作业机械末端执行器控制方法、装置及作业机械与流程
- 国知局
- 2024-09-11 15:02:17
本发明涉及作业机械,具体地涉及一种作业机械末端执行器控制方法、一种作业机械末端执行器控制方法装置、一种作业机械、一种机器可读存储介质及一种电子设备。
背景技术:
1、有很多作业机械具有类似扫平、打磨的功能,比如:平地机、挖掘机等。其中,平地机可以对地面进行平整和压实。挖掘机可以进行扫平,通过保持挖掘机铲斗底板与地面平行且轻微接触,操作控制挖掘机铲斗前后左右移动,到达平整地面的作用。上述作业机械在进行类似扫平或打磨作业时,是通过控制作业机械的末端执行器接触作业对象来实现的。
2、然而,现有的作业机械在进行类似扫平、打磨作业时,没有考虑作业对象的硬度,如果作业路径上存在质地坚硬且凸起的硬物,则容易造成末端执行器发生严重磨损,甚至开裂,影响结构完整性,从而降低施工效率。
技术实现思路
1、本发明实施例的目的是提供一种作业机械末端执行器控制方法、一种作业机械末端执行器控制方法装置、一种作业机械、一种机器可读存储介质及一种电子设备,该作业机械末端执行器控制方法利用阻抗控制实现末端执行器柔性作业,能够避免末端执行器与作业表面的接触物发生刚性碰撞,造成末端执行器损伤,保证了作业机械的安全,从而有助于保证施工效率。
2、为了实现上述目的,本技术第一方面提供一种作业机械末端执行器控制方法,包括:
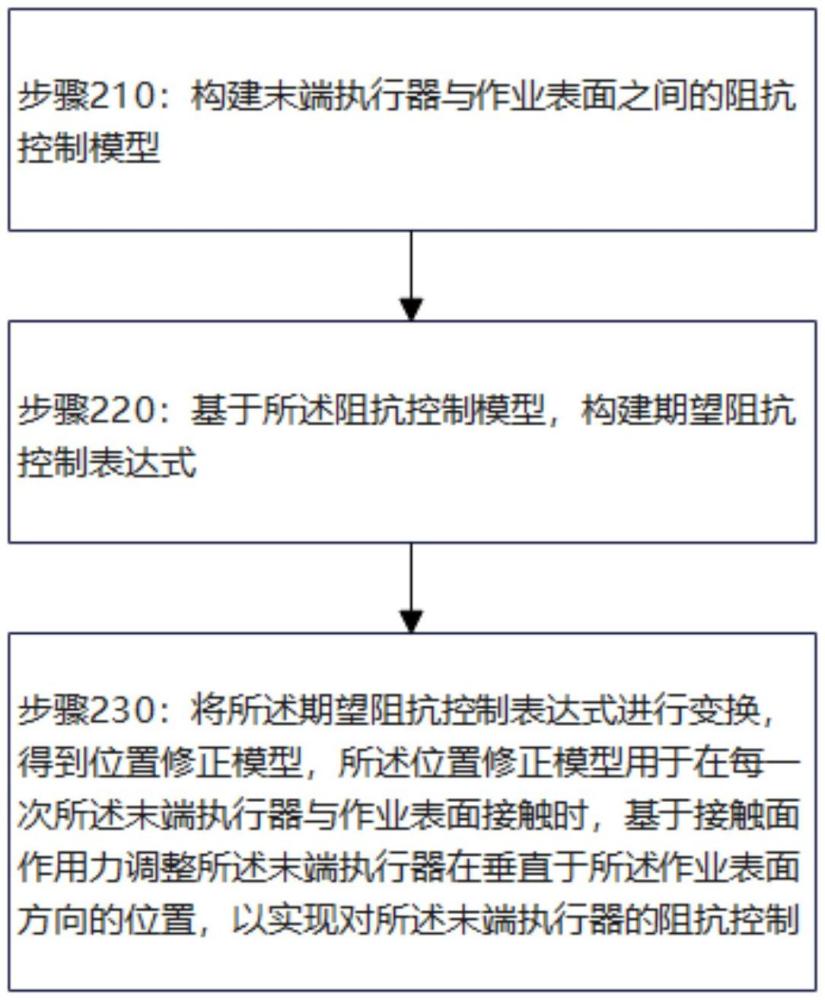
3、构建末端执行器与作业表面之间的阻抗控制模型;
4、基于所述阻抗控制模型,构建期望阻抗控制表达式;
5、将所述期望阻抗控制表达式进行变换,得到位置修正模型,所述位置修正模型用于在每一次所述末端执行器与作业表面接触时,基于接触面作用力调整所述末端执行器在垂直于所述作业表面方向的位置,以实现对所述末端执行器的阻抗控制。
6、在本技术实施例中,所述将所述期望阻抗控制表达式进行变换,得到位置修正模型,包括:
7、将所述期望阻抗控制表达式进行频域变换,得到目标导纳方程;
8、将所述目标导纳方程进行离散化处理,得到z变换表达式;
9、基于所述z变换表达式,得到所述末端执行器的位移表达式;
10、将所述末端执行器的位移表达式进行逆z变换,得到位置修正模型。
11、在本技术实施例中,所述将所述期望阻抗控制表达式进行频域变换,得到目标导纳方程,包括:
12、将所述期望阻抗控制表达式进行频域变换,得到阻抗控制频域变换;
13、将所述阻抗控制频域变换转换为多阶系统的标准形式;
14、基于所述多阶系统的标准形式,确定得到阻抗控制参数;
15、将所述阻抗控制参数代入所述阻抗控制频域变换,得到目标导纳方程。
16、在本技术实施例中,所述期望阻抗控制表达式为:
17、
18、其中,m是期望末端执行器惯性,b为期望阻尼,k为期望刚度,f是末端执行器的压力,e=zb-zr,其中zb是实际末端执行器距离作业表面的高度,zr是期望末端执行器距离作业表面的高度。
19、在本技术实施例中,所述方法还包括:
20、控制所述作业机械的末端执行器按照预置的参考作业轨迹进行运动;
21、获取当前时刻末端执行器的压力、历史时刻末端执行器的压力和历史时刻的末端执行器的修正位置,所述末端执行器的压力为在所述末端执行器与作业表面接触时,所述作业表面与所述末端执行器之间所产生的作用力;
22、基于所述当前时刻末端执行器的压力、历史时刻末端执行器的压力和历史时刻的末端执行器的修正位置,按照所述位置修正模型进行计算,得到当前时刻末端执行器的修正位置;
23、基于所述当前时刻末端执行器的修正位置,调整所述预置的参考作业轨迹中对应末端执行器的位置。
24、在本技术实施例中,所述位置修正模型表示为:
25、e(n)=ae(n-1)+be(n-2)+c(f(n)+2f(n-1)+f(n-2)),
26、其中,w1=4m+2bt+kt2,w2=-8m+2kt2,w3=4m-2bt+kt2,t为采样周期,m为期望末端执行器惯性,b为期望阻尼,k为期望刚度,e(n)为当前时刻末端执行器垂直于作业表面方向上的位移,f(n)为当前时刻末端执行器的压力,n代表当前时刻,n-1为上一时刻,n-2为上两个时刻,f(n-1)为上一时刻末端执行器的压力,f(n-2)为上两个时刻末端执行器的压力,e(n-1)为上一时刻末端执行器垂直于作业表面方向上的位移,e(n-2)为上两个时刻末端执行器垂直于作业表面方向上的位移。
27、在本技术实施例中,所述获取当前时刻末端执行器的压力,包括:
28、通过安装于所述末端执行器与作业表面接触的一面上的薄膜压力传感器获取当前时刻末端执行器的压力。
29、在本技术实施例中,所述获取当前时刻末端执行器的压力,包括:
30、获取当前时刻末端执行器的初始压力;
31、将所述初始压力进行滤波处理,得到当前时刻末端执行器的压力。
32、本技术第二方面一种作业机械末端执行器控制方法装置,包括:
33、第一构建模块,用于构建末端执行器与作业表面之间的阻抗控制模型;
34、第二构建模块,用于基于所述阻抗控制模型,构建期望阻抗控制表达式;
35、变换模块,用于将所述期望阻抗控制表达式进行变换,得到位置修正模型,所述位置修正模型用于在每一次所述末端执行器与作业表面接触时,基于接触面作用力调整所述末端执行器在垂直于所述作业表面方向的位置,以实现阻抗控制。
36、本技术第三方面一种作业机械,包括末端执行器,所述末端执行器采用上述的作业机械末端执行器控制方法进行控制。
37、本技术第四方面提供一种电子设备,该电子设备包括:
38、至少一个处理器;
39、存储器,与所述至少一个处理器连接;
40、其中,所述存储器存储有能被所述至少一个处理器执行的指令,所述至少一个处理器通过执行所述存储器存储的指令实现上述的作业机械末端执行器控制方法。
41、本技术第五方面提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令在被处理器执行时使得所述处理器被配置成执行上述的作业机械末端执行器控制方法。
42、通过上述技术方案,通过构建末端执行器与作业表面之间的阻抗控制模型;基于所述阻抗控制模型,构建期望阻抗控制表达式;将所述期望阻抗控制表达式进行变换,得到位置修正模型,所述位置修正模型用于在每一次所述末端执行器与作业表面接触时,基于接触面作用力调整所述末端执行器在垂直于所述作业表面方向的位置,以实现对所述末端执行器的阻抗控制。通过将期望阻抗控制表达式转化为位置修正模型,以便于根据末端执行器与作业表面之间的作用力来调整末端执行器的位置,实现末端执行器柔性作业,能够避免末端执行器与作业表面的接触物发生刚性碰撞,造成末端执行器损伤,保证了作业机械的安全,从而有助于保证施工效率。通过将期望阻抗控制表达式转化为位置修正模型使得控制更加简便。
43、本发明实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
本文地址:https://www.jishuxx.com/zhuanli/20240911/292956.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表