一种用于认知雷达的多普勒滤波器的优化设计方法
- 国知局
- 2024-09-11 14:18:20
本发明属于雷达信号处理,具体涉及一种用于认知雷达的多普勒滤波器的优化设计方法。
背景技术:
1、机载雷达由于载机相对于地面运动,不同方位的杂波块与雷达的相对速度不同,杂波多普勒频谱展宽导致目标的检测性能下降。为解决这一问题,空时自适应处理(spacetime adaptive processing,stap)这一概念应运而生。stap方法常用于多普勒滤波器,以利用空时二维自由度可在角度-多普勒平面上区分目标与杂波,能够在杂波处自适应地形成凹口,有效提高信杂比。然而,在实际中,传统多普勒滤波器或stap滤波器难以完全抑制杂波,造成目标检测性能低。
技术实现思路
1、为了解决上述问题,本发明提供了一种用于认知雷达的多普勒滤波器的优化设计方法。本发明要解决的技术问题通过以下技术方案实现:
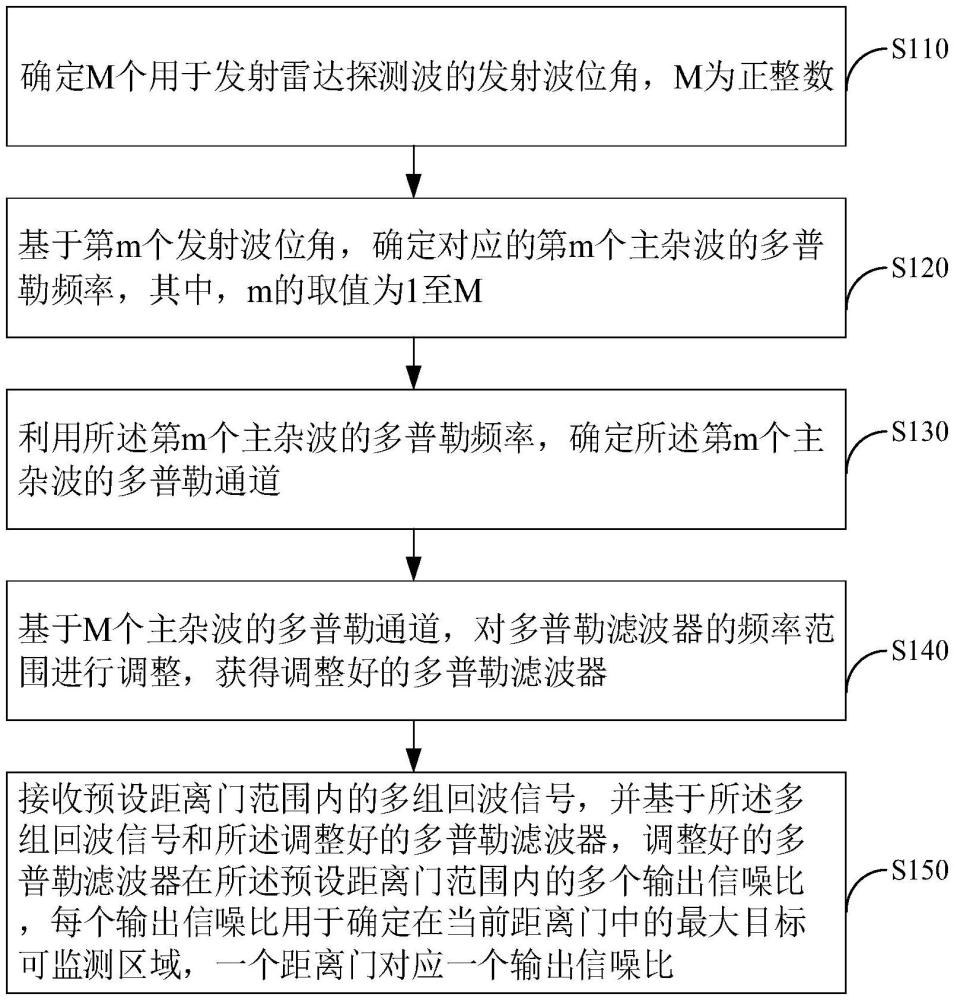
2、本发明提供一种用于认知雷达的多普勒滤波器的优化设计方法,包括:确定m个用于发射雷达探测波的发射波位角,m为正整数;基于第m个发射波位角,确定对应的第m个主杂波的多普勒频率,其中,m的取值为1至m;利用所述第m个主杂波的多普勒频率,确定所述第m个主杂波的多普勒通道;基于m个主杂波的多普勒通道,对多普勒滤波器的频率范围进行调整,获得调整好的多普勒滤波器;接收预设距离门范围内的多组回波信号,并基于所述多组回波信号和所述调整好的多普勒滤波器,确定所述调整好的多普勒滤波器在所述预设距离门范围内的多个输出信噪比,每个输出信噪比用于确定在当前距离门中的最大目标可监测区域,一个距离门对应一个输出信噪比。
3、在一些实施例中,所述确定m个用于发射雷达探测波的发射波位角,包括:步骤s1:获取所述第m个发射波位角,以及所述第m个发射波位角对应的波束宽度;当m为1时,第1个发射波位角为预设初始发射波位角;步骤s2:令相邻波束在3db波束宽度处相接,利用所述第m个发射波位角、所述第m个发射波位角对应的波束宽度,以及第m+1个发射波位角对应的波束宽度,反推求得所述第m+1个发射波位角;步骤s3:判断所述第m+1个发射波位角是否处于预设扫描角区间内;若处于,则令m=m+1,重复执行上述步骤s1至s3,若不处于,则停止计算,将计算出的处于所述预设扫描角区间的多个发射波位角,作为所述m个用于发射雷达探测波的发射波位角。
4、在一些实施例中,所述第m个主杂波的多普勒频率包括:第m个第一归一化多普勒频率和第m个第二归一化多普勒频率;所述第m个主杂波的多普勒通道包括:所述第m个第一归一化多普勒频率对应的多普勒通道,以及所述第m个第二归一化多普勒频率对应的多普勒通道;所述利用所述第m个主杂波的多普勒频率,确定所述第m个主杂波的多普勒通道,包括:获取所述多普勒滤波器的通道的中心频率的取值范围,其中,一个通道对应一个中心频率;从所述取值范围中,获取最接近所述第m个第一归一化多普勒频率的频率作为第一中心频率,其中,所述第一中心频率大于所述第m个第一归一化多普勒频率,以及获取最接近所述第m个第二归一化多普勒频率的频率作为第二中心频率,其中,所述第二中心频率大于所述第m个第二归一化多普勒频率;获取所述第一中心频率对应的多普勒通道,以及获取所述取值范围中的第三中心频率对应的多普勒通道,并利用所述第一中心频率对应的多普勒通道和所述第三中心频率对应的多普勒通道,确定所述第m个第一归一化多普勒频率对应的多普勒通道,其中,所述第三中心频率小于所述第m个第一归一化多普勒频率,且所述第三中心频率对应的多普勒通道与所述第一中心频率对应的多普勒通道相邻;获取所述第二中心频率对应的多普勒通道,以及获取所述取值范围中的第四中心频率对应的多普勒通道,并利用所述第二中心频率对应的多普勒通道和所述第四中心频率对应的多普勒通道,确定所述第m个第二归一化多普勒频率对应的多普勒通道,其中,所述第四中心频率小于所述第m个第二归一化多普勒频率,且所述第四中心频率对应的多普勒通道与所述第二中心频率对应的多普勒通道相邻。
5、在一些实施例中,所述第m个主杂波的多普勒频率包括:第m个第一归一化多普勒频率和第m个第二归一化多普勒频率;所述第m个第一归一化多普勒频率小于所述第m个第二归一化多普勒频率;所述第m个主杂波的多普勒通道包括:第一中心频率对应的多普勒通道和第二中心频率对应的多普勒通道;所述第一中心频率是所述多普勒滤波器的通道的中心频率的取值范围中,大于且最接近所述第m个第一归一化多普勒频率的频率,所述第二中心频率是所述取值范围中大于且最接近所述第m个第二归一化多普勒频率的频率;所述基于m个主杂波的多普勒通道,对多普勒滤波器的频率范围进行调整,获得调整好的多普勒滤波器,包括:对于所述第m个主杂波的多普勒频率,使用第一中心频率对应的多普勒通道的数值,对所述取值范围的下限值和所述第m个第一归一化多普勒频率构成的频率区间进行划分,获得多个第一子频率区间;使用第一差值,对所述第m个第一归一化多普勒频率和所述第m个第二归一化多普勒频率构成的频率区间进行划分,获得多个第二子频率区间,其中,所述第一差值是指所述第一中心频率对应的多普勒通道的数值与所述第二中心频率对应的多普勒通道的数值之间的差值;使用第二差值,对所述第m个第二归一化多普勒频率和所述取值范围的上限值构成的频率区间进行划分,获得多个第三子频率区间,其中,所述第二差值是指所述第二中心频率对应的多普勒通道的数值和预设发射脉冲数之间的差值;将所述多个第一子频率区间、所述多个第二子频率区间和所述多个第三子频率区间,作为第m个多普勒频率范围,继续确定第m+1个多普勒频率范围,直至获得第m个多普勒频率范围,将m个多普勒频率范围作为所述调整好的多普勒滤波器对应的新频率范围,获得所述调整好的多普勒滤波器。
6、在一些实施例中,在所述预设距离门范围内包括q个距离门,其中,一个距离门对应m组回波信号,一个发射波位角对应一组回波信号;所述接收预设距离门范围内的多组回波信号,并基于所述多组回波信号和所述调整好的多普勒滤波器,确定所述调整好的多普勒滤波器在所述预设距离门范围内的的多个输出信噪比,包括:对于第q个距离门,获取所述第q个距离门中的m组回波信号,q的取值范围为1至q,q为预设正整数;将所述m组回波信号输入所述调整好的多普勒滤波器中,以分别对所述m组回波信号进行降维处理,获得m组降维处理后的回波信号;获取目标空时导向矢量和所述预设距离门范围内的距离门的总数,以联合所述m组降维处理后的回波信号,求解获得m个最优权值;基于所述m个最优权值,确定m个信噪比,其中,一个最优权值对应一个信噪比;从所述m个信噪比中选取最大值,并将所述最大值作为所述第q个距离门对应的输出信噪比,继续确定第q+1个距离门对应的输出信噪比,直至获得第q个距离门对应的输出信噪比。
7、在一些实施例中,所述目标空时导向矢量通过以下步骤获得:获取时域降维矩阵、空域降维矩阵、目标时域导向矢量,以及目标空域导向矢量;利用所述时域降维矩阵和所述目标时域导向矢量,确定降维处理后的目标时域导向矢量;利用所述空域降维矩阵和所述目标空域导向矢量,确定降维处理后的目标空域导向矢量;对所述降维处理后的目标时域导向矢量和所述降维处理后的目标空域导向矢量进行克罗内克尔积处理,获得所述目标空时导向矢量。
8、在一些实施例中,所述第m+1个发射波位角的表达式为:
9、
10、
11、
12、其中,是所述第m个发射波位角对应的波束宽度,是指所述第m个发射波位角,λ是指波长,la是指天线孔径长度,是指所述第m+1个发射波位角对应的波束宽度,是指所述第m+1个发射波位角。
13、在一些实施例中,每个第一归一化多普勒频率和每个第二归一化多普勒频率的表达式分别为:
14、
15、
16、其中,fd0是指所述第一归一化多普勒频率,fd1是指所述第二归一化多普勒频率,v是指载机速度,λ是指波长,是指所述发射波位角,α是指预设航偏角,θ0是指预设主波束俯仰角,f是指预设脉冲重复频率。
17、在一些实施例中,每个最优权值的表达式为:
18、
19、
20、
21、其中,wopt是指所述最优权值,是指对所述降维处理后的回波信号进行最大似然估计获得的杂波加噪声的协方差矩阵,l是指距离门的编号,s0是指所述目标空时导向矢量,(·)h是指转置处理,l是指所述距离门的总数,是指所述降维处理后的回波信号,是指所述降维处理后的目标时域导向矢量,t是指时间领域,是指所述降维处理后的目标空域导向矢量,k是指空间领域,是指克罗内克尔积,f是指所述时域降维矩阵,t是指所述空域降维矩阵,st是指所述目标时域导向矢量,sk是指所述目标空域导向矢量。
22、在一些实施例中,每个输出信噪比的表达式为:
23、
24、其中,snrout是指所述输出信噪比,wopt是指所述最优权值,是指对所述降维处理后的回波信号进行最大似然估计获得的杂波加噪声的协方差矩阵,l是指距离门的编号,r是指空间内任意一点的空时导向矢量,(·)h是指转置处理,|·|2是指绝对值的平方。
25、本发明具有如下有益技术效果:针对传统多普勒滤波器或stap滤波器难以完全抑制杂波,造成目标检测性能低的问题,本发明提供了一种用于认知雷达的多普勒滤波器的优化设计方法,所述方法通过获取每个发射波位角对应的主杂波的多普勒频率;通过将多个主杂波的多普勒频率作为滤波器的中心频率,进而利用每个主杂波所处的多普勒通道,对多普勒滤波器的频率范围进行调整,获得调整好的多普勒滤波器;所述调整好的多普勒滤波器能够克服因目标的多普勒频率偏离滤波器的中心频率而导致目标增益下降,进而导致目标的检测性能降低的问题,并且所述调整好的多普勒滤波器具有更大的可检测面积,并且目标检测准确度更高,能够很好适应复杂的杂波场景。
26、以下将结合附图及实施例对本发明做进一步详细说明。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290123.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表