移动体控制系统及其控制方法、存储介质、以及移动体与流程
- 国知局
- 2024-09-14 14:28:47
本发明涉及移动体控制系统及其控制方法、存储介质、以及移动体。
背景技术:
1、现有技术文献
2、近年,已知被称为超小型移动体(也称为微型移动体)的乘车定员为一人~两人左右的电动车辆、向人们提供各种服务的移动型机器人等小型的移动体。在像这样的移动体中,存在周期性地生成到目的地的行驶路径同时进行自主行驶的移动体。
3、专利文献1提出一种移动路径生成装置,其对给乘员带来的负担变少那样的舒适的移动路径进行设定。具体地,移动路径生成装置基于当前位置的车辆的行进方向以及目标位置的车辆的行进方向所成的角度、以及与车辆的转向角相应的行驶轨迹的曲率以及行驶距离,对每个行驶距离的曲率的变化程度为最缓慢的行驶轨迹进行设定。
4、专利文献
5、专利文献1:日本特开2018-2082号公报
技术实现思路
1、发明所要解决的问题
2、在微型移动体中存在例如具备前轮、以及随着前轮的驱动而动作的尾轮(从动轮)的三轮车辆。在这样的车辆中,在行驶开始时、到达判断时,依据车辆的姿态角的目标值而可能产生在该场合下的转弯。当产生该场合下的转弯时,尾轮的角度变大,给乘员的乘车舒适性带来不良影响。另外,小型微型移动体需要尽可能地抑制硬件资源的使用。因此,期望尽可能地减轻生成行驶路径时的处理量,并高效利用有限的硬件资源。
3、本发明是鉴于上述问题而完成的,在于以低计算成本而生成考虑到车辆的位置姿态的行驶路径。
4、用于解决问题的手段
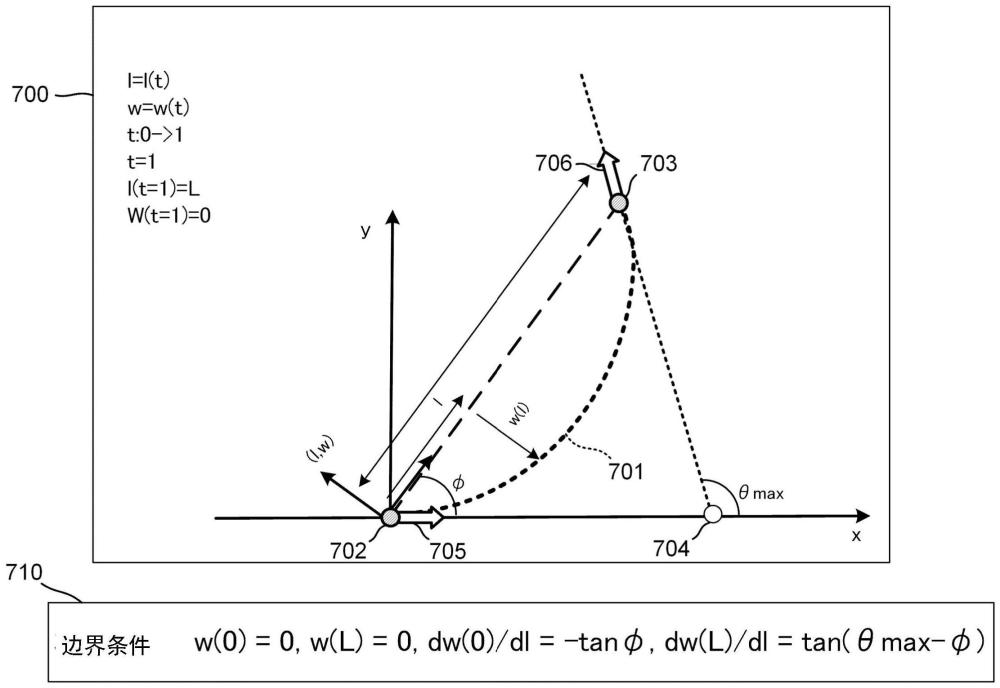
5、根据本发明,例如一种移动体控制系统,其特征在于,所述移动体控制系统具备:设定机构,其设定移动体的当前位置与目标位置;路径生成机构,其在将连结所述移动体的当前位置与目标位置的直线设为l轴并将与该l轴正交的直线设为w轴的lw坐标上,以满足预定的边界条件的方式生成从所述当前位置到所述目标位置的第一路径;以及转换机构,其将生成的所述第一路径转换为将所述移动体的行进方向设为x轴并将与该x轴正交的轴设为y轴的xy坐标。
6、另外,根据本发明,例如一种移动体控制系统的控制方法,其特征在于,
7、所述移动体控制系统的控制方法包含:
8、设定步骤,在该设定步骤中,设定移动体的当前位置与目标位置;
9、路径生成步骤,在该路径生成步骤中,在将连结所述移动体的当前位置与目标位置的直线设为l轴并将与该l轴正交的直线设为w轴的lw坐标上,以满足预定的边界条件的方式生成从所述当前位置到所述目标位置的第一路径;以及
10、转换步骤,在该转换步骤中,将生成的所述第一路径转换为将所述移动体的行进方向设为x轴并将与该x轴正交的轴设为y轴的xy坐标。
11、另外,根据本发明,存储用于例如使计算机作为如下机构发挥功能的程序:
12、设定机构,其设定移动体的当前位置与目标位置;
13、路径生成机构,其在将连结所述移动体的当前位置与目标位置的直线设为l轴并将与该l轴正交的直线设为w轴的lw坐标上,以满足预定的边界条件的方式生成从所述当前位置到所述目标位置的第一路径;以及
14、转换机构,其将生成的所述第一路径转换为将所述移动体的行进方向设为x轴并将与该x轴正交的轴设为y轴的xy坐标。
15、另外,根据本发明,例如一种移动体,其特征在于,
16、所述移动体具备:
17、设定机构,其设定移动体的当前位置与目标位置;
18、路径生成机构,其在将连结所述移动体的当前位置与目标位置的直线设为l轴并将与该l轴正交的直线设为w轴的lw坐标上,以满足预定的边界条件的方式生成从所述当前位置到所述目标位置的第一路径;以及
19、转换机构,其将生成的所述第一路径转换为将所述移动体的行进方向设为x轴并将与该x轴正交的轴设为y轴的xy坐标。
20、发明效果
21、根据本发明,能够以低计算成本而生成考虑到车辆的位置姿态的行驶路径。
技术特征:1.一种移动体控制系统,其特征在于,
2.根据权利要求1所述的移动体控制系统,其特征在于,
3.根据权利要求2所述的移动体控制系统,其特征在于,
4.根据权利要求3所述的移动体控制系统,其特征在于,
5.根据权利要求2所述的移动体控制系统,其特征在于,
6.根据权利要求5所述的移动体控制系统,其特征在于,
7.根据权利要求2所述的移动体控制系统,其特征在于,
8.一种移动体控制系统的控制方法,其特征在于,
9.一种存储介质,其特征在于,
10.一种移动体,其特征在于,
技术总结本发明提供移动体控制系统及其控制方法、存储介质、以及移动体,在于合适地生成考虑到车辆的位置姿态的行驶路径。本移动体控制系统设定移动体的当前位置与目标位置,在将连结移动体的当前位置与目标位置的直线设为l轴并将与该l轴正交的直线设为w轴的lw坐标上,以满足预定的边界条件的方式生成从当前位置到目标位置的第一路径,将生成的第一路径转换为将移动体的行进方向设为x轴并将与该x轴正交的轴设为y轴的xy坐标。技术研发人员:相泽航辉受保护的技术使用者:本田技研工业株式会社技术研发日:技术公布日:2024/9/12本文地址:https://www.jishuxx.com/zhuanli/20240914/294291.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表