一种非平稳齿轮不对中误差动态响应抑制方法及系统
- 国知局
- 2024-09-05 14:49:17
本发明涉及齿轮传动,具体涉及一种非平稳齿轮不对中误差动态响应抑制方法及系统。
背景技术:
1、齿轮系统具有结构紧凑、传动比稳定、振动噪声小、使用寿命长等优点。它适用于高速重载和低速轻载的高传动性能要求,广泛应用于航空航天、石化风电、矿山冶金、起重运输等多个领域,实现运动和动力的传递。然而,齿轮故障和制造安装误差等因素限制了齿轮的高精度、高可靠性、低振动和低噪声的发展。因此,在齿轮箱中进行误差监测并采用合适的方法进行改善,可以避免不必要的经济损失和人员伤亡。
2、目前,关于齿轮不对中误差控制的方法主要有主动控制和被动控制。被动控制通过改进制造工艺、提高装配精度、轮齿修形以及采用斜齿轮和人字齿轮等方式来改善不对中误差的影响。主动控制则是通过传感器采集齿轮传动系统实时的振动数据,并根据预先设定的控制算法计算并输出控制信号,驱动安装在齿轮传动系统中的作动器来抑制振动。
3、齿轮不对中误差已成为一个研究热点。如何通过有效的手段模拟和调节不对中误差具有重要意义。目前的齿轮不对中误差控制机构主要依靠算法,无法从根源上解决问题,而且对特定的激励调控能力和范围也非常有限。
技术实现思路
1、为了克服上述现有技术中存在的缺陷,本发明的目的是提供一种非平稳齿轮不对中误差动态响应抑制方法及系统。
2、为了实现本发明的上述目的,本发明提供了一种非平稳齿轮不对中误差动态响应抑制方法,包括以下步骤:
3、同步获取齿轮齿根应变信号以及齿轮振动加速度信号;
4、根据齿轮振动加速度信号获取单齿啮合周期;
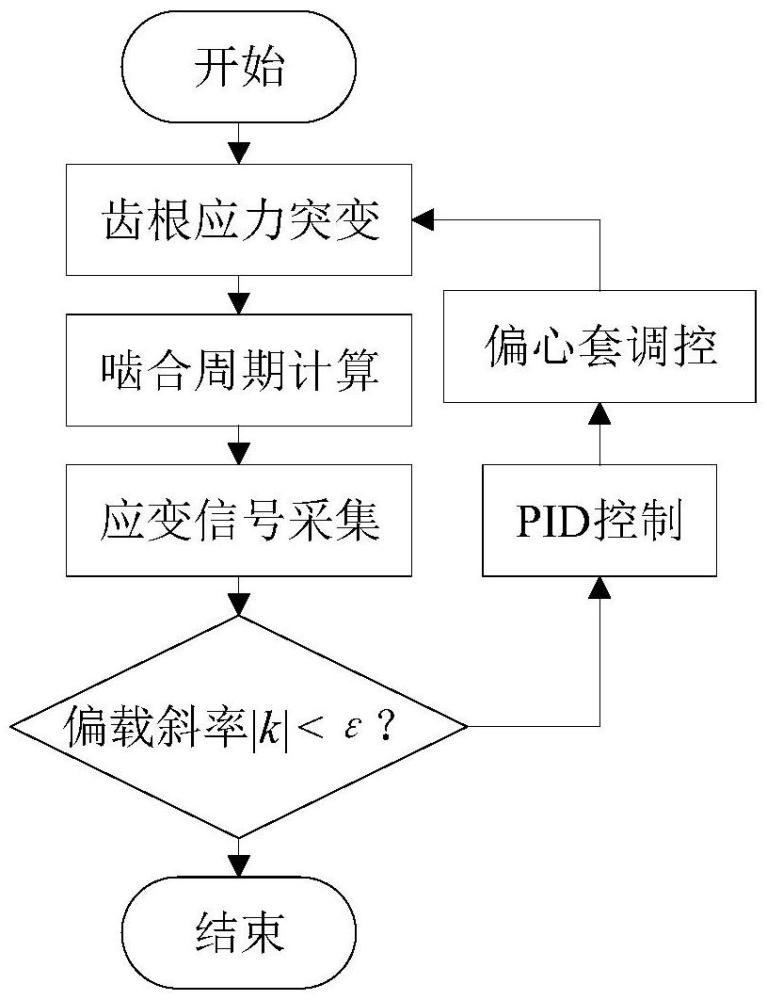
5、寻找应变信号中的应变突变点确定齿轮啮合状态,并提取啮合状态下的齿根应力;
6、截取啮合状态下单齿啮合周期内的应变信号,分别计算其rms值,判断齿轮偏载状况;
7、确定偏心套转角与齿轮角不对中误差的关系;
8、基于偏心套转角与齿轮角不对中角度的关系,通过调整偏心套转角实现对齿轮轴绕x轴和绕y轴的转动角度的调控。
9、本方法集信号采集、传输、计算为一体快速、准确地实现了对齿轮不对中误差的动态抑制。
10、在该非平稳齿轮不对中误差动态响应抑制方法的一种可选方案中,在靠近齿轮端面齿根处沿轴向处布置应变片实时采集齿根应变信号,并发送至外部采集设备。
11、该可选方案可准确测得齿轮啮合的应变信号。
12、在该非平稳齿轮不对中误差动态响应抑制方法的一种可选方案中,获取单齿啮合时间的步骤为:
13、根据齿轮振动加速度信号获取齿轮转动的瞬时频率fr;
14、由齿轮转频计算单齿啮合时间,单齿啮合时间其中z为齿轮齿数。
15、在该非平稳齿轮不对中误差动态响应抑制方法的一种可选方案中,确定齿轮啮合状态的步骤为:
16、提取单齿啮合时间内的部分连续齿根应变信号;
17、实时计算采集到的齿根应变信号的rms值,并将其作为当前齿根处应变大小,当齿根应变大小超过应变阈值时,认定当前时刻为应变突变点并记录当前时刻,确认齿轮由此时进入啮合。
18、在该非平稳齿轮不对中误差动态响应抑制方法的一种可选方案中,当齿根应变信号向量v中存在至少两组应变信号时,计算各组应变信号的rms值,当任一组应变信号超过应变阈值时,认定当前时刻为应变突变点。
19、在该非平稳齿轮不对中误差动态响应抑制方法的一种可选方案中,以双端单偏心套结构中的一端偏心套外圆圆心o为原点,建立oxyz直角坐标系,双端单偏心套结构中的另一端偏心套外圆圆心为点o’,
20、偏心套转角与不对中误差的关系为:
21、
22、其中x1、y1和x2、y1的表达式为:
23、
24、式中θ1和θ2分别为双端单偏心套结构两端偏心套内圆圆心与x轴正向的夹角,其中xo'和yo'的表达式为:
25、
26、其中,θx为齿轮轴绕x轴转动角度,θy为绕y轴转动角度,l为齿轮箱两轴承孔跨距,(xo’,yo’,l)为左端偏心套外圆心坐标,(x1,y1,0)和(x2,y2,l)分别为两端偏心套内圆心坐标,e为双端单偏心套结构的偏心量。
27、在该非平稳齿轮不对中误差动态响应抑制方法的一种可选方案中,调控齿轮轴绕x轴和绕y轴的转动角度的步骤为:
28、预设斜率容差,以偏载斜率接近于0为目标,通过pid控制不断更新偏心套转角直至偏载斜率的绝对值小于预设斜率容差。
29、在该非平稳齿轮不对中误差动态响应抑制方法的一种可选方案中,pid传递函数为:
30、
31、式中,kp为比例系数,ti为积分时间常数,τ为微分时间常数。
32、本发明还提出了一种非平稳齿轮不对中误差动态响应抑制系统,包括控制模块、存储模块、与控制模块控制连接且输出轴与偏心套连接的伺服电机、用于采集齿轮齿根应变信号的应变片以及用于采集齿轮振动加速度信号的加速度传感器;
33、所述应变片和加速度传感器分别与控制模块连接,向其发送各自采集的齿根应变信号、振动加速度信号,所述控制模块与存储模块相互通信连接,所述存储模块用于存放至少一个可执行指令,该可执行指令使所述控制模块根据所述齿根应变信号、振动加速度信号执行如上述非平稳齿轮不对中误差动态响应抑制方法对应的操作,驱动伺服电机旋转,调整偏心套转角,对齿轮不对中误差进行动态抑制。
34、在该非平稳齿轮不对中误差动态响应抑制系统的一种可选方案中,所述应变片设置于靠近齿轮端面齿根处沿轴向处,所述加速度传感器设置于齿轮端面。
35、本发明的有益效果是:本发明通过布置在齿轮齿根处的应变片获取齿根靠近两端面的应变信号,通过寻找应变突变点的方式判断齿轮啮合状态,以振动信号角域变换方法计算齿轮啮合周期,并以此采集一个啮合周期内的应变信号并判断偏载情况,于不对中误差与偏心套转动角度的关系,调整偏心套偏转角度,结合齿轮偏载情况和pid控制更新偏心套转角,实现对齿轮不对中误差的动态抑制。通过本发明可减少齿轮传动过程中的振动和噪声,提高机械系统的工作平稳性和舒适性;还可以减少摩擦损失,提高传动效率,从而提高系统的能量转换效率;均衡齿面载荷分布,减少局部应力集中,延长齿轮的使用寿命,降低维护成本;并且,通过改善齿轮副啮合对中,还提高了工作精度,保证了工件的加工质量和定位精度。
36、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:1.一种非平稳齿轮不对中误差动态响应抑制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的非平稳齿轮不对中误差动态响应抑制方法,其特征在于,在靠近齿轮端面齿根处沿轴向处布置应变片实时采集齿根应变信号,并发送至外部采集设备。
3.根据权利要求1所述的非平稳齿轮不对中误差动态响应抑制方法,其特征在于,获取单齿啮合时间的步骤为:
4.根据权利要求1所述的非平稳齿轮不对中误差动态响应抑制方法,其特征在于,确定齿轮啮合状态的步骤为:
5.根据权利要求4所述的非平稳齿轮不对中误差动态响应抑制方法,其特征在于,当齿根应变信号向量v中存在至少两组应变信号时,计算各组应变信号的rms值,当任一组应变信号超过应变阈值时,认定当前时刻为应变突变点。
6.根据权利要求1所述的非平稳齿轮不对中误差动态响应抑制方法,其特征在于,以双端单偏心套结构中的一端偏心套外圆圆心o为原点,建立oxyz直角坐标系,双端单偏心套结构中的另一端偏心套外圆圆心为点o’,
7.根据权利要求1所述的非平稳齿轮不对中误差动态响应抑制方法,其特征在于,调控齿轮轴绕x轴和绕y轴的转动角度的步骤为:
8.根据权利要求7所述的非平稳齿轮不对中误差动态响应抑制方法,其特征在于,pid传递函数为:
9.一种非平稳齿轮不对中误差动态响应抑制系统,其特征在于,包括控制模块、存储模块、与控制模块控制连接且输出轴与偏心套连接的伺服电机、用于采集齿轮齿根应变信号的应变片以及用于采集齿轮振动加速度信号的加速度传感器;
10.根据权利要求9所述的非平稳齿轮不对中误差动态响应抑制系统,其特征在于,所述应变片设置于靠近齿轮端面齿根处沿轴向处,所述加速度传感器设置于齿轮端面。
技术总结本发明提出了一种非平稳齿轮不对中误差动态响应抑制方法及系统。该方法为:同步获取齿轮齿根应变信号以及齿轮振动加速度信号;根据齿轮振动加速度信号获取单齿啮合周期;寻找应变信号中的应变突变点确定齿轮啮合状态,并提取啮合状态下的齿根应力;截取啮合状态下单齿啮合周期内的应变信号,分别计算其RMS值,判断齿轮偏载状况;确定偏心套转角与齿轮角不对中误差的关系;基于偏心套转角与齿轮角不对中角度的关系,通过调整偏心套转角实现对齿轮轴绕x轴和绕y轴的转动角度的调控。本方法集信号采集、传输、计算为一体快速、准确地实现了对齿轮不对中误差的动态抑制。技术研发人员:王利明,张浩,杨江,邹德升,黄文彬,丁晓喜,余文念受保护的技术使用者:重庆大学技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/288268.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表