一种钢瓶内壁处理机器人的制作方法
- 国知局
- 2024-09-11 15:13:31
本发明涉及机器人领域,具体涉及一种钢瓶内壁处理机器人。
背景技术:
1、随着工业自动化技术的不断发展,各行各业都在寻求提高生产效率、减少人工参与和保证产品质量的方法,近年来,钢瓶内壁处理机器人在工业领域得到广泛应用,传统的人工处理方式已无法满足现代生产线的效率和准确性要求,钢瓶内壁处理机器人能够自主完成钢瓶内壁信息的检测任务,无需人工干预,提高了生产效率和准确性。
2、现有的钢瓶内壁处理过程,尤其是钢瓶内壁检测过程中,经常会存在如下技术问题:
3、第一,传统的钢瓶检测广泛而无针对性,对所有可能有缺陷的钢瓶进行排查,增加了钢瓶检测所需要的时间和资源,缺乏针对性的检测导致效率检测降低;
4、第二,对钢瓶内壁进行图像采集过程中,由于拍摄方向的不准确,无法全面反映钢瓶内壁的实际状况,重点区域的低分辨率图像可能导致维修和检测难度增加;
5、第三,对于传统的钢瓶内壁的纹理特征数据提取方法自动化程度低,难以从局部提取出有效的纹理特征数据,且得到的纹理特征结果表示方式低效导致对后续的处理造成困难,无法准确识别出所有类型的内壁缺陷,也无法及时去除钢瓶内壁的锈蚀。
技术实现思路
1、本技术实现要素:部分用于以简要的形式介绍构思,这些构思将在后面的具体实施方式部分被详细描述。本发明内容部分并不旨在标识要求保护的技术方案的关键特征或必要特征,也不旨在用于限制所要求的保护的技术方案的范围。
2、本发明提出了一种钢瓶内壁处理机器人,来解决以上背景技术部分提到的技术问题中的一项或多项。
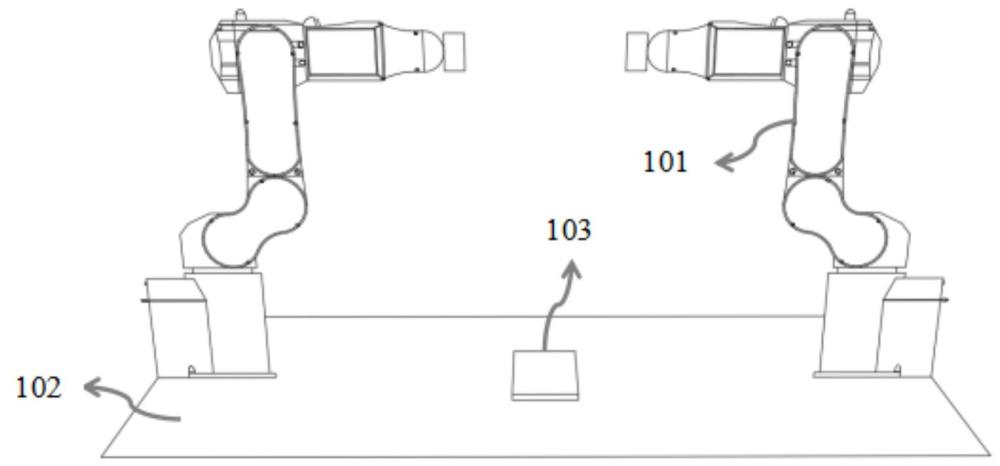
3、本发明提供了一种钢瓶内壁处理机器人,包括:两个机械臂,两个机械臂相互配合以将待检测钢瓶放置到检测台上,两个机械臂中的第一机械臂的末端设置有图像采集设备,两个机械臂中的第二机械臂的末端设置有标签读取设备;检测台,检测台用于放置待检测钢瓶,检测台上设置有多个定位传感器和定位标记,当待检测钢瓶被放置于定位标记对应的目标位置时,多个定位传感器向智能芯片发送表征待检测钢瓶放置完成的提示信息;智能芯片,智能芯片用于在接收到提示信息后,控制第二机械臂带动标签读取设备读取待检测钢瓶上设置的电子标签中的钢瓶信息,并对钢瓶信息进行解析,得到待检测钢瓶的多个属性信息和历史维修信息,多个属性信息包括生产日期、生产批次、钢瓶类型,历史维修信息包括多个维修记录,每个维修记录包括维修时间、维修位置、维修方式;智能芯片还用于根据生产日期确定待检测钢瓶的使用年限,并根据使用年限在预先配置的检测项目查询表中查询待检测钢瓶对应的多个检测项目,查询到的多个检测项目组成候选检测项目集合;根据生产批次在缺陷检测数据库中查询生产批次的钢瓶对应的多个内壁缺陷和每个内壁缺陷对应的历史检出次数;从多个内壁缺陷中选取历史检出次数大于预设检出次数的内壁缺陷作为待排查内壁缺陷,并将待排查内壁缺陷对应的检测项目加入候选检测项目集合,得到标准检测项目集合;智能芯片还用于根据标准检测项目集合,生成内壁检测方案,内壁检测方案包括图像采集指标,根据内壁检测方案控制第一机械臂带动图像采集设备对待检测钢瓶的内壁进行图像采集,得到内壁图像集合,内壁图像集合用于对待检测钢瓶的内壁进行处理。
4、可选的,图像采集指标包括纵向拍摄高度和横向旋转角度,纵向拍摄高度和横向旋转角度是通过以下步骤生成的:
5、根据钢瓶类型在预先配置的钢瓶分区方案库中进行匹配,得到待检测钢瓶对应钢瓶分区方案,钢瓶分区方案包括轴向分区数量和横向分区数量;
6、根据轴向分区数量,对待检测钢瓶进行轴向划分,得到多个轴向分区,并确定每个轴向分区对应的轴向高度区间;
7、根据横向分区数量,将多个轴向分区中每个轴向分区进行横向划分,得到每个轴向分区对应的多个横向分区,并确定每个横向分区对应的旋转角度区间,多个轴向分区分别对应的横向分区组成横向分区集合;
8、根据每个轴向分区对应的轴向高度区间和每个横向分区对应的旋转角度区间,确定横向分区集合中每个横向分区对应的图像采集指标,图像采集指标包括纵向拍摄高度和横向旋转角度。
9、可选的,图像采集指标包括图像采集分辨率,图像采集分辨率是通过以下步骤生成的:
10、根据维修时间和维修方式,生成多个维修记录中每个维修记录对应的复检评分,若复检评分大于预设的复检评分阈值,则将对应的维修记录所包含的维修位置确定为目标维修位置,并将目标维修位置在横向分区集合进行匹配,得到与目标维修位置匹配的横向分区并作为重点横向分区;
11、为横向分区集合中的重点横向分区配置第一图像采集分辨率,并为横向分区集合中除重点横向分区之外的其余横向分区配置第二图像采集分辨率,第一图像采集分辨率大于第二图像采集分辨率。
12、可选的,内壁检测方案是通过以下步骤生成的:
13、从预先配置的深度学习模型库中匹配每个检测项目对应的深度学习模型,得到标准检测项目集合对应的深度学习模型集合;
14、将深度学习模型集合和图像采集指标组成内壁检测方案。
15、本发明具有如下有益效果:
16、1、检测台上设置有多个定位传感器和定位标记,提高了放置待检测钢瓶到目标位置的精度,增强了检测效率;除此之外,智能芯片根据使用年限在预先配置的检测项目查询表中查询待检测钢瓶对应的多个检测项目,通过使用年限可以避免对未达到检测周期的钢瓶进行不必要的检测,确保检测的针对性,从而节省检测资源和成本;根据生产批次在缺陷检测数据库中查询生产批次的钢瓶对应的多个内壁缺陷和每个内壁缺陷对应的历史检出次数,可以迅速了解该生产批次钢瓶的内壁缺陷,有针对性地进行检测,提高检测效率;根据标准检测项目集合,生成内壁检测方案,通过遵循标准检测项目,可以确保生成内壁检测方案的科学性;
17、2、纵向拍摄高度和横向旋转角度可以精准地捕捉钢瓶的特定部位,能够全面拍摄到钢瓶的任一区域,提高后续图像分析的效率;对重点的目标维修位置配置更高的图像采集分辨率,使得采集到的图像能够提供更多的信息,从而得到更加科学、准确的内壁检测方案;
18、3、智能芯片对纹理特征数据的提取过程中,通过将图像分割为多个图像块,提高了局部处理过程的效率;通过邻域像素与中心像素比较,能够捕捉到局部纹理特征的变化,而且通过领域像素和中心像素比较得到的编码为二进制数,提供了一种高效的纹理特征表示方式,便于后续对图像的纹理特征识别,计算简单高效且自动化程度高,预先训练的网络能够快速处理输入的纹理特征数据,快速识别出各种内壁缺陷的类型,及时除锈可以避免因锈蚀引起的潜在安全风险。
技术特征:1.一种钢瓶内壁处理机器人,其特征在于,包括:
2.根据权利要求1所述的钢瓶内壁处理机器人,其特征在于,所述图像采集指标包括纵向拍摄高度和横向旋转角度,所述纵向拍摄高度和横向旋转角度是通过以下步骤生成的:
3.根据权利要求2所述的钢瓶内壁处理机器人,其特征在于,所述图像采集指标包括图像采集分辨率,所述图像采集分辨率是通过以下步骤生成的:
4.根据权利要求3所述的钢瓶内壁处理机器人,其特征在于,所述内壁检测方案是通过以下步骤生成的:
5.根据权利要求4所述的钢瓶内壁处理机器人,其特征在于,还包括显示设备;以及
技术总结本发明涉及机器人领域,公开了一种钢瓶内壁处理机器人,包括:两个机械臂相互配合以将待检测钢瓶放置到检测台上;检测台用于放置待检测钢瓶;智能芯片用于在接收到提示信息后,控制第二机械臂带动标签读取设备读取待检测钢瓶上设置的电子标签中的钢瓶信息,并对钢瓶信息进行解析,得到待检测钢瓶的多个属性信息和历史维修信息;智能芯片还用于根据生产日期确定待检测钢瓶的使用年限,并根据使用年限在预先配置的检测项目查询表中查询待检测钢瓶对应的多个检测项目;智能芯片还用于根据标准检测项目集合,生成内壁检测方案。由此,提高了钢瓶的使用安全性和使用效率。技术研发人员:王林章,赵光明,孙贵锁,许尧龙,刘森,马海龙受保护的技术使用者:北京首钢气体有限公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/293617.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。