一种人形机器人上肢装置的制作方法
- 国知局
- 2024-09-11 14:32:13
本发明涉及机器人设备,特别涉及一种人形机器人上肢装置。
背景技术:
1、人形机器人是一个极为复杂的系统工程,各类关节执行器与连接结构的零配件数量较多,在其组装与拆解维护过程中十分繁琐。现有人形机器人各部件的连接主要通过定制设计的连接板件和螺钉连接,一方面,拆装过程中需要借助专业相应地工具才可实现,拆装的便捷性不足;另一方面机器人的调试、运输及使用过程中存在复杂的振动工况,很容易导致螺钉连接松动甚至脱落,进而影响结构的可靠性;此外,螺钉的设计使用还需要考虑预留工具的操作空间,不利于结构的紧凑设计。
2、因此,如何提供一种可以快速组装和拆卸的机器人上肢,是本领域技术人员目前需要解决的技术问题。
技术实现思路
1、本发明目的是提供一种可以快速组装和拆卸的机器人上肢。
2、为实现上述目的,本发明提供了以下技术方案:
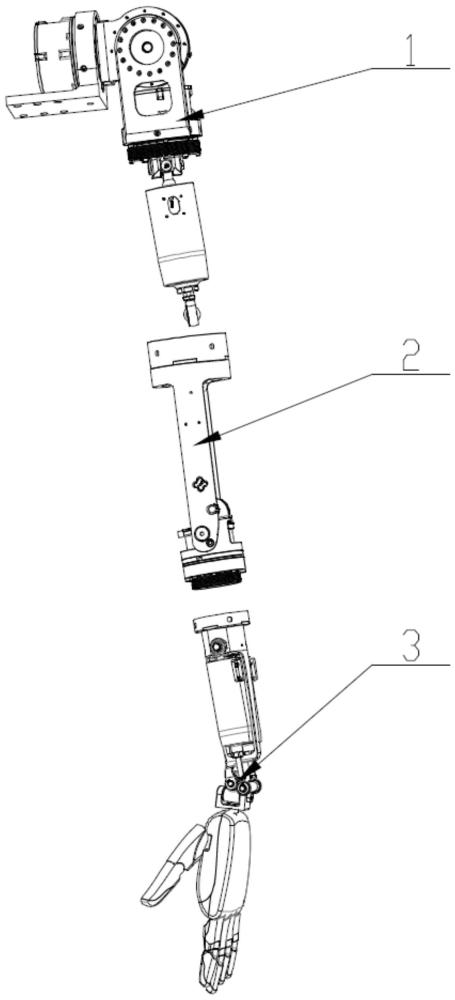
3、一种人形机器人上肢装置,包括:肩部、大臂和小臂,小臂通过大臂与肩部连接;
4、肩部包括旋转执行器组件和肩部线性执行器,线性执行器通过固定连接件安装至旋转执行器组件的活动端端部;
5、大臂包括第一连接组件和小臂旋转执行器组件,第一连接组件与固定连接件可拆卸地连接,小臂旋转执行器组件可转动地设置在第一连接组件背离固定连接件的一端;
6、小臂包括第二连接组件、腕关节线性执行器组件和仿人灵巧手,第二连接组件可拆卸地连接至小臂旋转执行器组件的活动端端部,仿人灵巧手与第二连接组件活动连接,腕关节线性执行器组件设置在第二连接组件和仿人灵巧手之间。
7、作为优选的,旋转执行器组件包括:
8、第一连接板,呈l型结构,第一连接板的一段面外侧与机器人连接;
9、第一旋转关节执行器,固定安装在第一连接板内侧的另一端面,第一旋转关节执行器的旋转输出端伸出第一连接板的端面;
10、第二连接板,呈l型结构,其一端面固定安装于第一旋转关节执行器的旋转输出端;
11、第二旋转关节执行器,固定安装在第二连接板内侧的另一端面,第二旋转关节执行器的旋转输出端伸出第二连接板的端面;
12、第三连接板,呈l型结构,其一端面固定安装于第二旋转关节执行器的旋转输出端;
13、第三旋转关节执行器,固定安装在第三连接板内侧的另一端面,第三旋转关节执行器的旋转输出端伸出第三连接板的端面。
14、作为优选的,固定连接件通过第一螺钉固定安装至第三旋转关节执行器的旋转输出端,固定连接件呈圆柱形结构,其外圆周上设置有第一外螺纹。
15、作为优选的,肩部线性执行器通过第一销轴连接至固定连接件背离第三旋转关节执行器的一侧。
16、作为优选的,第一连接组件包括:
17、大臂连接件,包括环形部和两块向下延伸的竖板,环形部内部用于穿插肩部线性执行器,小臂旋转执行器组件通过轴销螺钉安装至两竖板之间,且肩部线性执行器的活动端通过第二销轴与小臂旋转执行器组件的上端可转动地连接;
18、大臂锁紧环,为筒状结构,大臂锁紧环内侧壁设有与固定连接件的第一外螺纹相配合的第一内螺纹;
19、滑环压板,滑环压板通过第二螺钉与大臂连接件的环形部上端连接,滑环压板在安装状态时位于大臂锁紧环内部,且与大臂锁紧环内部的第一凸起卡接,以防止大臂锁紧环脱离大臂连接件。
20、作为优选的,小臂旋转执行器组件包括:
21、肘端连接件,内部设有空腔,肘端连接件顶部设置有与肩部线性执行器活动端连接的连接部,连接部相对于肩部线性执行器的轴线偏心设置;
22、小臂旋转关节执行器,安装于肘端连接件的空腔内,小臂旋转关节执行器的底端设置有第二外螺纹。
23、作为优选的,肘端连接件靠近竖板的两侧设置有弧形限位槽,竖板对应位置设置有用于和弧形限位槽配合的限位螺钉,以限制肘端连接件的旋转角度。
24、作为优选的,第二连接组件包括:
25、小臂结构件,小臂结构件的上端设置有止挡台阶,另一端通过第三销轴与仿人灵巧手的腕关节十字铰链结构转动连接;
26、小臂锁紧环,套设在小臂结构件外周,其内部设置有用于和第二外螺纹配合的第二内螺纹,小臂锁紧环内侧壁底部设置有用于和止挡台阶卡接的第二凸起,小臂锁紧环用于连接小臂结构件和大臂。
27、作为优选的,腕关节线性执行器组件包括:两个分别设置在小臂结构件两侧的腕关节线性执行器,腕关节线性执行器的通过第四销轴转动连接在小臂结构件的上端,腕关节线性执行器的活动端通过第五销轴与腕关节十字铰链结构转动连接。
28、作为优选的,腕关节十字铰链结构设置在仿人灵巧手的顶端,包括垂直设置的第一转轴和第二转轴,第一转轴垂直于第三销轴的轴线垂直,第二转轴与第三销轴平行,且腕关节线性执行器的活动端与第二转轴转动连接。
29、相对于上述背景技术,本发明所提供的一种人形机器人上肢装置,包括:肩部、大臂和小臂,小臂通过大臂与肩部连接;肩部包括旋转执行器组件和肩部线性执行器,线性执行器通过固定连接件安装至旋转执行器组件的活动端端部;大臂包括第一连接组件和小臂旋转执行器组件,第一连接组件与固定连接件可拆卸地连接,小臂旋转执行器组件可转动地设置在第一连接组件背离固定连接件的一端;小臂包括第二连接组件、腕关节线性执行器组件和仿人灵巧手,第二连接组件可拆卸地连接至小臂旋转执行器组件的活动端端部,仿人灵巧手与第二连接组件活动连接,腕关节线性执行器组件设置在第二连接组件和仿人灵巧手之间。
30、具体地,本发明所提供的实施例包括肩部、大臂、小臂,大臂通过第一连接组件可拆卸地的连接至肩部的固定连接件上,而小臂则通过第二连接组件可拆卸地连接至小臂旋转执行器组件的活动端端部,而仿人灵巧手可拆卸地与第二连接组件连接;其中,肩部中的旋转执行组件可以带动大臂和小臂在空间内自由活动,而肩部线性执行器可以实现小臂相对于大臂的摆动,小臂旋转执行器组件可以实现小臂相对于大臂的转动,腕关节线性执行器组件则可以是实现仿人灵巧手的不同方向的摆动;这样一来,通过将人形机器人上肢设计为肩部、大臂、小臂“3段式”模块化组件,并且各组件间可以通过连接组件快速连接,从而实现人形机器人上肢的模块化快速组装或者拆卸。
技术特征:1.一种人形机器人上肢装置,其特征在于,包括:肩部、大臂和小臂,所述小臂通过所述大臂与所述肩部连接;
2.根据权利要求1所述的人形机器人上肢装置,其特征在于,旋转执行器组件包括:
3.根据权利要求2所述的人形机器人上肢装置,其特征在于,所述固定连接件通过第一螺钉固定安装至所述第三旋转关节执行器的旋转输出端,所述固定连接件呈圆柱形结构,其外圆周上设置有第一外螺纹。
4.根据权利要求3所述的人形机器人上肢装置,其特征在于,所述肩部线性执行器通过第一销轴连接至所述固定连接件背离所述第三旋转关节执行器的一侧。
5.根据权利要求3所述的人形机器人上肢装置,其特征在于,所述第一连接组件包括:
6.根据权利要求5所述的人形机器人上肢装置,其特征在于,所述小臂旋转执行器组件包括:
7.根据权利要求6所述的人形机器人上肢装置,其特征在于,所述肘端连接件靠近所述竖板的两侧设置有弧形限位槽,所述竖板对应位置设置有用于和所述弧形限位槽配合的限位螺钉,以限制所述肘端连接件的旋转角度。
8.根据权利要求6所述的人形机器人上肢装置,其特征在于,所述第二连接组件包括:
9.根据权利要求8所述的人形机器人上肢装置,其特征在于,所述腕关节线性执行器组件包括:两个分别设置在所述小臂结构件两侧的腕关节线性执行器,所述腕关节线性执行器的通过第四销轴转动连接在所述小臂结构件的上端,所述腕关节线性执行器的活动端通过第五销轴与所述腕关节十字铰链结构转动连接。
10.根据权利要求9所述的人形机器人上肢装置,其特征在于,所述腕关节十字铰链结构设置在所述仿人灵巧手的顶端,包括垂直设置的第一转轴和第二转轴,所述第一转轴垂直于所述第三销轴的轴线垂直,所述第二转轴与所述第三销轴平行,且所述腕关节线性执行器的活动端与所述第二转轴转动连接。
技术总结本发明公开了一种人形机器人上肢装置,包括:肩部、大臂和小臂,小臂通过大臂与肩部连接;肩部包括旋转执行器组件和肩部线性执行器,线性执行器通过固定连接件安装至旋转执行器组件的活动端;大臂包括第一连接组件和小臂旋转执行器组件,第一连接组件与固定连接件连接,小臂旋转执行器组件设置在第一连接组件的一端;小臂包括第二连接组件、腕关节线性执行器组件和仿人灵巧手,第二连接组件连接至小臂旋转执行器组件的活动端,仿人灵巧手与第二连接组件连接,腕关节线性执行器组件设在第二连接组件和仿人灵巧手之间。如此设置,通过将人形机器人上肢设计为模块化组件,并且各组件间可以通过连接组件快速连接,从而实现模块化快速组装或者拆卸。技术研发人员:鄢鹏飞,王项彬,请求不公布姓名,请求不公布姓名,请求不公布姓名受保护的技术使用者:浙江禾川科技股份有限公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/291304.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。