一种建筑墙面施工机器人的制作方法
- 国知局
- 2024-09-05 15:05:10
本发明涉及墙面粉刷,尤其涉及一种建筑墙面施工机器人。
背景技术:
1、在对建筑墙面进行施工时,需要对建筑墙面进行抹灰,墙面抹灰是将水泥浆涂抹到墙面上,在对墙面进行抹灰之后又需要将墙面上的水泥浆进行刮平处理,现在刮平处理一般由机器完成。
2、专利公开号为cn220828006u的专利,公开了一种墙面刮平装置,包括底板,所述底板的顶面安装有支撑板,所述支撑板内转动设有螺纹杆,所述螺纹杆的外表面螺纹套设有螺纹块,所述螺纹块的一侧固定设有连接块,所述连接块的一侧滑动设有电动滑轨,所述电动滑轨内滑动设有滑块,所述滑块的一侧固定设有安装板,所述安装板的一侧固定设有刮板,所述安装板远离刮板的一侧安装有第二电机,所述第二电机的输出端固定设有转轴,所述转轴转动插设在安装板内,所述转轴的外表面固定套设有打磨盘,所述安装板的两侧固定设有固定块。
3、在使用上述墙面刮平装置进行刮平处理时,通过开启电动滑轨从而使滑块能够带动安装板进行滑动,从而使刮板能够对墙面上的水泥浆进行刮平,然后刷辊贴合墙面,对刮平过后的水泥浆进行刷平,将多余的水泥浆刮除,刮除的水泥浆容易掉落到地面上,浪费材料的同时,还需要及时进行清理,因此现在研发一种能够自动将掉落的水泥浆进行回收的建筑墙面施工机器人。
技术实现思路
1、本发明提供一种能够自动将掉落的水泥浆进行回收的建筑墙面施工机器人,为了克服使用现有的墙面抹灰装置抹灰时,水泥浆容易掉落到地面的缺点。
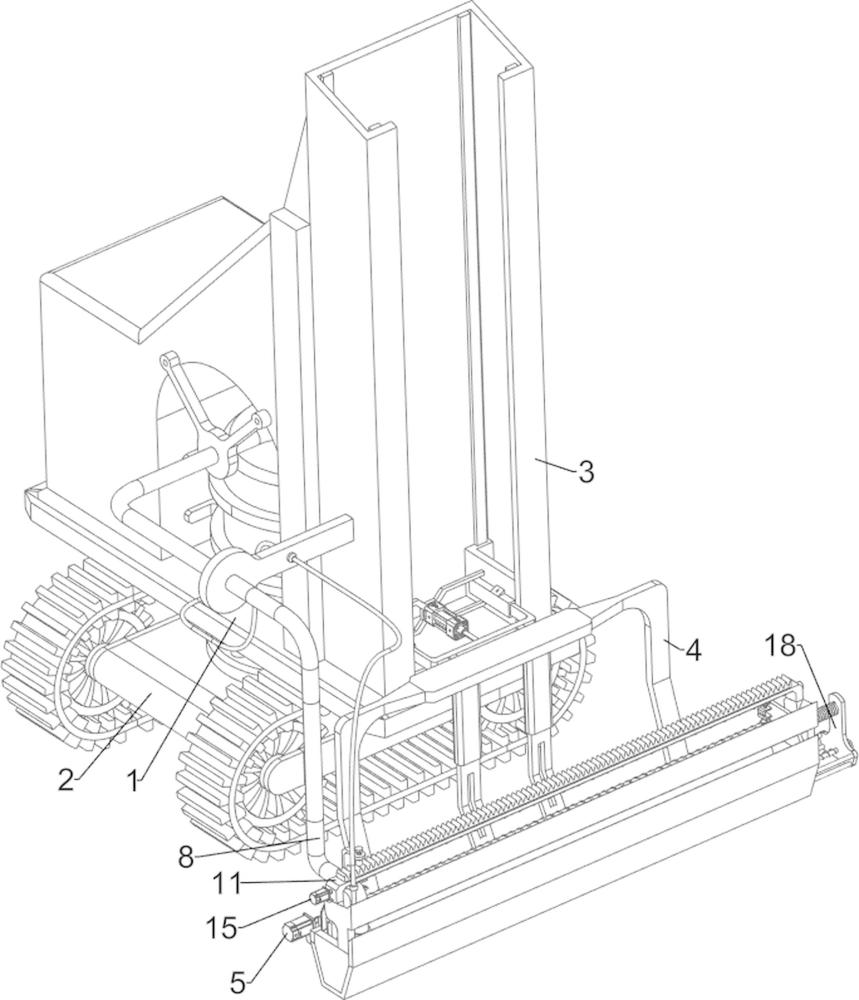
2、本发明的技术实施方案为:一种建筑墙面施工机器人,包括有移动台和移动机构,移动台底部设有移动机构,移动机构和外界控制系统通过控制模块电性连接,移动台上设有升降机构,升降机构和外界控制系统通过控制模块电性连接,升降机构上滑动式连接有刮平架,还包括有第一电机,第一电机设置在刮平架上,第一电机和外界控制系统通过控制模块电性连接,第一电机的输出连接有第一螺杆,第一螺杆和刮平架转动式连接,刮平架靠近第一螺杆一侧滑动式连接有连接块,连接块和第一螺杆螺纹式连接,移动台设置有用于收集水泥浆的收集箱,收集箱上设有吸浆组件,吸浆组件由吸料管和吸浆泵组成,吸浆泵和外界控制系统通过控制模块电性连接,吸浆泵设置在收集箱内,吸浆泵连接有吸料管,吸料管的吸料头和连接块固接。
3、可选地,还包括有抹平板,抹平板设置在刮平架靠近连接块一侧上,抹平板长于刮平架,连接块上设有用于将抹平板进行震动的敲击组件,敲击组件上设有驱动组件,收集箱靠近吸浆组件一侧设有喷浆组件,喷浆组件由喷浆泵和喷浆管组成,喷浆泵设置在收集箱内,喷浆泵和外界控制系统通过控制模块电性连接,喷浆泵连接有喷浆管,喷浆管的喷浆头和驱动组件连接,驱动组件用于驱动喷浆头移动。
4、可选地,敲击组件包括有凹凸板,凹凸板设置在抹平板顶部,连接块顶部设有固定板,固定板上滑动式连接有震动杆,震动杆和凹凸板挤压配合,震动杆和固定板之间连接有第一弹性件。
5、可选地,驱动组件包括有第二电机,第二电机设置在凹凸板靠近连接块一侧上,第二电机的输出轴连接有第二螺杆,第二螺杆和凹凸板转动式连接,第二螺杆上螺纹式连接有滑块,滑块和凹凸板滑动式连接,滑块和喷浆管的喷浆头固接。
6、可选地,刮平架远离升降机构的一侧为方形凹陷结构。
7、可选地,收集箱设有出料管,将出料管和外接收集设备连通。
8、可选地,还包括有用于将多余的料推动集中的推料机构,推料机构包括有导向板,导向板设置在刮平架靠近连接块一侧上,刮平架远离连接块一侧设置有固定架,导向板滑动式连接有刮料板,刮料板与刮平架滑动式连接,刮料板和固定架之间连接有第二弹性件,刮料板滑动式连接有对称设置的卡紧块,卡紧块相互远离的一侧和刮料板之间连接有第三弹性件,连接块设有用于将卡紧块向靠近连接块的位置进行拉动的拉动组件。
9、可选地,拉动组件包括有楔形板,楔形板连接在连接块顶部,楔形板和卡紧块卡接配合,刮平架靠近连接块一侧设置有挤压架,挤压架右部两侧均为斜面结构,挤压架和卡紧块挤压配合。
10、可选地,还包括有缓冲架,缓冲架滑动式连接在固定架上,缓冲架左部和刮料板挤压配合,缓冲架和固定架之间连接有第四弹性件。
11、可选地,还包括有软块,软块设置在缓冲架上。
12、与现有技术相比,本发明具有如下优点:本发明通过升降机构带动刮平架上升将墙面上的水泥浆刮取下来的时候,通过第一电机带动第一螺杆转动,进而使得吸料头左右移动将刮除下来的水泥浆吸入收集箱内,如此能够实现自动回收水泥浆的目的。
13、本发明通过设置抹平板能够初次将墙面上的水泥浆刮平,随后通过第二电机带动第二螺杆转动,从而使得吸浆组件不断左右移动进行二次喷水泥浆对墙面进行巩固。
14、本发明通过楔形板向右移动和卡紧块相互挤压配合,使得楔形板带动卡紧块和刮料板向左移动,刮料板将刮平架前部的残料向左推动集中,方便吸浆组件将残料回收。
技术特征:1.一种建筑墙面施工机器人,包括有移动台(1)和移动机构(2),移动台(1)底部设有移动机构(2),移动机构(2)和外界控制系统通过控制模块电性连接,移动台(1)上设有升降机构(3),升降机构(3)和外界控制系统通过控制模块电性连接,升降机构(3)上滑动式连接有刮平架(4),其特征是,还包括有第一电机(5),第一电机(5)设置在刮平架(4)上,第一电机(5)和外界控制系统通过控制模块电性连接,第一电机(5)的输出连接有第一螺杆(6),第一螺杆(6)和刮平架(4)转动式连接,刮平架(4)靠近第一螺杆(6)一侧滑动式连接有连接块(7),连接块(7)和第一螺杆(6)螺纹式连接,移动台(1)设置有用于收集水泥浆的收集箱(9),收集箱(9)上设有吸浆组件(8),吸浆组件(8)由吸料管和吸浆泵组成,吸浆泵和外界控制系统通过控制模块电性连接,吸浆泵设置在收集箱(9)内,吸浆泵连接有吸料管,吸料管的吸料头和连接块(7)固接。
2.如权利要求1所述的一种建筑墙面施工机器人,其特征是,还包括有抹平板(10),抹平板(10)设置在刮平架(4)靠近连接块(7)一侧上,抹平板(10)长于刮平架(4),连接块(7)上设有用于将抹平板(10)进行震动的敲击组件,敲击组件上设有驱动组件,收集箱(9)靠近吸浆组件(8)一侧设有喷浆组件(17),喷浆组件(17)由喷浆泵和喷浆管组成,喷浆泵设置在收集箱(9)内,喷浆泵和外界控制系统通过控制模块电性连接,喷浆泵连接有喷浆管,喷浆管的喷浆头和驱动组件连接,驱动组件用于驱动喷浆头移动。
3.如权利要求2所述的一种建筑墙面施工机器人,其特征是,敲击组件包括有凹凸板(11),凹凸板(11)设置在抹平板(10)顶部,连接块(7)顶部设有固定板(12),固定板(12)上滑动式连接有震动杆(13),震动杆(13)和凹凸板(11)挤压配合,震动杆(13)和固定板(12)之间连接有第一弹性件(14)。
4.如权利要求3所述的一种建筑墙面施工机器人,其特征是,驱动组件包括有第二电机(15),第二电机(15)设置在凹凸板(11)靠近连接块(7)一侧上,第二电机(15)的输出轴连接有第二螺杆(16),第二螺杆(16)和凹凸板(11)转动式连接,第二螺杆(16)上螺纹式连接有滑块(160),滑块(160)和凹凸板(11)滑动式连接,滑块(160)和喷浆管的喷浆头固接。
5.如权利要求1所述的一种建筑墙面施工机器人,其特征是,刮平架(4)远离升降机构(3)的一侧为方形凹陷结构。
6.如权利要求1所述的一种建筑墙面施工机器人,其特征是,收集箱(9)设有出料管,将出料管和外接收集设备连通。
7.如权利要求6所述的一种建筑墙面施工机器人,其特征是,还包括有用于将多余的料推动集中的推料机构,推料机构包括有导向板(21),导向板(21)设置在刮平架(4)靠近连接块(7)一侧上,刮平架(4)远离连接块(7)一侧设置有固定架(18),导向板(21)滑动式连接有刮料板(20),刮料板(20)与刮平架(4)滑动式连接,刮料板(20)和固定架(18)之间连接有第二弹性件(19),刮料板(20)滑动式连接有对称设置的卡紧块(22),卡紧块(22)相互远离的一侧和刮料板(20)之间连接有第三弹性件(23),连接块(7)设有用于将卡紧块(22)向靠近连接块(7)的位置进行拉动的拉动组件。
8.如权利要求7所述的一种建筑墙面施工机器人,其特征是,拉动组件包括有楔形板(24),楔形板(24)连接在连接块(7)顶部,楔形板(24)和卡紧块(22)卡接配合,刮平架(4)靠近连接块(7)一侧设置有挤压架(25),挤压架(25)右部两侧均为斜面结构,挤压架(25)和卡紧块(22)挤压配合。
9.如权利要求8所述的一种建筑墙面施工机器人,其特征是,还包括有缓冲架(26),缓冲架(26)滑动式连接在固定架(18)上,缓冲架(26)左部和刮料板(20)挤压配合,缓冲架(26)和固定架(18)之间连接有第四弹性件(28)。
10.如权利要求9所述的一种建筑墙面施工机器人,其特征是,还包括有软块(27),软块(27)设置在缓冲架(26)上。
技术总结本发明公开一种建筑墙面施工机器人,涉及墙面粉刷技术领域,包括有移动台和移动机构,移动台底部设有移动机构,移动机构和外界控制系统通过控制模块电性连接,移动台上设有升降机构,升降机构和外界控制系统通过控制模块电性连接,升降机构上滑动式连接有刮平架,还包括有第一电机,第一电机设置在刮平架上,第一电机和外界控制系统通过控制模块电性连接,第一电机的输出连接有第一螺杆,刮平架靠近第一螺杆一侧滑动式连接有连接块。本发明通过升降机构带动刮平架上升将墙面上的水泥浆刮取下来的时候,通过第一电机带动第一螺杆转动,进而使得吸料头左右移动将刮除下来的水泥浆吸入收集箱内,如此能够实现自动回收水泥浆的目的。技术研发人员:傅林辉,章凉晨,付宏伟,黄德辉受保护的技术使用者:国智建(深圳)科技建设工程有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/289476.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表