一种利用鸟类莱维飞行特性进行轨迹预测跟踪的方法与流程
- 国知局
- 2024-09-11 14:17:40
本发明涉及鸟类目标观测及跟踪,具体涉及一种利用鸟类莱维飞行特性进行轨迹预测跟踪的方法。
背景技术:
1、利用雷达设备对鸟类目标进行观测和跟踪时,首先需要对目标的运动类型进行建模,传统的运动模型有匀速直线运动模型cv、匀速转弯运动模型ct、匀加速运动模型ca等,这类模型简单而易于实现,但是实际跟踪过程中目标运动特性复杂,在目标运动发生机动时,单一特定的模型很难对目标进行精准地跟踪和定位。而imm模型可以描述多个运动模式之间的融合转换,灵活性较高,跟踪过程较为精准,但该模型计算复杂度很大,基于马尔科夫概率转移矩阵的计算实时性较低,使得模型切换缓慢。这类传统的建模方式都是基于目标运动的速度、加速度等基础特征进行建模分析的,而实际运动过程中,鸟类飞行轨迹符合莱维飞行特性模型,轨迹形态具有自相似性结构特征,基于大模型的神经网络可以通过复杂的超线性网络结构提取目标的莱维飞行特性。
2、目前基于深度学习方法建立目标运动模型的常见的方法有cnn、lstm、gru等,其中cnn是经典的卷积神经网络,擅长提取图片语音等局部依赖的数据,可以自动提取层次化特征,但对长序列数据的处理能力较弱,很难捕捉到序列中数据的全局关系,因此该网络对处理目标不同时间或空间维度下的位置序列问题不能发挥其网络优势。而相比于cnn,lstm是能够解决长序列之间建立数据依赖关系的问题,能够有效的解决梯度消失和梯度爆炸等问题,但该类网络模型参数较多,计算复杂度较高。针对lstm的参数和计算复杂性问题,gru对该模型进行了简化,计算效率有所提高,但对长序列数据的处理能力有限。为此,提出一种利用鸟类莱维飞行特性进行轨迹预测跟踪的方法。
技术实现思路
1、本发明所要解决的技术问题在于:如何解决传统建模方式的单一且理想化的问题以及cnn/lstm/gru网络对于长序列处理能力有限或效率不高的问题,提供了一种利用鸟类莱维飞行特性进行轨迹预测跟踪的方法,该方法采用基于transformer架构的超参数大模型对莱维飞行轨迹数据进行特征学习,生成基于莱维特性的预训练模型;再利用传感器采集的鸟类实际飞行数据进行迁移学习,以完成鸟类莱维飞行特性的建模。
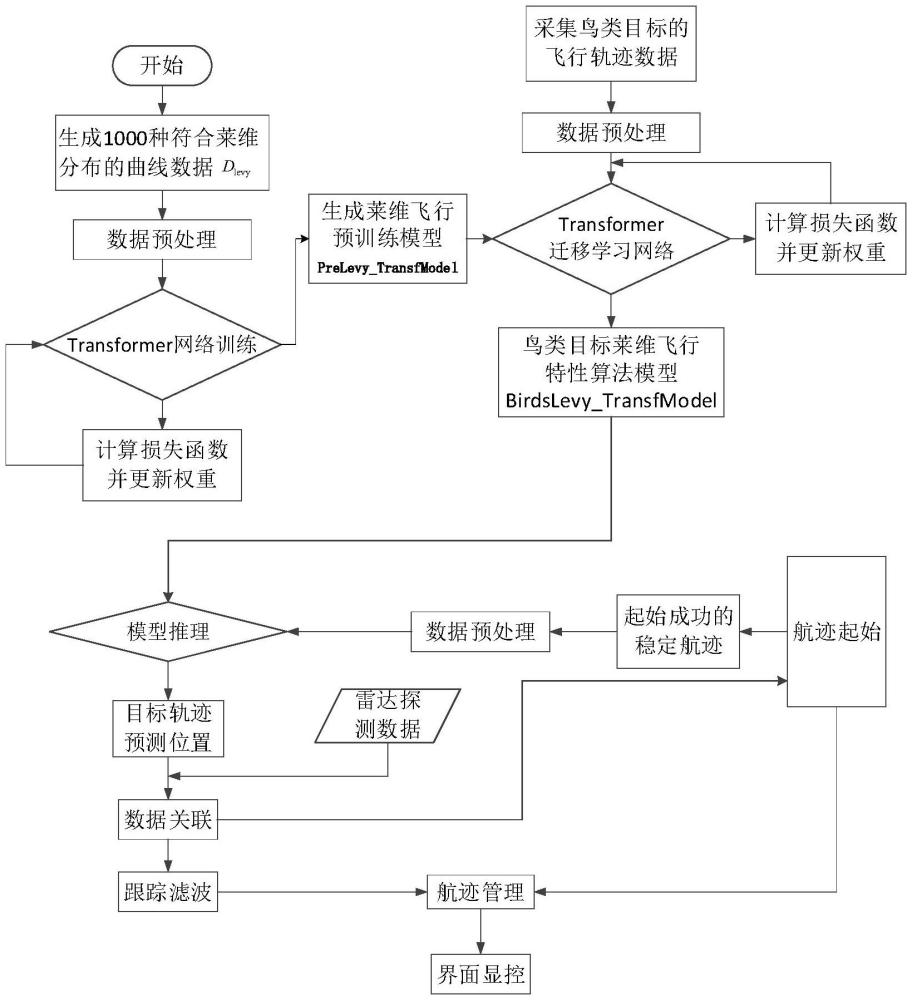
2、本发明是通过以下技术方案解决上述技术问题的,本发明包括以下步骤:
3、s1:数据获取
4、利用正态分布求解随机数法生成服从莱维分布的随机步长序列,作为仿真数据集dlevy,利用雷达设备采集鸟类目标实际飞行轨迹数据集dbirds;
5、s2:数据预处理
6、对步骤s1中生成的数据集dlevy和dbirds进行预处理,得到网络训练的序列数据dlevy'和dbirds',即网络训练的输入数据;
7、s3:预训练模型获取
8、构建基于transformer模型的深度学习网络环境,输入步骤s2中得到的序列数据dlevy'进行学习训练,利用自注意力机制提取随机步长序列中的莱维飞行特性,得到莱维飞行特性的预训练模型;
9、s4:模型迁移学习
10、利用步骤s2生成的序列数据dbirds'和步骤s3得到的预训练模型,构建基于transformer模型迁移学习网络环境,对序列数据dbirds'进行学习得到鸟类目标的莱维飞行特性,反复训练最终得到鸟类莱维飞行特性的算法模型;
11、s5:轨迹预测跟踪
12、对雷达探测数据进行点迹处理,得到航迹起始数据,作为步骤s4得到的鸟类莱维飞行特性算法模型的输入数据,再利用该算法模型对输入数据进行位置预测,得到目标预测位置信息,最后结合全局最近邻匹配算法和贝叶斯估计理论对目标实际位置进行关联滤波,从而实现对鸟类目标的跟踪。
13、更进一步地,在所述步骤s1中,获取仿真数据集dlevy的具体过程如下:
14、s11:利用正态分布求解随机数法生成服从莱维分布的随机步长序列的计算公式如下:
15、
16、其中,
17、s12:将莱维飞行方程表示如下:
18、st+1=st+α·*levy(β)
19、其中,α为步长缩放因子;
20、s13:随机取m对不同的(α,β)组合,产生m条不同形状和样式的莱维飞行轨迹曲线,在每条莱维飞行轨迹曲线中取x个采样点,形成仿真序列数据集dlevy,其中,m、x均为正整数。
21、更进一步地,在所述步骤s2中,具体处理过程如下:
22、s21:对仿真数据集dlevy进行预处理,得到网络训练的输入数据dlevy';
23、s22:对不同(α,β)参数组合因子下的m条莱维飞行轨迹数据进行周期分割,用连续前n个周期的采样点位置坐标值作为网络训练的一个输入样本,第n+1周期目标位置的坐标数据作为该样本位置预测的标签值;
24、s23:对雷达探测到的鸟类目标实际飞行轨迹数据集dbirds进行预处理,得到迁移学习网络训练的输入数据dbirds';
25、s24:对dbirds'中的序列进行周期分割,用连续前n个周期的采样点位置坐标值作为网络训练的一个输入样本,第n+1周期位置的坐标数据作为该样本位置预测的标签值。
26、更进一步地,在所述步骤s21中,预处理的方式包括清洗过滤;在所述步骤s23中,预处理的方式包括清洗过滤、数据剔除。
27、更进一步地,在所述步骤s3中,具体处理过程如下:
28、s31:在编码器的嵌入层,将输入样本的序列数据进行编码,使每个样本的坐标信息映射到固定维度的向量空间中,即得到token向量;再对token向量进行位置编码,以确保模型能够理解序列中元素的位置信息,最终生成适应模型输入的词嵌入矩阵;
29、s32:利用多头自注意力机制对序列中的词嵌入矩阵进行权重计算,捕捉向量之间的上下文语义和深层关系,输出样本序列的特征表示;
30、s33:解码器利用样本序列的特征表示,利用掩蔽自注意力机制计算当前位置的特征向量与之前所有位置的特征向量之间的相关性值,并将计算结果通过连接层映射到目标维度空间中,从而得到样本数据的下一周期的预测位置;
31、s34:计算损失函数并通过反向传播算法来更新解码器和编码器的参数,反复训练最终得到莱维飞行特性的预训练模型。
32、更进一步地,在所述步骤s4中,具体处理过程如下:
33、s41:构建基于transformer模型的预训练模型迁移学习网络环境;
34、s42:利用序列数据dbirds'对模型参数进行调整,反复训练最终得到鸟类莱维飞行特性的算法模型。
35、更进一步地,在所述步骤s5中,具体处理过程如下:
36、s51:计算雷达探测的原始点迹目标的三维坐标信息、目标信号强度和目标点云密度,并根据这些特征参数计算相关波门;
37、s52:利用滑窗法在不同周期的目标点迹之间做特征关联生成目标暂时航迹,当目标检测次数达到设定阈值时暂时航迹转为稳定航迹,小于阈值的航迹序列为暂时航迹,暂时航迹不能作为鸟类莱维飞行特性算法模型的输入样本;将稳定航迹序列作为鸟类莱维飞行特性算法模型的输入样本;
38、s53:利用编码器对输入数据进行位置编码和特征分析,得到输入数据的特征向量;
39、s54:利用鸟类莱维飞行特性的算法模型对输入数据的特征向量进行分析推理得到目标运动的预测位置坐标,即得到目标预测位置信息;
40、s55:根据预测位置在量测集中计算误差范围,建立航迹与量测集中点迹之间的关联概率矩阵;
41、s56:根据关联概率矩阵,采用全局最近邻算法得到航迹与点迹之间的匹配方案,该匹配方案反映每条航迹在量测集中是否匹配成功;若匹配不成功,将预测位置作为匹配结果,量测集不变;若匹配成功,匹配到的量测点作为匹配结果,该量测点从量测集中删除;
42、s57:利用贝叶斯估计理论,结合目标预测位置和匹配到的量测结果,得到后验估计作为目标位置的滤波值。
43、更进一步地,在所述步骤s52中,利用滑窗法在不同周期的目标原始点迹之间做特征关联的具体实现过程如下:
44、s521:将雷达第一次扫描得到的量测点迹作为航迹头,航迹头的目标检测次数为1,丢失次数为0,根据步骤s51得到的相关波门范围,对落入相关波门内的所有量测点迹建立连接,形成可能航迹;
45、s522:对每个可能航迹再利用最新点的相关波门进行外推,相关波门内没有量测时目标丢失次数加一,否则离外推点最近的点作为关联成功的点,此时目标检测次数加一;
46、s523:雷达连续扫描n个周期的时间窗内同一目标被检测到的次数达到指定门限m时即生成一条起始成功的航迹,即稳定航迹;否则将时间窗向增加时间的方向滑动一个扫描周期继续关联,当时间窗内目标跟丢次数超过(n-m)时,航迹丢弃。
47、更进一步地,在所述步骤s57中,目标位置的滤波值是通过目标预测位置和匹配到的量测结果的坐标值进行加权平均得到的。
48、本发明相比现有技术具有以下优点:该利用鸟类莱维飞行特性进行轨迹预测跟踪的方法,能够利用大模型对莱维飞行轨迹数据进行特征提取,再对鸟类目标运动轨迹数据进行迁移学习,得到一种针对鸟类目标莱维飞行特性的算法模型,该模型比传统运动模型更符合自然界鸟类目标运动特性。克服了传统运动特性建模方法的理想化与目标实际运动特性不符的缺点,具有模型分析准确、目标跟踪能力强等优点,可以减轻复杂电磁环境下高机动鸟类目标的跟踪难度。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290062.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。