输出轴转速估计与换挡控制方法、装置、设备及存储介质与流程
- 国知局
- 2024-09-05 14:50:32
本发明涉及amt换挡控制,尤其涉及一种输出轴转速估计与换挡控制方法、装置、设备及存储介质。
背景技术:
1、近年来中重型电控机械式自动变速器(automated mechanical transmission,amt)主箱无同步器换挡逐渐成为行业趋势;针对制动停车工况,由于主箱低挡区目标挡位接合齿轮等效转动惯量偏大(相较于高挡区),因此换起步挡时对主箱调速要求比较高;另外,考虑到气刹制动延迟、制动过程中输出轴转速下降速率非线性、质量坡度变化等因素,挂挡时的输出轴转速估计对换挡品质的影响不可忽视。
2、制动停车换挡一般方法如下:离合器保持分离状态,当车速降低到降挡点后,离合器二次离合对一轴提速,待结合齿转速差满足挂挡速差条件后执行挂挡动作;现有技术方案一般有两种:其一,考虑质量坡道的影响,通过查表补偿挂挡转速差阈值,即调大阈值以提高不同工况的适应性;其二,在制动到目标转速前,先挂空挡,等待车辆车速低于静态换挡阈值后,tcu识别为静态换挡从而挂回起步挡。
3、对上述第一种技术方案,其缺点是缺少输出轴转速预测或估计误差偏大,导致实际顶齿转速差过大,易发打齿或换挡噪声大,或者由于设计挂挡阈值偏小导致主箱二次离合和制动调速循环,从而引起挂挡时间过长;第二种技术方案的缺点是换起步挡响应偏慢,且高度依赖静态换挡品质,对急停急走工况的适应性偏差。
技术实现思路
1、本发明的主要目的在于提供一种输出轴转速估计与换挡控制方法、装置、设备及存储介质,旨在解决现有技术中制动停车换挡缺少输出轴转速预测或估计误差偏大,导致实际顶齿转速差过大,易发打齿或换挡噪声大,或者由于设计挂挡阈值偏小导致主箱二次离合和制动调速循环,从而引起挂挡时间过长,换起步挡响应偏慢,且高度依赖静态换挡品质,对急停急走工况的适应性偏差的技术问题。
2、第一方面,本发明提供一种输出轴转速估计与换挡控制方法,所述输出轴转速估计与换挡控制方法包括以下步骤:
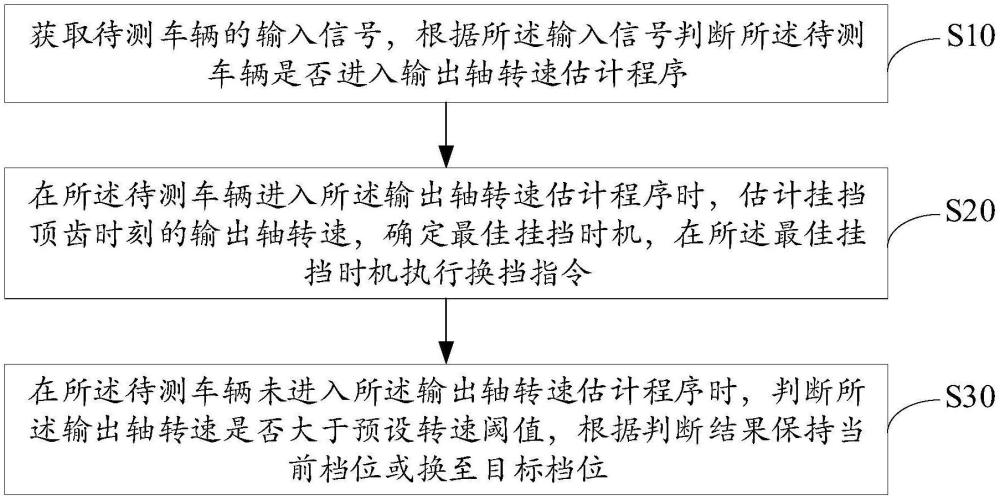
3、获取待测车辆的输入信号,根据所述输入信号判断所述待测车辆是否进入输出轴转速估计程序;
4、在所述待测车辆进入所述输出轴转速估计程序时,估计挂挡顶齿时刻的输出轴转速,确定最佳挂挡时机,在所述最佳挂挡时机执行换挡指令;
5、在所述待测车辆未进入所述输出轴转速估计程序时,判断所述输出轴转速是否大于预设转速阈值,根据判断结果保持当前档位或换至目标档位。
6、可选地,所述获取待测车辆的输入信号,根据所述输入信号判断所述待测车辆是否进入输出轴转速估计程序,包括:
7、获取待测车辆的当前周期油门开度、脚制动开关、整车质量、道路坡度、当前挡位、目标挡位、发动机怠速、输出轴转速和挡位速比,将所述当前周期油门开度、所述脚制动开关、所述整车质量、所述道路坡度、所述当前挡位、所述目标挡位、所述发动机怠速、所述输出轴转速和所述挡位速比作为输入信号;
8、根据所述输入信号中的所述当前周期油门开度和所述输出轴转速判断所述待测车辆是否进入输出轴转速估计程序。
9、可选地,所述根据所述输入信号中的所述当前周期油门开度和所述输出轴转速判断所述待测车辆是否进入输出轴转速估计程序,包括:
10、判断所述当前周期油门开度是否低于预设松油门阈值;
11、在所述当前周期油门开度低于所述预设松油门阈值,所述输出轴转速小于预设停车转速上限阈值,所述输出轴转速大于预设停车转速下限阈值,且在预设时间内输出轴转速在相邻两个周期内处于转速下降状态时,判定所述待测车辆进入输出轴转速估计程序;
12、在所述当前周期油门开度不低于所述预设松油门阈值,和/或所述输出轴转速不小于预设停车转速上限阈值,和/或所述输出轴转速不大于预设停车转速下限阈值,和/或在预设时间内输出轴转速在相邻两个周期内不处于转速下降状态时,判定所述待测车辆未进入输出轴转速估计程序。
13、可选地,所述在所述待测车辆进入所述输出轴转速估计程序时,估计挂挡顶齿时刻的输出轴转速,确定最佳挂挡时机,在所述最佳挂挡时机执行换挡指令,包括:
14、在所述待测车辆进入所述输出轴转速估计程序时,使用灰度预测模型估计挂挡顶齿时刻的输出轴转速估计值;
15、根据所述输出轴转速估计值和狗齿速差确定最佳挂挡时机,在所述最佳挂挡时机执行换挡指令。
16、可选地,所述在所述待测车辆进入所述输出轴转速估计程序时,使用灰度预测模型估计挂挡顶齿时刻的输出轴转速估计值,包括:
17、在所述待测车辆进入所述输出轴转速估计程序时,获取转速估计原始数据对应的原始数据序列;
18、使用灰度预测模型对所述原始数据序列进行累加,获得紧邻均值序列;
19、根据所述原始数据序列和所述紧邻均值序列通过下式获得参数估计值:
20、
21、
22、y=[x(0)(2) x(0)(3) x(0)(4) … x(0)(20)]t
23、其中,为参数估计值,a为发展系数,b为灰色作用量,j表示序列x(0),x(2)中第j个数据,t表示矩阵转置,b为与所述紧邻均值序列相关的系数矩阵,y为原始数据序列,为发展系数的估计值,为灰色作用量的估计值;
24、x(0)=[x(0)(1),x(0)(2),x(0)(3),…,x(0)(20)]
25、x(0)为所述原始数据序列,x(1)为对所述原始数据序列进行累加后的累加数据序列;
26、x(1)=[x(1)(1),x(1)(2),x(1)(3),…,x(1)(20)]
27、x(2)=[x(2)(2),x(2)(3),x(2)(4),…,x(2)(20)]
28、x(2)为所述累加数据序列的紧邻均值序列;
29、根据所述参数估计值通过下式确定第k+1周期的输出轴转速估计值:
30、
31、
32、其中,为第k+1周期的输出轴转速估计值,为第k+1个一次累加数据的估计值,为第k个一次累加数据的估计值,k=1,2,3,取
33、通过下述公式获得后验差比值:
34、
35、
36、
37、
38、
39、
40、其中,c为后验差比值,s1为残差的标准差,s2为后验标准差,n为原始序列数据向量x(0)的维度,e(k)为残差,为残差均值,x(0)(k)为原始序列数据向量x(0)中的第k个数据,为第k周期的输出轴转速估计值,为后验均值;
41、将所述后验差比值与预设差比值阈值进行比较;
42、在所述后验差比值小于预设差比值阈值时,确定所述灰度预测模型的精度合格,通过下式获得输出轴转速估计值;
43、
44、其中,为第个输出轴转速估计值,为第个一次累加数据的估计值,为第个一次累加数据的估计值,ct为采样历史数据起点到当前周期所经历的时间,tm为tcu从发出换挡指令到结合齿顶齿所经历的时间;
45、在所述后验差比值不小于所述预设差比值阈值时,确定所述灰度预测模型的精度不合格。
46、可选地,所述根据所述输出轴转速估计值和狗齿速差确定最佳挂挡时机,在所述最佳挂挡时机执行换挡指令,包括:
47、在所述灰度预测模型的精度合格时,获取狗齿速差,通过下式确定最佳挂挡时机:
48、
49、其中,为第个输出轴转速估计值,ct为采样历史数据起点到当前周期所经历的时间,tm为tcu从发出换挡指令到结合齿顶齿所经历的时间,ic为目标挡位速比,nthres为挂挡狗齿速差阈值上限,ne为发动机怠速;
50、在当前时刻的输出轴转速估计值满足上述公式时,确定所述当前时刻为最佳挂挡时机,在所述最佳挂挡时机执行换挡指令;
51、在所述灰度预测模型的精度不合格时,通过下式确定挂挡时机:
52、
53、其中,x为输出轴转速,ne为发动机怠速,ic为目标挡位速比,nthres为挂挡狗齿速差阈值上限,nloss为换挡过程中的输出轴转速损失;
54、在所述当前时刻的所述输出轴转速满足上述公式时,确定所述当前时刻为最佳挂挡时机,在所述最佳挂挡时机执行换挡指令。
55、可选地,所述在所述待测车辆未进入所述输出轴转速估计程序时,判断所述输出轴转速是否大于预设转速阈值,根据判断结果保持当前档位或换至目标档位,包括:
56、在所述待测车辆未进入所述输出轴转速估计程序时,判断所述输出轴转速是否不小于预设停车转速上限阈值,并判断所述输出轴转速是否不大于预设停车转速下限阈值;
57、在所述输出轴转速不小于预设停车转速上限阈值时,保持当前档位不换挡;
58、在所述输出轴转速不大于预设停车转速下限阈值时,换挡至目标档位。
59、第二方面,为实现上述目的,本发明还提出一种输出轴转速估计与换挡控制装置,所述输出轴转速估计与换挡控制装置包括:
60、程序判断模块,用于获取待测车辆的输入信号,根据所述输入信号判断所述待测车辆是否进入输出轴转速估计程序;
61、挂挡时机确定模块,用于在所述待测车辆进入所述输出轴转速估计程序时,估计挂挡顶齿时刻的输出轴转速,确定最佳挂挡时机,在所述最佳挂挡时机执行换挡指令;
62、挂挡判断模块,用于档位在所述待测车辆未进入所述输出轴转速估计程序时,判断所述输出轴转速是否大于预设转速阈值,根据判断结果保持当前档位或换至目标档位。
63、第三方面,为实现上述目的,本发明还提出一种输出轴转速估计与换挡控制设备,所述输出轴转速估计与换挡控制设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的输出轴转速估计与换挡控制程序,所述输出轴转速估计与换挡控制程序配置为实现如上文所述的输出轴转速估计与换挡控制方法的步骤。
64、第四方面,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有输出轴转速估计与换挡控制程序,所述输出轴转速估计与换挡控制程序被处理器执行时实现如上文所述的输出轴转速估计与换挡控制方法的步骤。
65、本发明提出的输出轴转速估计与换挡控制方法,通过获取待测车辆的输入信号,根据所述输入信号判断所述待测车辆是否进入输出轴转速估计程序;在所述待测车辆进入所述输出轴转速估计程序时,估计挂挡顶齿时刻的输出轴转速,确定最佳挂挡时机,在所述最佳挂挡时机执行换挡指令;在所述待测车辆未进入所述输出轴转速估计程序时,判断所述输出轴转速是否大于预设转速阈值,根据判断结果保持当前档位或换至目标档位,能够提高重载坡道制动停车策略的一致性和稳定性;提高了amt在非铺装路面制动停车换挡的适应性;减小了制动停车换挡噪声冲击,缩短了换挡时间,降低了打齿故障率,提升了换挡响应的速度,提高了输出轴转速估计与换挡控制的精度。
本文地址:https://www.jishuxx.com/zhuanli/20240905/288390.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表