一种车身盲区摄像头标定方法、装置、终端及存储介质与流程
- 国知局
- 2024-09-05 15:05:52
本申请涉及汽车盲区标定,尤其涉及一种车身盲区摄像头标定方法、装置、终端及存储介质。
背景技术:
1、商用车智能域控产品集成自动紧急刹车系统(autonomous emergency braking,aeb)、车辆盲点监测系统(blind spot detection,bsd)、汽车经销商管理系统(dealer-management-system,dms)等安全功能,包含9个摄像头,其中6个摄像头用于整个车身盲区感知,准确的标定是后续目标测距、测速精度高的保障,大多数情况下,是通过摆放特定标定物,建立标记物实际坐标和图像坐标映射关系进行标定相机角度,但是这种方式,消耗时间长,成本较高,操作复杂,标定场地要求平整且空旷。当要标定多个盲区摄像头的情况下,开发便捷、高效的摄像头标定方法是必要的。
技术实现思路
1、本申请提供了一种车身盲区摄像头标定方法、装置、终端及存储介质,以解决现有技术汽车盲区摄像头标定操作复杂且耗时长的问题。
2、第一方面,本申请提供了一种车身盲区摄像头标定方法,包括:
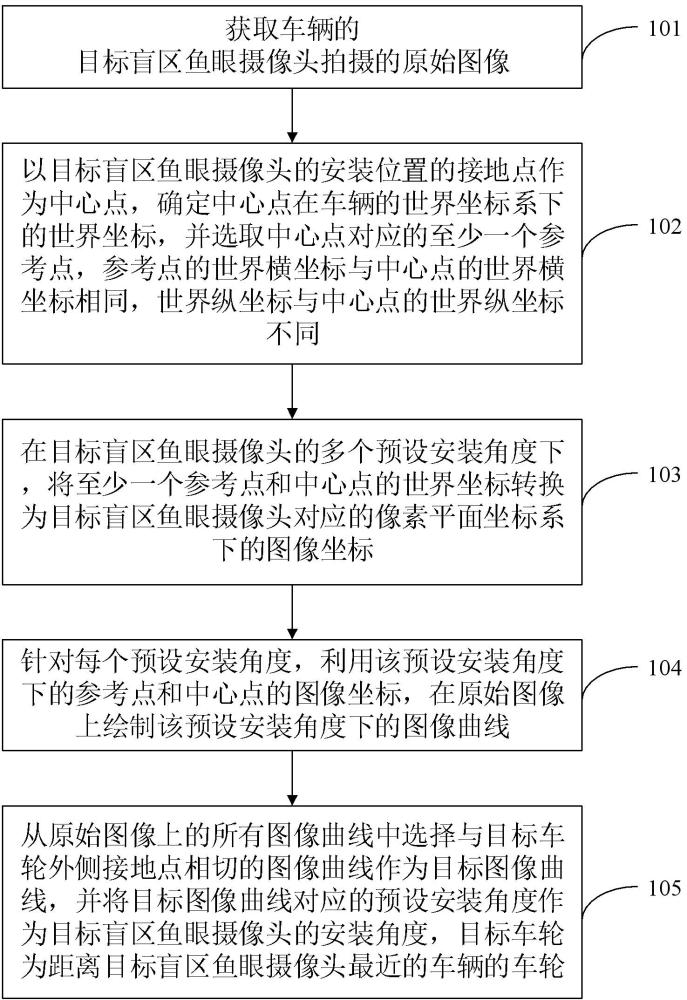
3、获取车辆的目标盲区鱼眼摄像头拍摄的原始图像;
4、以所述目标盲区鱼眼摄像头的安装位置的接地点作为中心点,确定所述中心点在所述车辆的世界坐标系下的世界坐标,并选取所述中心点对应的至少一个参考点,所述参考点的世界横坐标与所述中心点的世界横坐标相同,世界纵坐标与所述中心点的世界纵坐标不同;
5、在所述目标盲区鱼眼摄像头的多个预设安装角度下,将至少一个参考点和所述中心点的世界坐标转换为所述目标盲区鱼眼摄像头对应的像素平面坐标系下的图像坐标;
6、针对每个预设安装角度,利用该预设安装角度下的参考点和中心点的图像坐标,在所述原始图像上绘制该预设安装角度下的图像曲线;
7、从所述原始图像上的所有图像曲线中选择与目标车轮外侧接地点相切的图像曲线作为目标图像曲线,并将所述目标图像曲线对应的预设安装角度作为所述目标盲区鱼眼摄像头的安装角度,所述目标车轮为距离所述目标盲区鱼眼摄像头最近的车辆的车轮。
8、第二方面,本申请提供了一种车身盲区摄像头标定装置,包括:
9、图像获取模块,用于获取车辆的目标盲区鱼眼摄像头拍摄的原始图像;
10、参考点确定模块,用于以所述目标盲区鱼眼摄像头的安装位置的接地点作为中心点,确定所述中心点在所述车辆的世界坐标系下的世界坐标,并选取所述中心点对应的至少一个参考点,所述参考点的世界横坐标与所述中心点的世界横坐标相同,世界纵坐标与所述中心点的世界纵坐标不同;
11、图像坐标确定模块,用于在所述目标盲区鱼眼摄像头的多个预设安装角度下,将至少一个参考点和所述中心点的世界坐标转换为所述目标盲区鱼眼摄像头对应的像素平面坐标系下的图像坐标;
12、图像曲线绘制模块,用于针对每个预设安装角度,利用该预设安装角度下的参考点和中心点的图像坐标,在所述原始图像上绘制该预设安装角度下的图像曲线;
13、安装角度确定模块,用于从所述原始图像上的所有图像曲线中选择与目标车轮外侧接地点相切的图像曲线作为目标图像曲线,并将所述目标图像曲线对应的预设安装角度作为所述目标盲区鱼眼摄像头的安装角度,所述目标车轮为距离所述目标盲区鱼眼摄像头最近的车辆的车轮。
14、第三方面,本申请提供了一种终端,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
15、第四方面,本申请提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
16、本申请提供一种车身盲区摄像头标定方法、装置、终端及存储介质,通过获取车辆的目标盲区鱼眼摄像头拍摄的原始图像;以目标盲区鱼眼摄像头的安装位置的接地点作为中心点,确定中心点在车辆的世界坐标系下的世界坐标,并选取中心点对应的至少一个参考点,参考点的世界横坐标与中心点的世界横坐标相同,世界纵坐标与中心点的世界纵坐标不同;在目标盲区鱼眼摄像头的多个预设安装角度下,将至少一个参考点和中心点的世界坐标转换为目标盲区鱼眼摄像头对应的像素平面坐标系下的图像坐标;针对每个预设安装角度,利用该预设安装角度下的参考点和中心点的图像坐标,在原始图像上绘制该预设安装角度下的图像曲线;从原始图像上的所有图像曲线中选择与目标车轮外侧接地点相切的图像曲线作为目标图像曲线,并将目标图像曲线对应的预设安装角度作为目标盲区鱼眼摄像头的安装角度,目标车轮为距离目标盲区鱼眼摄像头最近的车辆的车轮。本申请通过将至少一个参考点和中心点的世界坐标转换为图像坐标,并在原始图像上绘制每个预设安装角度对应的图像曲线,并选择与目标车轮外侧接地点相切的图像曲线的预设安装角度作为目标盲区鱼眼摄像头的安装角度,不仅计算简单,对标定场地无特殊要求,标定时间几分钟即可完成;并且在保证盲区摄像头的安装角度的精度的前提下,缩短了盲区摄像头安装标定的时间,降低了盲区摄像头的安装成本。
技术特征:1.一种车身盲区摄像头标定方法,其特征在于,包括:
2.根据权利要求1所述的车身盲区摄像头标定方法,其特征在于,所述选取所述中心点对应的至少一个参考点,包括:
3.根据权利要求1所述的车身盲区摄像头标定方法,其特征在于,所述在所述目标盲区鱼眼摄像头的多个预设安装角度下,将至少一个参考点和所述中心点的世界坐标转换为所述目标盲区鱼眼摄像头对应的像素平面坐标系下的图像坐标,包括:
4.根据权利要求3所述的车身盲区摄像头标定方法,其特征在于,所述利用每个预设安装角度对应的外参,分别将相应预设安装角度下的至少一个参考点和所述中心点的世界坐标由世界坐标系转换至所述目标盲区鱼眼摄像头对应的相机坐标系下,得到至少一个参考点和所述中心点的第一坐标,包括:
5.根据权利要求3所述的车身盲区摄像头标定方法,其特征在于,所述将每个预设安装角度下的至少一个参考点和所述中心点的反畸变后的第一坐标分别转换为所述目标盲区鱼眼摄像头对应的像素平面坐标系下的图像坐标,包括:
6.根据权利要求3所述的车身盲区摄像头标定方法,其特征在于,所述外参包括旋转矩阵,所述预设安装角度包括俯仰角度、偏航角度和横滚角度;
7.根据权利要求6所述的车身盲区摄像头标定方法,其特征在于,所述外参包括平移矩阵,所述获取所述目标盲区鱼眼摄像头的每个预设安装角度对应的外参,包括:
8.一种车身盲区摄像头标定装置,其特征在于,包括:
9.一种终端,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如上的权利要求1至7中任一项所述车身盲区摄像头标定方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上的权利要求1至7中任一项所述车身盲区摄像头标定方法的步骤。
技术总结本申请提供一种车身盲区摄像头标定方法、装置、终端及存储介质。该方法包括:获取车辆的目标盲区鱼眼摄像头拍摄的原始图像;以目标盲区鱼眼摄像头安装位置接地点作为中心点,确定中心点在车辆世界坐标系下的世界坐标,选取中心点对应的至少一个参考点;在多个预设安装角度下,将世界坐标转换为图像坐标;针对每个预设安装角度,利用该预设安装角度下的参考点和中心点的图像坐标,在原始图像上绘制相应的图像曲线;选择与距离目标盲区鱼眼摄像头最近的车辆的车轮外侧接地点相切的图像曲线作为目标图像曲线,并将目标图像曲线的预设安装角度作为目标盲区鱼眼摄像头的安装角度。本申请能够提高安装角度的精度,缩短安装标定时间,降低安装成本。技术研发人员:徐显杰,高艳艳,包永亮,于彬,李东武,窦汝振受保护的技术使用者:天津所托瑞安汽车科技有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/289554.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。