车联网车-车通信非平稳宽带无线信道建模方法
- 国知局
- 2024-09-11 14:49:23
本发明涉及车辆网无线通信,具体涉及一种车联网车-车通信非平稳宽带无线信道建模方法。
背景技术:
1、车-车通信是车联网中的重要组成部分,其可提供显著的安全效益,有望成为自主驾驶车辆的关键部件,还可以提供高吞吐量、低时延安全性和车辆之间的交通效率。高效、准确的无线信道模型是无线网络部署、通信系统优化等的重要依据,因而非常有必要开展车-车通信信道建模的研究。
2、当今,现有的车-车无线通信理论信道模型主要分为两大类:确定性模型和随机性模型。确定性信道建模方法使用电磁波传播理论求解麦克斯韦方程组,或者使用几何近似的数值方法来分析无线信道传播特性,具有特定场景下建模精度高的优点。射线跟踪法是一种典型确定性模型,该方法通过构建准确的电波传播环境,并模拟电波的直射、反射、散射、衍射等机理来分析信道衰落特性,该方法具有准确度高的优点,但是产生的计算量较大,在动态场景下往往会产生海量计算的负担。随机性模型利用信道传播特性的统计信息进行分析和建模,在信道模型的复杂性和准确性之间有一个较好的折衷,也是目前最常用的信道模型,众多模型中基于几何的随机模型最具有代表性。然而针对车联网车-车通信应用场景,现有的信道建模方法均未将车辆跟驰移动性以及车辆的变道行为考虑在内,难以刻画车辆行驶行为对信道非平稳性的影响。
技术实现思路
1、本发明的目的在于提供一种车联网车-车通信非平稳宽带无线信道建模方法,以解决上述背景技术中存在的至少一项技术问题。
2、为了实现上述目的,本发明采取了如下技术方案:
3、本发明提供一种车联网车-车通信非平稳宽带无线信道建模方法,包括:
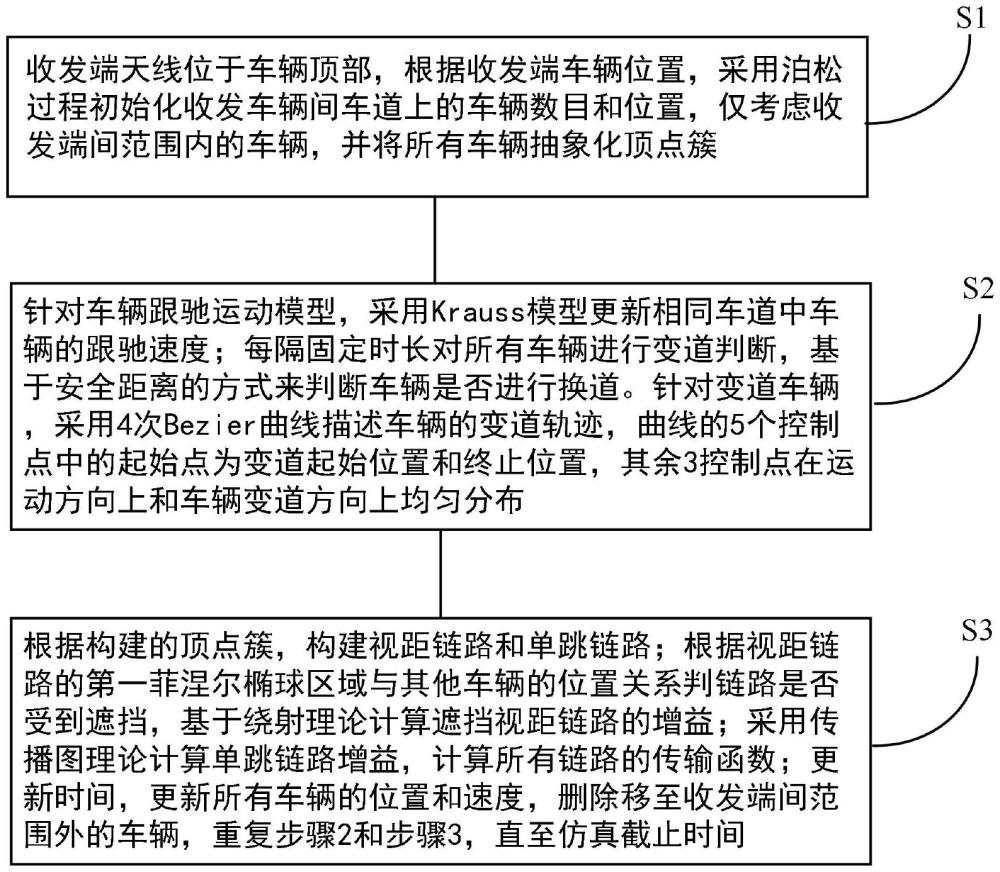
4、步骤1:收发端天线位于车辆顶部,根据收发端车辆位置,采用泊松过程初始化收发车辆间车道上的车辆数目和位置,仅考虑收发端间范围内的车辆,并将所有车辆抽象化顶点簇;
5、步骤2:针对车辆跟驰运动模型,采用krauss模型更新相同车道中车辆的跟驰速度;每隔固定时长对所有车辆进行变道判断,基于安全距离的方式来判断车辆是否进行换道;针对变道车辆,采用4次bezier曲线描述车辆的变道轨迹,曲线的5个控制点中的起始点为变道起始位置和终止位置,其余3个控制点在运动方向上和车辆变道方向上均匀分布;
6、步骤3:根据构建的顶点簇,构建视距链路和单跳链路;根据视距链路的第一菲涅尔椭球区域与其他车辆的位置关系判链路是否受到遮挡,基于绕射理论计算遮挡视距链路的增益;采用传播图理论计算单跳链路增益,计算所有链路的传输函数;更新时间,更新所有车辆的位置和速度,删除移至收发端间范围外的车辆,重复步骤2和步骤3,直至仿真截止时间。
7、进一步的,发端车辆和收端车辆的速度和位置是确定的,其他车辆的分布服从泊松过程,基于初始时刻、发端车辆中心的初始坐标、收端车辆中心的初始坐标,以车辆前行方向为x轴正方向,计算收发端间的每个车道内的其他车辆数目;同一车道内相邻两车的x坐标差服从指数分布;基于车辆的长宽高参数和车辆的中心位置,将每辆车抽象化为顶点簇,且簇内顶点数目为nm,对于车辆m而言,确定其簇内点n均匀分布的范围。
8、进一步的,采用krauss模型更新相同车道中车辆的跟驰速度,所有车辆速度更新时间间隔为δtc,将同一车道内前车和后车分别记为l和f,其在时间t的行驶速度分别为vl(t)和vf(t),为了保证后车的安全跟驰,后车f的行驶速度需满足:
9、
10、其中,g(t)为前后车的间隔,tr表示驾驶员反应时长,b为车辆刹车最大减速度。
11、进一步的,后车的安全速度为:
12、
13、考虑车辆和道路所允许的最高行驶速度vmax,则后车的期望行驶速度为:
14、vdes(t)=min{vmax,vsafe(t),v(t)+aδtc}
15、其中,a表示车辆的最大加速度;
16、考虑驾驶员的非理想操作,则在时间t+δtc时后车的实际行驶速度为:
17、vf(t+δtc)=max{0,vdes(t)-εa}
18、其中,ε为均匀分布在(0,1)间的随机变量。
19、进一步的,每隔固定时长δt对所有车辆进行变道判断,并采用基于安全距离的方式来判断车辆是否进行换道;
20、若车辆在时间t均满足以下4个条件则执行变道操作:
21、c1:g(t)<min{vdes(t),vmax}δtc
22、c2:go(t)>g(t)
23、c3:
24、c4:rand<pw
25、其中,go(t)表示后车与邻道前方车辆的间隔,go,b(t)表示后车与邻道后方车辆的间隔,vo,b(t)表示邻道后方车辆的行驶速度,rand是均匀分布在(0,1)间的随机变量,pw为预设的变道概率阈值。
26、进一步的,针对确定要变道的车辆,采用4次bezier曲线描述车辆的变道轨迹,其中曲线中的5个控制点中的起始点为变道起始位置和终止位置,其余3个控制点在运动方向上和车辆变道方向上均匀分布;基于设车辆m开始变道的时间为t、车辆沿x轴行驶速度为vm(t)、车辆变道所需的时长为δtw、结束变道的时间为t+δtw,计算5个控制点的坐标;根据上述5个控制点的坐标,计算得到车辆的变道轨迹。
27、进一步的,将发端车辆和收端车辆天线抽象化为点集合,分别记为和将收发端车辆范围内的其他车辆抽象化为顶点簇,记为且有1≤m≤m,其中m表示收发端范围内其他车辆的数目;根据收发端车辆的和其他车辆,构建视距链路和单跳链路,其中视距链路可表示为若视距链路的第一菲涅尔椭球区域内存在其他车辆等障碍物,则视距链路退化为遮挡链路,若完全遮挡住第一菲涅尔椭球区域,则视距链路消失;单跳链路可表示为且有1≤m≤m。
28、进一步的,第一菲涅尔椭球区域判别规则如下:对于车辆m,若其簇内点n的位置满足下列条件则视为该障碍物侵入了视距链路的第一菲涅尔椭球范围;若视距链路的第一菲涅尔椭球范围内存在多个障碍物,利用bullington方法将多个障碍物等效为一个单屏,进而计算其菲涅尔参数。
29、进一步的,采用传播图理论对视距/遮挡视距链路、单跳链路进行信道建模,基于任意两个不同簇间的顶点间的链路的频域传输函数,确定不同簇顶点间构成的边的增益;在考虑多天线条件下,则最终的多输入多输出信道的时变频域传输函数为视距分量和单跳分量之和,对多输入多输出信道的时变频域传输函数做傅里叶逆变换,即可得到对应的时变信道冲激响应。
30、进一步的,更新时间,更新所有车辆的位置和速度,删除移动至收发端间隔范围外的车辆;若当前时刻为信道演化时间间隔的整数倍,则生成泊松随机正整数作为新时刻的车辆数目;若当前车辆数目少于该随机数,则基于步骤1生成新的车辆。
31、本发明有益效果:根据收发端车辆位置,采用泊松过程初始化收发车辆间车道上的车辆数目和位置,仅考虑收发端间范围内的车辆,并将所有车辆抽象化顶点簇。针对车辆跟驰运动模型,采用krauss模型更新相同车道中车辆的跟驰速度;每隔固定时长对所有车辆进行变道判断,基于安全距离的方式来判断车辆是否进行换道。针对变道车辆,采用4次bezier曲线描述车辆的变道轨迹,曲线的5个控制点中的起始点为变道起始位置和终止位置,其余3个控制点在运动方向上和车辆变道方向上均匀分布。根据构建的顶点簇,构建视距链路和单跳链路;根据视距链路的第一菲涅尔椭球区域与其他车辆的位置关系判链路是否受到遮挡,基于绕射理论计算遮挡视距链路的增益;采用传播图理论计算单跳链路增益,计算所有链路的传输函数;更新时间,更新所有车辆的位置和速度,删除移至收发端间范围外的车辆,重复上述步骤,直至仿真截止时间。该方法弥补了现有车联网车车通信信道建模理论中未考虑车辆加速减速的移动模型和变道行为,为车联网车-车通信宽带无线信道建模提供了一种新方法。
32、本发明附加方面的优点,将在下述的描述部分中更加明显的给出,或通过本发明的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240911/292226.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表