会生产生活供给的一类重要管道,如天然气管道、液化石油气管道、燃气管道、氢气管道、二氧化碳管道等。相较于地面管道和架空管道,埋地管道由于埋藏于地下,受到土壤和地下构筑设施的阻隔,无法实现目视化管理和可到达巡检,一旦发生泄漏,仅能依靠地面探测器来大致辨别泄漏位置,再结合开挖验证来确定具体泄漏位置,但往往需要开挖多处来逐一排查,造成了抢修时间、人力物力资源的浪费。对于易燃易爆的天然气、液化石油气而言,泄漏后快速定位泄漏位置,是给予及时的应急处置、避免造成着火爆炸事故、减少事故损失的关键工作。目前,所有的埋地管道泄漏定位作业都是在地面进行的,但是从管道中泄漏的气体经过土壤的阻碍、遮挡和地上风吹的影响,难以在地面通过气体探测器来准确定位埋地管道的气体泄漏位置,泄漏位置定位的不准确会导致开挖验证成本高、应急抢修不及时、泄漏事故升级为着火爆炸事故等不利影响。亟需研发一种可以在地下自由前进和转向,搜索并定位管道泄漏位置的钻地机器人。
技术实现思路
1、本发明要解决的技术问题是,提供一种定位埋地管道气体泄漏位置的钻地机器人,能够在土壤中自由前进和转向,实现对气体泄漏位置的检测。
2、为实现上述目的,本发明采用如下的技术方案:
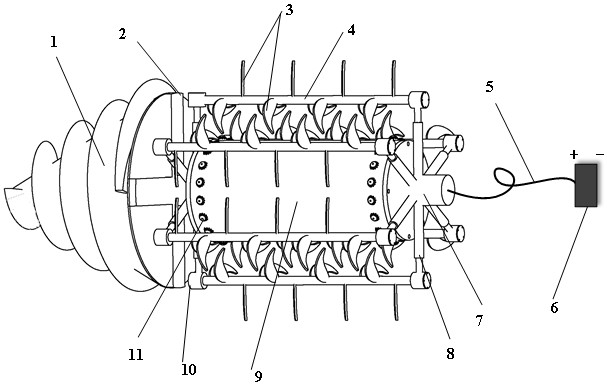
3、一种定位埋地管道气体泄漏位置的钻地机器人,包括:用于在土壤中钻进的钻进模块、用于采集气体浓度和前端图像的全方位采集模块、用于提供动力的动力模块、用于控制钻进模块和全方位采集模块以及分析气体浓度的智能控制模块;其中,动力模块通过导线与钻进模块和全方位采集模块连接,智能控制模块与动力模块、钻进模块以及全方位采集模块之间设置通信连接;在电机驱动下,通过钻进模块、全方位采集模块、动力模块以及智能控制模块实现机器人在土壤中的自动行进、转向和探测气体泄漏位置;
4、所述钻进模块包括:机器人主体、头部钻头和镶嵌在机器人主体上的多向可调旋转叶片;所述多向可调旋转叶片具有三组六个,环绕在机器人主体的周围;所述多向可调旋转叶片绕其轴向转动,其双侧都可伸缩,实现机器人的前进转向;所述多向可调旋转叶片的主体部分为圆柱体钢管,圆柱体钢管上缠绕有若干第一旋转螺旋叶片;
5、全方位采集模块包括:图像采集器和气体传感器;气体传感器用于采集周围气体浓度,并将采集到的气体浓度传回智能控制模块;所述图像采集器用于采集机器人前端图像;
6、所述智能控制模块包括:控制装置、信号接收发送器和gps定位装置,信号接收发送器用于接收和发送信号,gps定位装置用于获取机器人的实时位置,控制装置根据气体浓度和机器人位置,使得机器人向着气体浓度高的方向运动;其中,控制装置通过控制头部钻头和多向可调旋转叶片,利用自推进方式运动,使得机器人钻入地下并可在土壤中自由行进和转向,在运动的同时采集气体浓度和前端图像信息并将信息传至智能控制模块对气体浓度进行分析,智能控制多向可调旋转叶片的伸缩程度使得机器人朝着气体浓度高的方向钻进,找到管道气体泄漏位置。
7、作为优选,所述动力模块包括:电源、导线和电机;其中,所述电源包括:
8、外置电源和内置电源,内置电源位于机器人主体内部;所述电机包括:第一电机和第二电机,第一电机安装于机器人主体内部,第二电机安装在多向可调旋转叶片上。
9、本发明具有以下有益效果:
10、1、本发明具有检测精准、功耗低、体积小,而且运动灵活的特点,通过机器人的介入,可以减少人员暴露在危险环境中的风险,提高泄漏事故的应急响应速度,并降低事故造成的损失。因此,检测气体泄漏位置的机器人对于保障人员安全和环境保护具有重要意义。
11、2、本发明设计圆锥形头部钻头,在其顶端设置有若干牙轮,主体环绕有第一旋转螺旋叶片,使机器人高效的钻进。
12、3、本发明设计通过控制多向可调旋转叶片的伸缩装置不同伸缩程度实现任意方向转向的钻进模块。
13、4、本发明设计在土壤中可多方位全面感知的实时检测气体浓度的半渗透结构,在探测盖下方放置有适应在土壤中不同角度防堵塞的材质,能起到过滤的作用,只允许气体进入,土壤碎石等较大固体颗粒无法接触到气体传感器;气体浓度传感器布置在机器人主体的头部和尾部的不同方位,能够沿机器人行进方向及径向进行气体探测,可实现多方位全面感知气体浓度。
技术特征:1.一种定位埋地管道气体泄漏位置的钻地机器人,其特征在于,包括:用于在土壤中钻进的钻进模块、用于采集气体浓度和前端图像的全方位采集模块、用于提供动力的动力模块、用于控制钻进模块和全方位采集模块以及分析气体浓度的智能控制模块;其中,动力模块通过导线与钻进模块和全方位采集模块连接,智能控制模块与动力模块、钻进模块以及全方位采集模块之间设置通信连接;在电机驱动下,通过钻进模块、全方位采集模块、动力模块以及智能控制模块实现机器人在土壤中的自动行进、转向和探测气体泄漏位置;
2.如权利要求1所述的定位埋地管道气体泄漏位置的钻地机器人,其特征在于,所述动力模块包括:电源、导线和电机;其中,所述电源包括:外置电源和内置电源,内置电源位于机器人主体内部;所述电机包括:第一电机和第二电机,第一电机安装于机器人主体内部,第二电机安装在多向可调旋转叶片上。
技术总结本发明公开一种定位埋地管道气体泄漏位置的钻地机器人,属于工业机器人技术领域,包括:用于在土壤中钻进的钻进模块、用于采集气体浓度和前端图像的全方位采集模块、用于提供动力的动力模块、用于控制钻进模块和全方位采集模块以及分析气体浓度的智能控制模块。采用本发明的技术方案,能够实现不开挖埋地管道而进行精准定位埋地管道泄漏位置,可在土壤中自由转向与前进,钻进效率高,能在过滤土壤的同时实现气体检测。技术研发人员:陈双庆,王杉龙,董宏丽,官兵,丰生杰,蒋小渝,周顺,于泽,李文铖受保护的技术使用者:东北石油大学三亚海洋油气研究院技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/287538.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表