相机位姿的确定方法及装置与流程
- 国知局
- 2024-09-05 14:55:23
本申请涉及图像处理,尤其涉及一种相机位姿的确定方法及装置。
背景技术:
1、在计算机视觉、同时定位与地图构建(simultaneous localization andmapping,s lam)和三维重建等相关领域中,需要确定相机在三维空间中的位置和朝向。相机的内外参数决定了其自身特性,内参一般在相机出厂时便确定或者通过标定可以得到,为了得到完整位姿还需对外参进行计算。
2、煤矿井下巷道场景中灯光昏暗,存在大量的诸如巷道壁等低纹理区域。这些区域具有梯度变化缓慢,对比度低,纹理信息不明显的特点。因此,在煤矿井下巷道等低纹理场景下采集的图像存在特征不明显的问题,进而难以提供精确有效的位姿信息。
技术实现思路
1、本申请旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本申请的第一个目的在于提出一种相机位姿的确定方法,以通过单一灭点的可靠性解算出部分位姿参数作为先验,指导基于特征计算的位姿优化筛选过程,并将点特征和线特征有机融合使用,以增大在巷道弱纹理场景下的特征丰富度与位姿解算可靠性,从而提高了在井下巷道等弱纹理、高鲁棒性要求的场景中,相机位姿计算的准确性。
3、本申请的第二个目的在于提出一种相机位姿的确定装置。
4、本申请的第三个目的在于提出一种电子设备。
5、本申请的第四个目的在于提出一种计算机可读存储介质。
6、本申请的第五个目的在于提出一种计算机程序产品。
7、为达上述目的,本申请第一方面实施例提出了一种相机位姿的确定方法,包括:
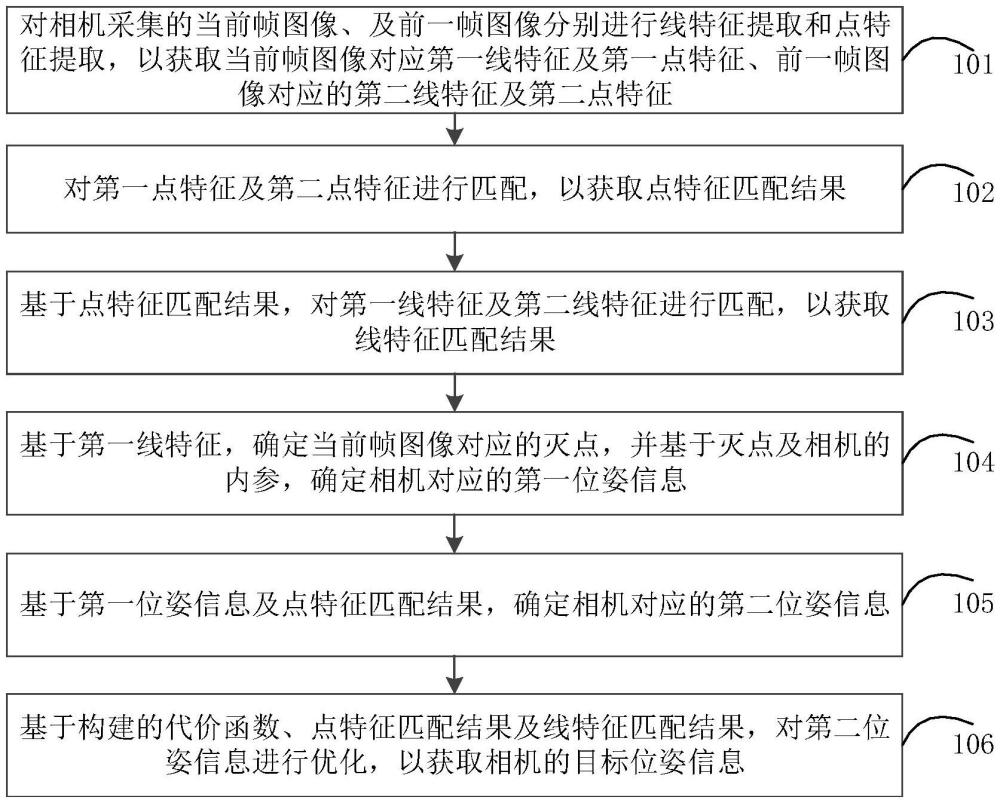
8、对相机采集的当前帧图像、及前一帧图像分别进行线特征提取和点特征提取,以获取所述当前帧图像对应第一线特征及第一点特征、所述前一帧图像对应的第二线特征及第二点特征;
9、对所述第一点特征及所述第二点特征进行匹配,以获取点特征匹配结果;
10、基于所述点特征匹配结果,对所述第一线特征及所述第二线特征进行匹配,以获取线特征匹配结果;
11、基于所述第一线特征,确定所述当前帧图像对应的灭点,并基于所述灭点及所述相机的内参,确定所述相机对应的第一位姿信息;
12、基于所述第一位姿信息及所述点特征匹配结果,确定所述相机对应的第二位姿信息;
13、基于构建的代价函数、所述点特征匹配结果及所述线特征匹配结果,对所述第二位姿信息进行优化,以获取所述相机的目标位姿信息。
14、为达上述目的,本申请第二方面实施例提出了一种相机位姿的确定装置,包括:
15、提取模块,用于对相机采集的当前帧图像、及前一帧图像分别进行线特征提取和点特征提取,以获取所述当前帧图像对应第一线特征及第一点特征、所述前一帧图像对应的第二线特征及第二点特征;
16、第一匹配模块,用于对所述第一点特征及所述第二点特征进行匹配,以获取点特征匹配结果;
17、第二匹配模块,基于所述点特征匹配结果,对所述第一线特征及所述第二线特征进行匹配,以获取线特征匹配结果;
18、第一确定模块,用于基于所述第一线特征,确定所述当前帧图像对应的灭点,并基于所述灭点及所述相机的内参,确定所述相机对应的第一位姿信息;
19、第二确定模块,用于基于所述第一位姿信息及所述点特征匹配结果,确定所述相机对应的第二位姿信息;
20、获取模块,用于基于构建的代价函数、所述点特征匹配结果及所述线特征匹配结果,对所述第二位姿信息进行优化,以获取所述相机的目标位姿信息。
21、为达上述目的,本申请第三方面实施例提出了一种电子设备,包括:
22、处理器,以及与所述处理器通信连接的存储器;
23、所述存储器存储计算机执行指令;
24、所述处理器执行所述存储器存储的计算机执行指令,以实现如第一方面实施例所述的方法。
25、为达上述目的,本申请第四方面实施例提出了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如第一方面实施例所述的方法。
26、为达上述目的,本申请第五方面实施例提出了一种计算机程序产品,计算机程序,该计算机程序被处理器执行时实现第一方面实施例所述的方法。
27、本申请提供的相机位姿的确定方法及装置,通过单一灭点的可靠性解算出部分位姿参数作为先验,指导基于特征计算的位姿优化筛选过程,并将点特征和线特征有机融合使用,以增大在巷道弱纹理场景下的特征丰富度与位姿解算可靠性,从而提高在井下巷道等弱纹理、高鲁棒性要求的场景中,相机位姿计算的准确性。
28、本申请附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:1.一种相机位姿的确定方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述基于所述点特征匹配结果,对所述第一线特征及所述第二线特征进行匹配,以获取线特征匹配结果,包括:
3.根据权利要求1所述的方法,其特征在于,所述基于所述第一线特征,确定所述当前帧图像对应的灭点,包括:
4.根据权利要求1或3所述的方法,其特征在于,所述基于所述灭点及所述相机的内参,确定所述相机对应的第一位姿信息的公式为:
5.根据权利要求3所述的方法,其特征在于,基于所述第一位姿信息及所述点特征匹配结果,确定所述相机对应的第二位姿信息,包括:
6.根据权利要求5所述的方法,其特征在于,还包括:
7.根据权利要求1所述的方法,其特征在于,所述基于构建的代价函数、所述点特征匹配结果及所述线特征匹配结果,对所述第二位姿信息进行优化,以获取所述相机的目标位姿信息,包括:
8.根据权利要求7所述的方法,其特征在于,所述代价函数为:
9.根据权利要求1所述的方法,其特征在于,所述线特征提取包括以下步骤:
10.一种相机位姿的确定装置,其特征在于,包括:
技术总结本申请提出一种相机位姿的确定方法及装置,其中,方法包括:确定相机采集的当前帧图像、及前一帧图像之间的点特征匹配结果、及线特征匹配结果,并基于当前帧图像对应的第一线特征,确定当前帧图像对应的灭点,并基于灭点及相机的内参,确定相机对应的第一位姿信息,基于第一位姿信息及点特征匹配结果,确定相机对应的第二位姿信息,基于构建的代价函数、点特征匹配结果及线特征匹配结果,对第二位姿信息进行优化,以获取相机的目标位姿信息。由此,提高了在井下巷道等弱纹理、高鲁棒性要求的场景中,相机位姿计算的准确性。技术研发人员:李和平,洪劭楸,程健,安宁,李昊,修海鑫,王广福,闫鹏鹏受保护的技术使用者:煤炭科学研究总院有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/288864.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表