一种远程控制的医疗陪护机器人的制作方法
- 国知局
- 2024-09-11 14:44:07
本发明涉及机器人,具体为一种远程控制的医疗陪护机器人。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器,机器人能够通过编程和自动控制来执行诸如作业或移动等任务,机器人具有有坐、起、拜、伏等能力还具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围;
2、医疗陪护机器人主要用于对移动不便的患者进行陪护,便于根据移动不便的患者需求,实现对患者的体态姿势进行智能调节,让移动不便的患者在康复期间更为的舒适,但现有的医疗陪护机器人不能对患者的体态进行很好的调控,进而易出现在对患者俯仰角度调节时,患者极易出现偏斜滑动,对移动不便的患者造成不适,影响使用体验的情况。
3、针对现有问题,急需在原有的基础上进行创新。
技术实现思路
1、本发明的目的在于提供一种远程控制的医疗陪护机器人,以解决上述背景技术中提出的现有的医疗陪护机器人不能对患者的体态进行很好的调控,进而易出现在对患者俯仰角度调节时,患者极易出现偏斜滑动,对移动不便的患者造成不适,影响使用体验的情况。
2、为实现上述目的,本发明提供如下技术方案:一种远程控制的医疗陪护机器人,包括硬件系统和控制系统;
3、其中,硬件系统包括支撑底座和支撑底座上安装的承托架,所述承托架的内侧安装有用于调节第一承托板倾斜角度的第一顶升机构,并且第一承托板的边侧设置有第二承托板,所述第二承托板上安装有用于调节倾斜角度的第二顶升机构;
4、所述第一承托板上固定设置有固定座,且固定座的两侧设置有用于承重的第一承托片和第三承托片,且第二承托板上设置有第二承托片,并且第二承托片与第一承托片之间设置有用于转动缓冲的弹性隔片;
5、所述控制系统包括计算模块、控制模块和存储模块,所述控制模块用于对电控设备进行控制。
6、作为本发明所述远程控制的医疗陪护机器人的一种可选方案,其中:所述第一承托片的内侧设置有传动滚轴,且传动滚轴的边侧设置有定位板,并且定位板的外壁固定设置有驱动电机,同时驱动电机的输出轴与传动滚轴固定连接。
7、作为本发明所述远程控制的医疗陪护机器人的一种可选方案,其中:所述定位板的边侧设置有支撑板,且支撑板的外壁设置有用于收纳限位机构的收纳机构,并且收纳机构包括收纳壳体和限位槽,同时收纳壳体的内侧开设有限位槽。
8、作为本发明所述远程控制的医疗陪护机器人的一种可选方案,其中:所述收纳机构还包括活动块和连接凹槽,所述活动块嵌入设置于限位槽的内部,且活动块的内部开设有连接凹槽。
9、作为本发明所述远程控制的医疗陪护机器人的一种可选方案,其中:所述收纳壳体的内壁设置有抵压杆,且抵压杆的端部设置有活动机构,所述活动机构包括波纹弹性件、活动杆和封堵块,且波纹弹性件的内侧设置有活动杆,并且活动杆的端部设置有封堵块,所述收纳壳体的边侧设置有进气管,且进气管的端部设置有抽吸泵。
10、作为本发明所述远程控制的医疗陪护机器人的一种可选方案,其中:所述活动块的顶部设置有限位机构,且限位机构包括限位套杆、透气槽、滑动槽和伸缩片,并且限位套杆的内部开设有透气槽,同时透气槽的两侧设置有滑动槽,并且滑动槽的内侧设置有伸缩片,所述限位套杆的外侧设置有连接通孔,且连接通孔开设于第一承托片的表面。
11、作为本发明所述远程控制的医疗陪护机器人的一种可选方案,其中:电控设备包括第一顶升机构、驱动电机、第二顶升机构、感应模块和语音控制模块;
12、其中,感应模块安装于支撑板表面,用于对第一承托片、第二承托片和第三承托片承重分析;
13、支撑板设置有若干个,将若干个支撑板上设置的感应模块命名为第一感应模块、第二感应模块、第三感应模块……和第i感应模块,i与支撑板数量相等;
14、分别获取第一感应模块信息、第二感应模块信息、第三感应模块信息……和第i感应模块信息,并将获取的信息存储到存储器内;
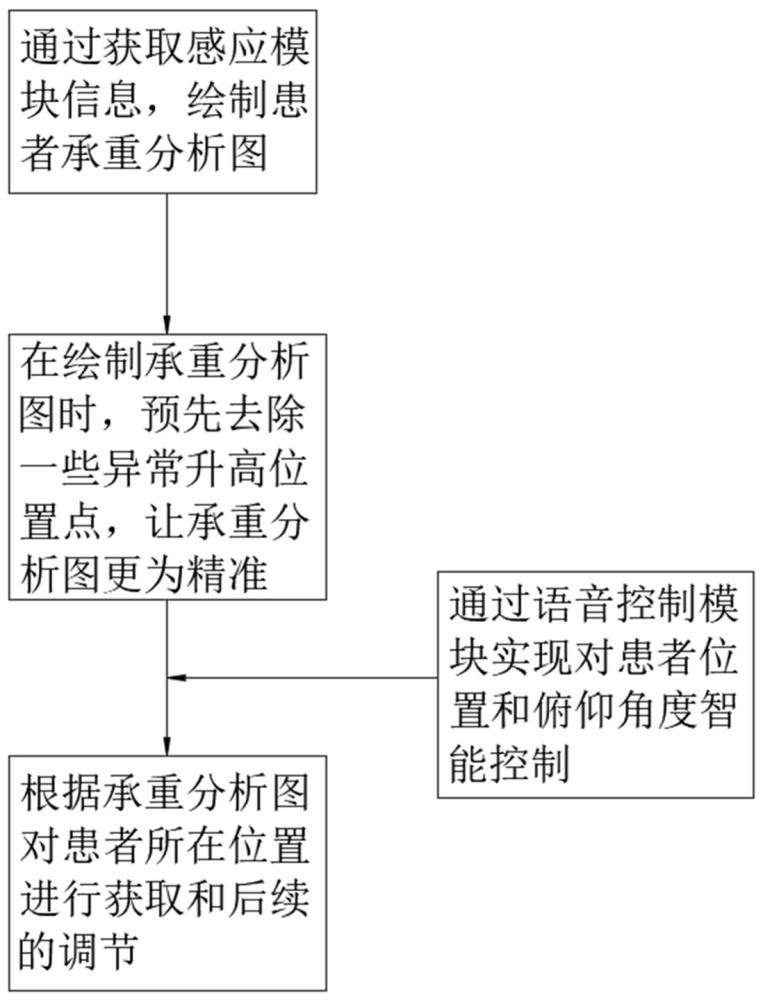
15、通过对存储器内存储的第一感应模块信息、第二感应模块信息、第三感应模块信息……和第i感应模块信息进行整合,绘制承重分析图。
16、作为本发明所述远程控制的医疗陪护机器人的一种可选方案,其中:承重分析图的绘制包括:
17、获取第一感应模块信息、第二感应模块信息、第三感应模块信息……和第i感应模块信息,将第一感应模块信息、第二感应模块信息、第三感应模块信息……和第i感应模块信息中异常升高的位置点进行记录;
18、通过对异常升高的位置点进行整合,得到异常升高位置点分散图;
19、根据异常升高位置点分散图,将相邻的异常升高位置点进行连接;
20、相邻的异常升高位置点进行连接时预先进行对接距离判定;
21、通过将对接距离与判定阈值进行比对;
22、若对接距离落入判定阈值内,正常对相邻的异常升高位置点进行连接;
23、若对接距离没有落入判定阈值内,对相邻的异常升高位置点进行标记,选取其它相邻点的异常升高位置点进行连接;
24、获取标记异常升高位置点,以标记异常升高位置点为初始中心,向外围进行扩散,确定标记异常升高位置点外围是否存在对接距离落入判定阈值内的异常升高位置点;
25、若标记异常升高位置外围不存在落入判定阈值内的异常升高位置点,在绘制承重分析图时,将该点进行舍弃;
26、若标记异常升高位置外围存在落入判定阈值内的异常升高位置点,将落入判定阈值内的异常升高位置点作为新的初始中心,计算新的初始中心外围异常升高位置点对接距离时,优先去除计算过的对接距离,并依次重复这一步骤,直到新的对接距离外围不存在落入判定阈值内的异常升高位置点为止;
27、通过对全部异常升高位置点和标记异常升高位置点进行整合,确定异常升高位置点围成的区域,并将围城的区域命名为异常区域;
28、获取位于异常区域外沿的异常升高位置点和标记异常升高位置点,并将异常区域外沿内侧的异常升高位置点和标记异常升高位置点去除,再次分别计算异常区域外沿异常升高位置点和标记异常升高位置点周围的对接距离落入判定阈值内的点;
29、若异常区域外沿异常升高位置点和标记异常升高位置点周围的对接距离落入判定阈值内的点总数小于5时,将整个异常区域舍弃;
30、若异常区域外沿异常升高位置点和标记异常升高位置点周围的对接距离落入判定阈值内的点总数大于5时,对异常区域进行保留。
31、作为本发明所述远程控制的医疗陪护机器人的一种可选方案,其中:获取承重分析图,确定患者人员在第一承托片、第二承托片和第三承托片中位置,进而确定患者睡姿;
32、当患者或陪护人员需要对患者睡姿进行调节时,通过发出调节指令,语音控制模块对语音调节指令进行识别,语音识别模块将信号传递给控制模块,让控制模块对第一承托片、第二承托片和第三承托片中的驱动电机进行控制,带动第一承托片、第二承托片和第三承托片运动,实现对患者睡姿进行调节;
33、患者睡姿摆正后,通过再次发送语音调节指定,让控制模块对第一顶升机构和第二顶升机构进行控制,对患者俯仰角度进行控制;
34、当第一顶升机构对患者俯仰角度进行调控时,同时控制抽吸泵让限位机构从收纳机构中伸出,用于对患者俯仰角度调节时患者身体的定位。
35、作为本发明所述远程控制的医疗陪护机器人的一种可选方案,其中:。
36、与现有技术相比,本发明的有益效果是:
37、1、该一种远程控制的医疗陪护机器人,通过设置的智能感应模块,实现对患者的平躺位置进行分析和获取,通过智能获取患者在第一承托片、第二承托片和第三承托片上的位置,确定患者平躺是否出现偏斜,可以通过语音对第一承托片、第二承托片和第三承托片的运动进行控制,实现对患者平躺位置进行调节,便于后期对患者俯仰角度调节时,保持患者平稳,避免出现偏斜滑动的情况。
本文地址:https://www.jishuxx.com/zhuanli/20240911/291970.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表