车辆盲区目标检测跟踪方法、装置、电子设备及存储介质与流程
- 国知局
- 2024-09-05 15:05:40
本发明涉及目标跟踪,尤其涉及一种车辆盲区目标检测跟踪方法、装置、电子设备及存储介质。
背景技术:
1、由于车辆后视镜的视野不够,车辆两侧始终会存在目视观察的盲区,导致驾驶人员在车辆变道、并线等行车环节中面临安全隐患。为提高驾驶人员的安全性,目前通常设置车辆盲区监测系统,辅助驾驶人员监测盲区范围内的目标。
2、车辆盲区监测系统为了能够覆盖更大的盲区范围,多采用具有较大的视场角的鱼眼相机。然而鱼眼相机的图像畸变严重,传统的目标检测方法在应用于鱼眼相机的图像中时,难以保证对目标位置和速度的测量精度,导致目前盲区监测系统的应用效果较差。
技术实现思路
1、本发明实施例提供了一种车辆盲区目标检测跟踪方法、装置、电子设备及存储介质,以解决提高车辆盲区中目标检测和跟踪的精度的问题。
2、第一方面,本发明实施例提供了一种车辆盲区目标检测跟踪方法,包括:
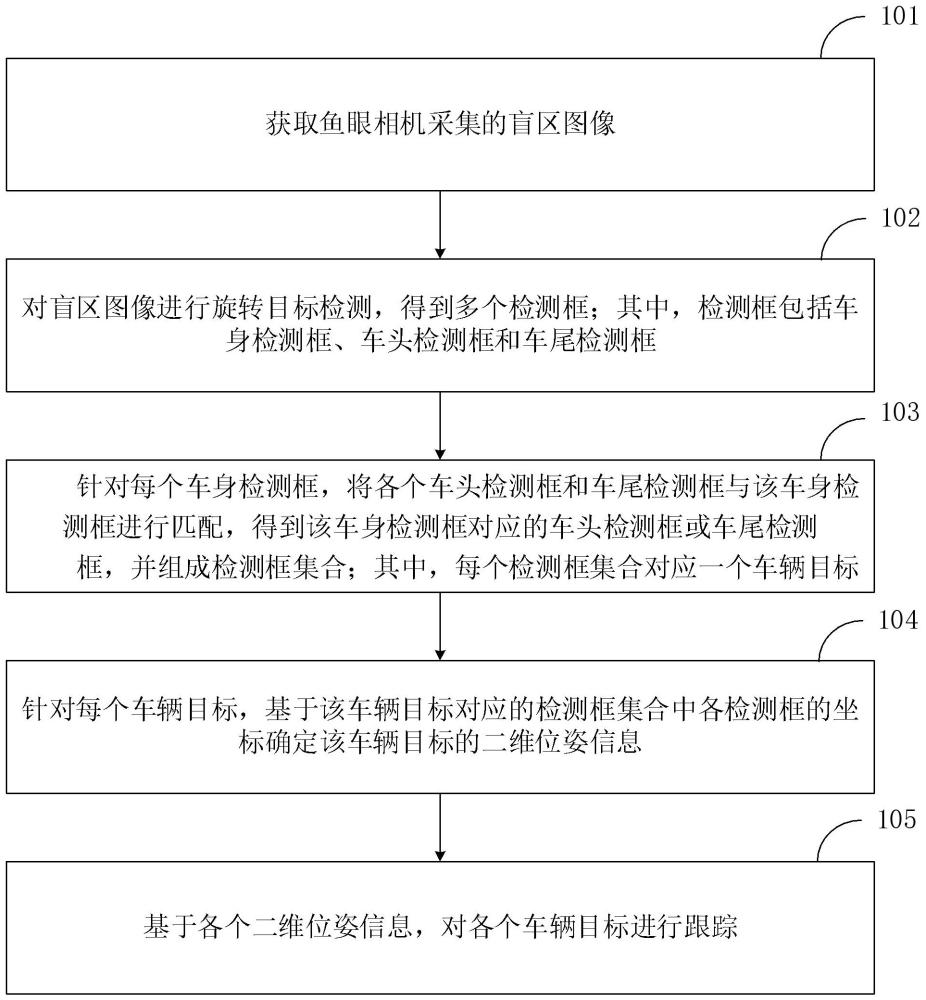
3、获取鱼眼相机采集的盲区图像;
4、对盲区图像进行旋转目标检测,得到多个检测框;其中,检测框包括车身检测框、车头检测框和车尾检测框;
5、针对每个车身检测框,将各个车头检测框和车尾检测框与该车身检测框进行匹配,得到该车身检测框对应的车头检测框或车尾检测框,并组成检测框集合;其中,每个检测框集合对应一个车辆目标;
6、针对每个车辆目标,基于该车辆目标对应的检测框集合中各检测框的坐标确定该车辆目标的二维位姿信息;
7、基于各个二维位姿信息,对各个车辆目标进行跟踪。
8、在一种可能的实现方式中,针对每个车身检测框,将各个车头检测框和车尾检测框与该车身检测框进行匹配,得到该车身检测框对应的车头检测框或车尾检测框,并组成检测框集合,包括:
9、针对每个车身检测框,计算各个车头检测框和车尾检测框与该车身检测框的交并比,得到多个交并比,若各个交并比中的最大值大于预设阈值,则将最大的交并比对应的车头检测框或车尾检测框作为该车身检测框对应的车头检测框或车尾检测框,并组成检测框集合。
10、在一种可能的实现方式中,二维位姿信息包括中心位置、航向角、长度和宽度;
11、针对每个车辆目标,基于该车辆目标对应的检测框集合中各检测框的坐标确定该车辆目标的二维位姿信息,包括:
12、将第一车辆目标对应的检测框集合中车身检测框的底边与车头检测框或车尾检测框底边的交点作为第一测距点,将车身检测框的底边的端点作为第二测距点,将车头检测框或车尾检测框底边的端点作为第三测距点;其中,第一车辆目标为任一车辆目标;
13、基于鱼眼相机的内参和外参将第一测距点、第二测距点和第三测距点的像素坐标转换为世界坐标;
14、基于第一测距点和第二测距点的世界坐标计算第一车辆目标的航向角和长度,根据第一测距点和第三测距点的世界坐标计算第一车辆目标的宽度,根据第一测距点、第二测距点、第三测距点的世界坐标计算第一车辆目标的中心坐标。
15、在一种可能的实现方式中,盲区图像为多张;基于各个二维位姿信息,对各个车辆目标进行跟踪,包括:
16、采用卡尔曼滤波算法,基于各张盲区图像中各个车辆目标的二维位姿信息对各个车辆目标进行跟踪。
17、在一种可能的实现方式中,对盲区图像进行旋转目标检测,得到多个检测框,包括:
18、将盲区图像输入经过训练的旋转目标检测模型,得到多个检测框。
19、在一种可能的实现方式中,检测框还包括行人检测框,每个行人检测框对应一个行人目标;
20、在对盲区图像进行旋转目标检测,得到多个检测框之后,还包括:
21、针对每个行人目标,基于该行人目标对应的行人检测框的坐标确定该行人目标的二维位姿信息。
22、在一种可能的实现方式中,每个行人目标的航向角为预设航向角,长度为预设长度,宽度为预设宽度;针对每个行人目标,基于该行人目标对应的行人检测框的坐标确定该行人目标的二维位姿信息,包括:
23、将第一行人目标对应的行人检测框的地面中点作为测距点;其中,第一行人目标为任一行人目标;
24、基于鱼眼相机的内参和外参,将测距点的像素坐标转换为世界坐标,并作为第一行人目标的中心位置。
25、第二方面,本发明实施例提供了一种车辆盲区目标检测跟踪装置,包括:
26、获取模块,用于获取鱼眼相机采集的盲区图像;
27、检测模块,用于对盲区图像进行旋转目标检测,得到多个检测框;其中,检测框包括车身检测框、车头检测框和车尾检测框;
28、匹配模块,用于针对每个车身检测框,将各个车头检测框和车尾检测框与该车身检测框进行匹配,得到该车身检测框对应的车头检测框或车尾检测框,并组成检测框集合;其中,每个检测框集合对应一个车辆目标;
29、位姿识别模块,用于针对每个车辆目标,基于该车辆目标对应的检测框集合中各检测框的坐标确定该车辆目标的二维位姿信息;
30、跟踪模块,用于基于各个二维位姿信息,对各个车辆目标进行跟踪。
31、第三方面,本发明实施例提供了一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
32、第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
33、本发明实施例提供一种车辆盲区目标检测跟踪方法、装置、电子设备及存储介质,通过旋转目标检测和检测框匹配,可直接确定车辆盲区图像中各车辆目标的二维位姿信息,无需对鱼眼相机拍摄的盲区图像进行畸变矫正,也无需求解车辆目标的三维参数,就可对车辆盲区中的车辆目标进行跟踪,计算量低、处理速度快且检测精度高。
技术特征:1.一种车辆盲区目标检测跟踪方法,其特征在于,包括:
2.根据权利要求1所述的车辆盲区目标检测跟踪方法,其特征在于,所述针对每个车身检测框,将各个车头检测框和车尾检测框与该车身检测框进行匹配,得到该车身检测框对应的车头检测框或车尾检测框,并组成检测框集合,包括:
3.根据权利要求1所述的车辆盲区目标检测跟踪方法,其特征在于,所述二维位姿信息包括中心位置、航向角、长度和宽度;
4.根据权利要求1所述的车辆盲区目标检测跟踪方法,其特征在于,所述盲区图像为多张;所述基于各个二维位姿信息,对各个车辆目标进行跟踪,包括:
5.根据权利要求1所述的车辆盲区目标检测跟踪方法,其特征在于,所述对所述盲区图像进行旋转目标检测,得到多个检测框,包括:
6.根据权利要求1所述的车辆盲区目标检测跟踪方法,其特征在于,所述检测框还包括行人检测框,每个行人检测框对应一个行人目标;
7.根据权利要求6所述的车辆盲区目标检测跟踪方法,其特征在于,每个行人目标的航向角为预设航向角,长度为预设长度,宽度为预设宽度;所述针对每个行人目标,基于该行人目标对应的行人检测框的坐标确定该行人目标的二维位姿信息,包括:
8.一种车辆盲区目标检测跟踪装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如上的权利要求1至7中任一项所述方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上的权利要求1至7中任一项所述方法的步骤。
技术总结本发明提供一种车辆盲区目标检测跟踪方法、装置、电子设备及存储介质。该方法包括:获取鱼眼相机采集的盲区图像;对盲区图像进行旋转目标检测,得到多个检测框;其中,检测框包括车身检测框、车头检测框和车尾检测框;针对每个车身检测框,将各个车头检测框和车尾检测框与该车身检测框进行匹配,得到该车身检测框对应的车头检测框或车尾检测框,并组成检测框集合;其中,每个检测框集合对应一个车辆目标;针对每个车辆目标,基于该车辆目标对应的检测框集合中各检测框的坐标确定该车辆目标的二维位姿信息;基于各个二维位姿信息,对各个车辆目标进行跟踪。本发明能够对车辆盲区中的车辆目标进行跟踪,计算量低、处理速度快且检测精度高。技术研发人员:徐显杰,李东武,于彬,包永亮,窦汝振受保护的技术使用者:天津所托瑞安汽车科技有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/289527.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表