一种无人车路面识别的方法与流程
- 国知局
- 2024-09-11 14:27:48
本发明涉及无人车路面识别领域,具体涉及一种无人车路面识别的方法。
背景技术:
1、目前,无人车的路面识别一般是通过摄像头采集车身周围的环境图片进行图像识别并通过激光雷达等传感器对车身周围的障碍物进行勘测,从而获得车身环境,识别当前路面,该方法适用于在城市工作的无人车。但是,有些无人车的工作环境复杂,如在树林环境工作,或在泥泞土路上工作等等,在这些工作环境内工作的无人车如果采用上述的方法来进行路面识别,比如采用摄像头采集周围环境图片,识别当前路面,会存在摄像头被泥污或树木遮盖的问题,这极大的影响了摄像头采集的周围环境图片的效果,极易造成错误判断,影响无人车正常工作。
技术实现思路
1、针对上述存在的问题,本发明提供一种无人车路面识别的方法,通过神经网络模型识别当前路面,避免了由于摄像头遮挡而导致路面识别出错的问题。
2、本发明的技术方案为:一种无人车路面识别的方法,包括以下步骤:
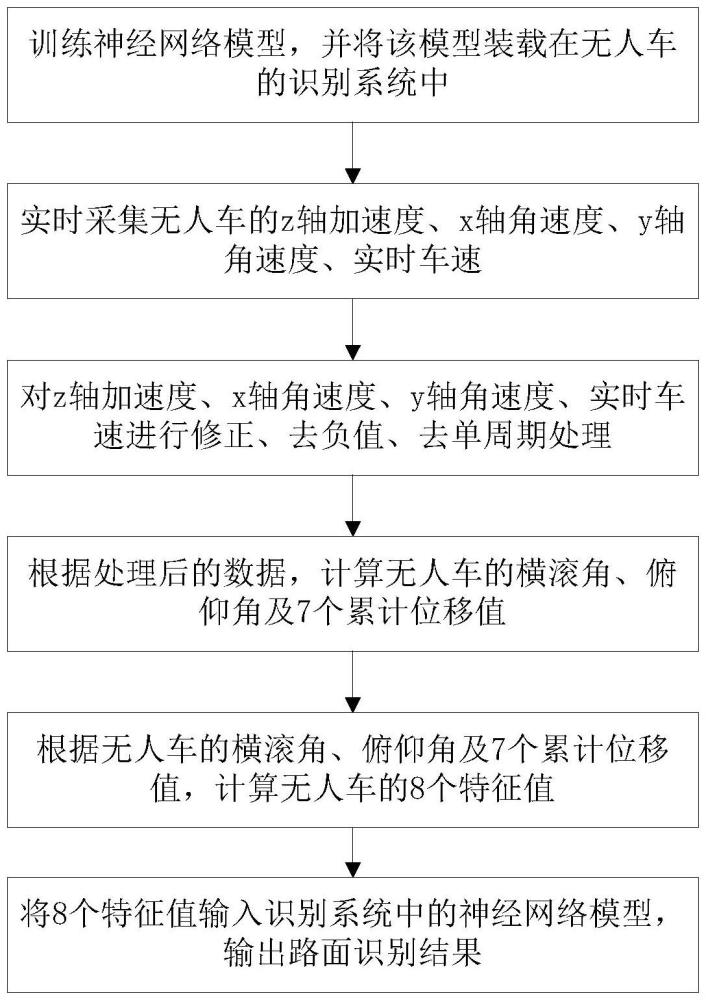
3、1)训练神经网络模型,并将训练后的神经网络模型装载在无人车的识别系统中;
4、2)实时采集无人车的z轴加速度az、x轴角速度wx、y轴角速度wy、实时车速v;
5、3)将采集z轴加速度az、x轴角速度wx、y轴角速度wy分别依次进行修正、去负值、去单周期的处理;
6、4)根据处理后的z轴加速度az计算竖向累计位移sz、颠簸横向累计位移sx1、无颠簸横向累计位移sx2,根据处理后的x轴角速度wx计算横滚角roll、横摆抖动横向累计位移sx3、无横摆横向累计位移sx4,根据处理后的y轴角速度wy计算俯仰角pitch、俯仰抖动横向累计位移sx5、无俯仰横摆横向累计位移sx6;
7、5)根据竖向累计位移sz、颠簸横向累计位移sx1、无颠簸横向累计位移sx2、横滚角roll、横摆抖动横向累计位移sx3、无横摆横向累计位移sx4、俯仰角pitch、俯仰抖动横向累计位移sx5、无俯仰横摆横向累计位移sx6计算8个特征值;
8、6)将8个特征值输入神经网络模型,神经网络模型输出识别路面。
9、优选地,所述步骤1)中,训练神经网络模型包括以下步骤:
10、1.1)设置多种环境的路面,并使无人车在设置的各种路面上分别进行移动;
11、1.2)分别采集无人车在各种路面上移动的z轴加速度az、x轴角速度wx、y轴角速度wy、实时车速v;
12、1.3)将采集z轴加速度az、x轴角速度wx、y轴角速度wy分别依次进行修正、去负值、去单周期的处理;
13、1.4)根据处理后的z轴加速度az计算竖向累计位移sz、颠簸横向累计位移sx1、无颠簸横向累计位移sx2,根据处理后的x轴角速度wx计算横滚角roll、横摆抖动横向累计位移sx3、无横摆横向累计位移sx4,根据处理后的y轴角速度wy计算俯仰角pitch、俯仰抖动横向累计位移sx5、无俯仰横摆横向累计位移sx6;
14、1.5)根据竖向累计位移sz、颠簸横向累计位移sx1、无颠簸横向累计位移sx2、横滚角roll、横摆抖动横向累计位移sx3、无横摆横向累计位移sx4、俯仰角pitch、俯仰抖动横向累计位移sx5、无俯仰横摆横向累计位移sx6计算8个特征值,并通过8个特征值训练神经网络模型。
15、优选地,所述步骤1.2)中,设置多种环境的路面包括柏油路面,泥泞路面,石头路面,细沙路面。
16、优选地,所述修正处理为:
17、y=x1-x_revise
18、式中,y为修正处理后的新数据值,x1为需要处理的采集数据值,x_revise为仪器误差值。
19、优选地,所述去负值处理为,当采集得到的数据值小于0时,将该数据值置为0。
20、优选地,所述去单周期处理为,当前采集数据值的前一时刻采集的数据值为0,后一时刻采集的数据值为0,则将当前采集数据值置为0。
21、优选地,所述8个特征值包括路面不平度、竖向位移平均值、竖向位移方差、陡坡剖切面积均值、陡坡剖切面积方差、小尺度横滚度变化、小尺度俯仰度变化、每米平均车速。
22、本发明的优点在于:由于不同道路环境下,不同的路面对无人车的冲击效果不同,因此本发明先通过采集无人车在不同的预设的已知路面上行驶的各种速度数据,如加速度、角速度、实时车速等,计算出无人车的8个特征值,通过这8个特征值训练神经网络模型,并将训练完成的神经网络模型装载在无人车上,使无人车在未知路面上通过将采集的各种速度数据计算出8个特征值,并将8个特征值输入神经网络模型,即可对路面进行识别,识别结果更加准确,使无人车能够做出更加精准的决策,避免了由于摄像头遮挡而导致路面识别出错的问题。
技术特征:1.一种无人车路面识别的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种无人车路面识别的方法,其特征在于:所述步骤1)中,训练神经网络模型包括以下步骤:
3.根据权利要求2所述的一种无人车路面识别的方法,其特征在于:所述步骤1.2)中,设置多种环境的路面包括柏油路面,泥泞路面,石头路面,细沙路面。
4.根据权利要求1或2所述的一种无人车路面识别的方法,其特征在于:所述修正处理为:
5.根据权利要求1或2所述的一种无人车路面识别的方法,其特征在于:所述去负值处理为,当采集得到的数据值小于0时,将该数据值置为0。
6.根据权利要求1或2所述的一种无人车路面识别的方法,其特征在于:所述去单周期处理为,当前采集数据值的前一时刻采集的数据值为0,后一时刻采集的数据值为0,则将当前采集数据值置为0。
7.根据权利要求1或2所述的一种无人车路面识别的方法,其特征在于:所述8个特征值包括路面不平度、竖向位移平均值、竖向位移方差、陡坡剖切面积均值、陡坡剖切面积方差、小尺度横滚度变化、小尺度俯仰度变化、每米平均车速。
技术总结一种无人车路面识别的方法,包括以下步骤:1)训练神经网络模型并装载在无人车的识别系统;2)采集z轴加速度、x轴角速度、y轴角速度、实时车速;3)将采集数据分别依次进行修正、去负值、去单周期处理;4)根据处理后的z轴加速度计算竖向累计位移、颠簸横向累计位移、无颠簸横向累计位移,根据处理后的x轴角速度计算横滚角、横摆抖动横向累计位移、无横摆横向累计位移,根据处理后的y轴角速度计算俯仰角、俯仰抖动横向累计位移、无俯仰横摆横向累计位移;5)计算8个特征值;6)将8个特征值输入神经网络模型,神经网络模型输出识别路面。技术研发人员:鲜洲,田雪勇受保护的技术使用者:重庆长安工业(集团)有限责任公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/290944.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。