集成TWS与TAS模式的雷达系统及其时间资源调度方法
- 国知局
- 2024-09-11 14:45:53
本发明涉及雷达,具体为一种集成tws与tas模式的雷达系统及其时间资源调度方法。
背景技术:
1、传统机械扫描式相控阵雷达通常使用边扫描边跟踪(tws:track-while-scan)技术,而利用相控阵天线具有可以灵活分配雷达资源、波束可以无惯性在任意时间指向任意位置的特点,可以使用搜索加跟踪(tas:trackand search)技术,以分配时间资源的方式进行波束的搜索和跟踪,tas方式跟踪与搜索波束完全独立,充分发挥相控阵天线波束捷变带来的高精度搜索特性。
2、tas模式下,雷达将部分时间和波束资源用于照射已发现的需要跟踪的目标,当要求同时跟踪的目标数较多时。tas将占用较多雷达资源,因此在考虑跟踪容量时,若没有较高精度的要求,一般采样tws模式。传统的单面相控阵雷达如果需要覆盖较大的扫描跟踪范围,就要依靠转台辅助相控阵进行全方位扫描,一般采用tws模式以保证跟踪容量,当要集成tws和tas模式时,通常需要使用四面相控阵,成本较高。
技术实现思路
1、本发明的目的在于提供一种集成tws与tas模式的雷达系统。
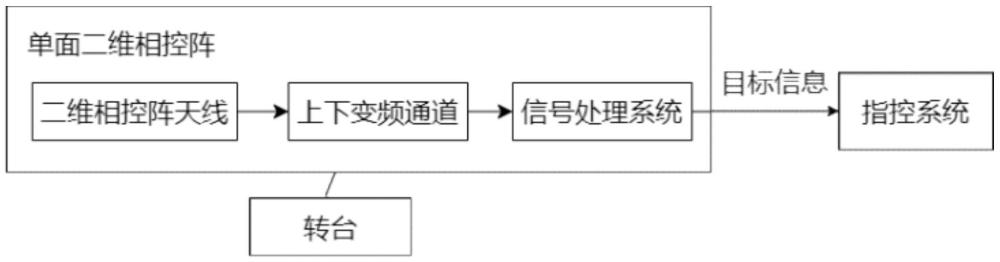
2、实现本发明目的的技术方案为:一种集成tws与tas模式的雷达系统,包括单面二维相控阵雷达系统、转台及指控系统,单面二维相控阵雷达系统设置在在转台通过转台实现360°方位旋转;所述单面二维相控阵雷达系统包括二维相控阵天线、上下变频通道、信号处理系统,二维相控阵天线接收信号,将信号送至上下变频通道,信号经上下变频通道处理后送至信号处理系统,信号处理系统将目标信息送至指控系统。
3、本发明还提出了一种集成tws与tas模式的雷达系统的时间资源调度方法,具体实现步骤为:
4、雷达开机,进行初始化设置,设立雷达威胁度门限w1,w2以及w3,w1<w2<w3;
5、雷达进入动态tws模式,利用转台旋转对方位360°进行机械扫描;
6、通过对所有阵元的相位和幅度进行配置,实现对俯仰区域0-n°进行电子扫描,并将探测到的目标信息以及输出至指控系统;此时搜索数据率为αhz,跟踪数据率为0,实现对于全空域(方位360°、俯仰0-n°)的目标探测,
7、信号处理系统实时计算目标威胁度wx并与雷达威胁度门限进行比较,当w2≥wx≥w1,且在本次动态tws模式下运行时间超过预设时间门限t0,则进入瞬态tws模式;当w3≥wx≥w2,且在本次动态tws模式下运行时间超过t0,则进入动态tas模式;当wx≥w3,则直接进入瞬态tas模式;否则,将保持原有模式,持续扫描并计算;
8、若进入瞬态tws模式,转台停止旋转,通过对所有阵元的相位和幅度进行配置,实现对方位90°、俯仰0-n°的空域进行扫描,搜索数据率为4αhz,跟踪数据率为0,并将探测到的目标信息以及输出至指控系统;
9、信号处理系统实时计算目标威胁度wx并与雷达威胁度门限进行比较,若wx<w1,且在本次瞬态tws模式下运行时间超过预设时间门限t0,进入动态tws模式;若w3≥wx≥w2,且在本次瞬态tws模式下运行时间超过t0,进入动态tas模式;若wx≥w3,则直接进入瞬态tas模式;否则,将保持原有模式,持续扫描并计算;
10、若进入动态tas模式,转台停止旋转,通过对所有阵元的相位进行配置,实现对方位90°、俯仰0-n°的空域进行扫描;此时雷达处于边搜索边跟踪模式,其中搜索波位数量为a,跟踪波位数量为b,搜索数据率为βhz,跟踪数据率为δhz,并将探测到的目标信息以及输出至指控系统;
11、信号处理系统实时计算目标威胁度wx并与雷达威胁度门限进行比较,若wx<w1,且在本次动态tas模式下运行时间超过预设时间门限t0,进入动态tws模式;若w2≥wx≥w1,且在本次动态tas模式下运行时间超过t0;若wx≥w3,则直接进入瞬态tas模式;否则,将保持原有模式,持续扫描并计算;
12、若进入瞬态tas模式,转台停止旋转,通过对所有阵元的相位和幅度进行配置,雷达只对目标进行跟踪,其中搜索波位数量为0,跟踪波位数量为c,搜索数据率为0,跟踪数据率为εhz,并将探测到的目标信息以及输出至指控系统。信号处理系统实时计算目标威胁度wx并与雷达威胁度门限进行比较,若wx<w1,且在本次瞬态tas模式下运行时间超过预设时间门限t0,进入动态tws模式;若w2≥wx≥w1,且在本次瞬态tas运行时间超过t0,则进入瞬态tws模式;若w3≥wx≥w2,且在本次瞬态tas模式下运行时间超过t0,则进入动态tas模式;否则,将保持原有模式,持续扫描并计算。
13、本发明与现有技术相比,其显著优点:1)本发明通过tws和tas结合的目标指示方法,实现对搜索和跟踪两方面需求的兼顾;2)本发明通根据实际应用场景灵活切换雷达工作模式,实现数据率的有效分配,提高系统的实时性能。
14、下面结合附图对本发明做进一步详细的描述。
技术特征:1.一种集成tws与tas模式的雷达系统,其特征在于,包括单面二维相控阵雷达系统、转台及指控系统,单面二维相控阵雷达系统设置在在转台通过转台实现360°方位旋转;所述单面二维相控阵雷达系统包括二维相控阵天线、上下变频通道、信号处理系统,二维相控阵天线接收信号,将信号送至上下变频通道,信号经上下变频通道处理后送至信号处理系统,信号处理系统将目标信息送至指控系统。
2.一种如权利要求1所述的集成tws与tas模式的雷达系统的时间资源调度方法,其特征在于,具体实现步骤为:
3.根据权利要求1所述的集成tws与tas模式的雷达系统的时间资源调度方法,其特征在于,计算目标威胁度wx的方法为:发现目标后,获取目标的先验信息,包括目标的位置x和速度信息v,利用速度距离威胁度公式计算得到单个目标威胁度,并以目标为中心,以雷达方位波束宽度为间隔,计算方位90°范围内的所有目标的威胁度,将威胁度相加后得到目标威胁度wx。
4.根据权利要求1所述的集成tws与tas模式的雷达系统的时间资源调度方法,其特征在于,速度距离威胁度公式具体为:
技术总结本发明公开了一种集成TWS与TAS模式的雷达系统及其时间资源调度方法,实现了对雷达时间资源的合理调度,以适应不同威胁度等级的目标。该方法包括:雷达开机,设置威胁度门限,默认进入动态TWS模式,进行360°水平机械扫描,俯仰0‑N°电子扫描,实时记录各方位目标威胁值;实时将威胁值与预设门限进行比较,根据威胁值不同,决策后进入瞬态TWS模式、动态TAS模式或瞬态TAS模式;在不同工作模式下实时记录并比较各方位目标威胁值;根据威胁值不同进行决策后重新选择不同工作模式。本发明通过调整转台状态维相控阵波束的配置,提高雷达资源利用率和自适应程度,从而提高了雷达系统在复杂环境下目标检测、跟踪的性能。技术研发人员:冉龙瑶,邹智薪,邹家华,花居驹,乔羽,王澳,蔡凌萍,孙之桢,李洪涛,陈胜垚受保护的技术使用者:南京理工大学技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/292070.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表