一种雷达回波的自适应聚类方法
- 国知局
- 2024-09-05 15:05:12
本申请涉及雷达信号处理,具体涉及一种雷达回波的自适应聚类方法。
背景技术:
1、随着雷达系统参数的逐渐优化,雷达可接收的目标回波信息越来越丰富,这对于正确检测海上是有利的,但也出现了一些新问题。例如,当雷达距离分辨率提高时,雷达波束照射到海上目标(尤其是大目标,且船头或船尾朝向雷达),在回波中会出现多个强散射点,这些强散射点处于回波的不同距离单元上,而位于强散射点之间的目标回波幅度并不强烈,即属于同一目标的回波出现了能量断开区域。针对现有技术存在以下问题:
2、当利用现有的恒虚警检测技术(如频域cfar方法)处理这类雷达回波时,属于同一个目标的回波在检测结果中可能会出现多个点迹,这将为后续的数据处理带来额外的计算量,且会影响目标跟踪性能,因此,需要对恒虚警处理后的目标点迹做凝聚处理,也就是将属于同一个目标的多个检测点进行聚类,使其合并为同一个有效目标,常规点迹凝聚方法示意图如图5所示,在方位-距离维或距离-多普勒维,以某一单元为中心形成检测窗口,将窗口内的若干单元能量都与待检测单元能量进行比较,若待检测单元为最大值则保留,否则舍弃,若目标能量连续,未出现能量断开区域,则以能量为主要信息来源的常规点迹凝聚方法可以有效解决问题,但是对于舰船类目标,在大多数情况下船头或船尾能量相对船中间区域高很多,此时采用常规点迹凝聚方法处理时,由于目标两端强散射点之间间隔了数个甚至数十个能量较低的弱散射点距离单元,在处理后,易将同一目标的不同强散射点判断为两个不同的目标,进而给雷达后续处理(如目标跟踪)造成错误引导。从散射机理的角度看,海上目标与环境相互耦合作用强,目标特性呈现很强的起伏性、时变性,能量作为众多特征中的一种,其随姿态、观测角度变化的起伏很剧烈,且船体不同几何结构、材料等对后向散射能量的影响很大,所以仅利用能量信息难以解决上述问题。
技术实现思路
1、本申请提供一种雷达回波的自适应聚类方法,以解决上述背景技术中提出的问题。
2、为解决上述技术问题,本申请所采用的技术方案是:
3、一种雷达回波的自适应聚类方法,包括以下步骤:
4、步骤一:频域cfar初步检测;
5、步骤二:点迹筛选;
6、步骤三:点迹聚类;
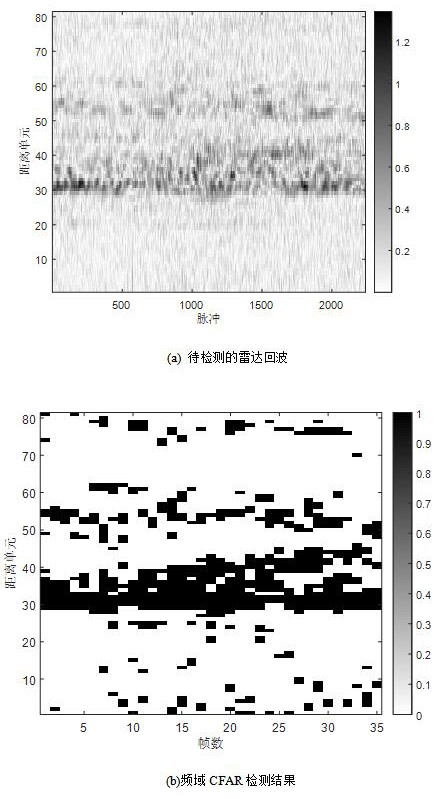
7、所述步骤一利用已有的频域cfar检测技术分析待检测的雷达回波,得到包含一系列点迹的二值检测结果;
8、所述步骤二在检测结果中,分析小面积点迹的实际意义并不突出,因此该步骤将筛除剔除一些占据面积较小的点迹;
9、所述步骤三中假设点迹筛选后共剩余个点迹,将它们按照面积大小进行排序,所构成的集合为记为,其中,点迹1面积最大,点迹面积最小,接下来,由面积最大的点迹开始,首先与面积次之的点迹判断是否属于同一类,完成之后与面积再次之的点迹进行判断,如此循环往复实现点迹之间的两两判决,当中还需借助辅助特征信息进行判决。
10、本申请技术方案的进一步改进在于:所述步骤一中得到的待检测的雷达回波图中,纵轴代表距离单元维度,横轴代表脉冲数,得到的频域cfar检测结果图中,纵轴代表距离单元维度,横轴代表帧时间维度,黑色部分表示检测输出的点迹,其中,帧时间维度中的一帧包含n个脉冲,n代表相干脉冲数。
11、本申请技术方案的进一步改进在于:所述步骤二中筛除方法包括以下步骤:
12、a1:统计所有点迹的面积,且此处的面积用点迹占据的距离-帧时间单元数量代替,构成集合;
13、a2:设置一个百分比p,0<p<100%,计算中对应的百分位数,找到面积大于该数值的点迹;
14、a3:剔除其余的点迹。
15、本申请技术方案的进一步改进在于:所述步骤三中利用特征相似性判断点迹k、m是否属于同一类目标的方法如下:
16、b1:计算点迹k内所有帧的特征值,得到点迹k特征值的分布区间,记为;计算点迹m内所有帧的特征值,得到点迹m特征值的分布区间,记为;
17、b2:根据、的重叠情况判断点迹k、m是否属于同一类,准则如下:若、无重叠,认为点迹k、m不属于同一类;若、有重叠,重叠的区间记为,计算重叠系数:,式中,代表区间的长度,代表取数组中的最小值,若大于相似性门限,认为点迹k、m属于同一类,否则不为同一类。
18、本申请技术方案的进一步改进在于:所述特征包括三种不同变换域:
19、c1:时域的相对平均幅度,长度为n的信号的raa特征的计算方法如下式:;
20、c2:得到的方法如下:首先需要计算的归一化平滑伪维格纳-威利分布,如式【1】
21、【1】;
22、式中,分别代表时间延迟和多普勒单元,为周围的参考单元信号,代表参考单元个数,分别代表和的平滑伪维格纳-威利分布,、分别表示的均值、方差序列,则可由式【2】计算得到:
23、【2】;
24、式中,代表时频平面内的时频脊序列;
25、c3:为得到,需要首先的双谱,双谱定义为其3阶累积量的2维离散傅里叶变换,即
26、;
27、式中,代表双谱函数,均代表频率,代表共轭转置符号,代表求期望,对角积分双谱可通过下式计算:
28、;
29、式中,坐标系由原双谱坐标系逆时针旋转45º得到,
30、;
31、实际使用时,以上三种特征可以任意选择其一,也可以两个或三个组合使用。
32、由于采用了上述技术方案,本申请相对现有技术来说,取得的技术进步是:
33、1、本申请提供一种雷达回波的自适应聚类方法,通过挖掘目标特性信息辅助判定雷达点迹的类别,使得点迹凝聚结果更加稳定可靠,并将两个点迹的特征值分布区间的重叠程度作为衡量点迹相似性的指标,在目标检测的基础上,合理利用目标特征的相似性,对不同强散射点是否属于同一目标进行判断,从而有效解决存在能量断开区域情况下目标聚类问题。
34、2、本申请提供一种雷达回波的自适应聚类方法,其中特征的选择具有开放性、灵活性,并且可以预先存储于软件之中,操作时可以灵活调用,以降低雷达处理的错误率。
技术特征:1.一种雷达回波的自适应聚类方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种雷达回波的自适应聚类方法,其特征在于:所述步骤一中得到的待检测的雷达回波图中,纵轴代表距离单元维度,横轴代表脉冲数,得到的频域cfar检测结果图中,纵轴代表距离单元维度,横轴代表帧时间维度,黑色部分表示检测输出的点迹,其中,帧时间维度中的一帧包含n个脉冲,n代表相干脉冲数。
3.根据权利要求1所述的一种雷达回波的自适应聚类方法,其特征在于:所述步骤二中筛除方法包括以下步骤:
4.根据权利要求1所述的一种雷达回波的自适应聚类方法,其特征在于:所述步骤三中利用特征相似性判断点迹k、m是否属于同一类目标的方法如下:
5.根据权利要求4所述的一种雷达回波的自适应聚类方法,其特征在于:所述特征包括三种不同变换域:
技术总结本发明公开了一种雷达回波的自适应聚类方法,涉及雷达信号处理领域,包括以下步骤:步骤一:频域CFAR初步检测;步骤二:点迹筛选;步骤三:点迹聚类;所述步骤一利用已有的频域CFAR检测技术分析待检测的雷达回波,得到包含一系列点迹的二值检测结果;所述步骤二在检测结果中,剔除一些占据面积较小的点迹。本发明通过目标特性挖掘信息辅助判定雷达点迹的类别,使得点迹凝聚结果更加稳定可靠,并将两个点迹的特征值分布区间的重叠程度作为衡量点迹相似性的指标,在目标检测的基础上,合理利用目标特征的相似性,对不同强散射点是否属于同一目标进行判断,从而有效解决存在能量断开区域情况下目标聚类问题。技术研发人员:丁昊,伍僖杰,关键,孙艳丽,刘宁波,于恒力,王国庆,曹政受保护的技术使用者:中国人民解放军海军航空大学技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/289479.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。