自动焊接机器人移动定位装置的制作方法
- 国知局
- 2024-09-11 15:10:51
本发明涉及焊接移动定位,具体涉及自动焊接机器人移动定位装置。
背景技术:
1、目前,焊接与切割在金属加工中是最主要也是最重要的两块金属加工工艺,尤其是焊接,依然是金属连接的最主要工艺,但焊接的环境恶劣,强电弧光、粉尘、高温、露天等等都直接影响着焊工的健康,随着生活水平的提高,恶劣的焊接环境使当下年轻人已不在愿意从事焊接作业,也有很多焊接的场景已开始大量的采用机器人代替人工焊接,但全部都是在小范围空间位置对固定的工件进行固定的重复性焊接,只能对这种少种类、大批量的工件实现自动化的焊接作业,随着目前个性化、定制化的发展趋势,小批量、多种类的焊接工件越来越多,目前,重复焊接的自动化机器人完全满足不了小批量、多种类的焊接需求, 所以我们提出了自动焊接机器人移动定位装置。
技术实现思路
1、为解决上述技术问题,本发明提供自动焊接机器人移动定位装置,包括:
2、底板,以及设置在所述底板底部的支撑腿;
3、定位机构,该定位机构具有移动结构,用于驱动焊接机器人横向及纵向移动;
4、所述底板的底部与支撑腿的顶部固定连接,所述定位机构的底部与底板的顶部固定连接;
5、其中,所述定位机构包括:
6、第一导轨,该第一导轨具有限位结构,用于带动焊接机器人平稳移动;
7、固定座,该固定座顶部设置有固定机构,以及设置在所述固定座底部的第二导轨;
8、所述第一导轨固定连接在底板的顶部,所述第二导轨的底部与第一导轨的顶部滑动连接,所述固定座的底部与第二导轨远离第一导轨的一侧滑动连接,所述固定机构固定安装在固定座远离第二导轨的一侧,将焊接机器人通过固定机构固定,驱动第二导轨在第一导轨顶部滑动,从而带动固定座移动,最终带动与固定机构固定的焊接机器人移动,驱动固定座在第二导轨顶部移动,从而带动与固定机构固定的焊接机器人移动,使得焊接机器人能够沿着两个相互垂直的方向移动,使得焊接机器人能够对不同位置的工件进行焊接,到达不同焊接位置,从而达到对焊接位置的定位。
9、进一步地,所述第一导轨在底板的顶部对称设置,两个所述第一导轨的间隔处设置有第一伸缩杆,所述第一伸缩杆的表面固定连接有安装座,所述安装座远离第一伸缩杆的一侧与底板远离支撑腿的一侧固定连接,所述第一伸缩杆远离安装座的一端与第二导轨靠近安装座的一侧固定连接,启动第一伸缩杆,带动第二导轨在第一导轨的顶部滑动,从而带动固定座移动,最终带动与固定机构固定的焊接机器人移动。
10、进一步地,所述第一伸缩杆的两侧对称设置有第一固定板,所述第一固定板固定连接在底板的顶部,所述第一固定板设置有两组,每组所述第一固定板在第二导轨的两侧对称设置,两个所述第一固定板的间隔处对称设置有滑杆,所述滑杆的表面与两个第一固定板的内侧面固定连接,所述滑杆贯穿设置在第二导轨的内部,且所述滑杆的表面与第二导轨的内壁滑动连接,第二导轨在滑杆表面滑动,从而起到限位效果,避免焊接机器人在移动时产生晃动,且设置两个滑杆,能够达到更佳的限位效果。
11、进一步地,所述第二导轨靠近第一伸缩杆的一侧设置有第一弹簧,所述第一弹簧固定连接在第二导轨靠近第一伸缩杆的一侧,所述第一弹簧远离第一伸缩杆的一端与第一固定板靠近第二导轨的一侧固定连接,且所述第一弹簧套设在两个滑杆外部,第二导轨移动,带动第一弹簧压缩,从而起到缓冲效果,避免第二导轨骤然加速,从而避免产生晃动,且第一弹簧能够在第二导轨产生震动时,起到减震效果,进一步避免震动的产生,确保焊接时的稳定,避免焊接位置产生偏移,确保焊接位置的准确。
12、进一步地,所述第一导轨的内部开设有第一限位槽,所述第一限位槽的内壁滑动连接有第一限位块,所述第一限位块远离第一导轨的一侧与第二导轨的底部固定连接,第二导轨移动,带动第一限位块在第一限位槽内部滑动,能够避免第二导轨在第一导轨顶部滑动时,能够避免第二导轨与第一导轨之间产生缝隙,避免晃动的产生,进一步确保移动时的稳定,避免焊接位置偏移。
13、进一步地,所述第二导轨的内部开设有第二限位槽,所述第二限位槽的内部滑动连接有第二限位块,所述第二限位块远离第二导轨的一侧与固定座靠近第二导轨的一侧固定连接,驱动第二限位块移动,带动固定座移动,同时第二限位块在第二限位槽内部滑动,同理,能够避免固定座在第二导轨顶部滑动时产生缝隙,避免产生晃动,确保移动时的稳定,进一步避免焊接位置偏移。
14、进一步地,所述第二限位块的表面固定连接有第二伸缩杆,所述第二伸缩杆远离第二限位块的一端与第二限位槽的内壁固定连接,且所述第二伸缩杆设置在第二限位槽的内部,启动第二伸缩杆,第二伸缩杆带动第二限位块移动,带动固定座移动,从而带动与固定机构固定焊接机器人移动。
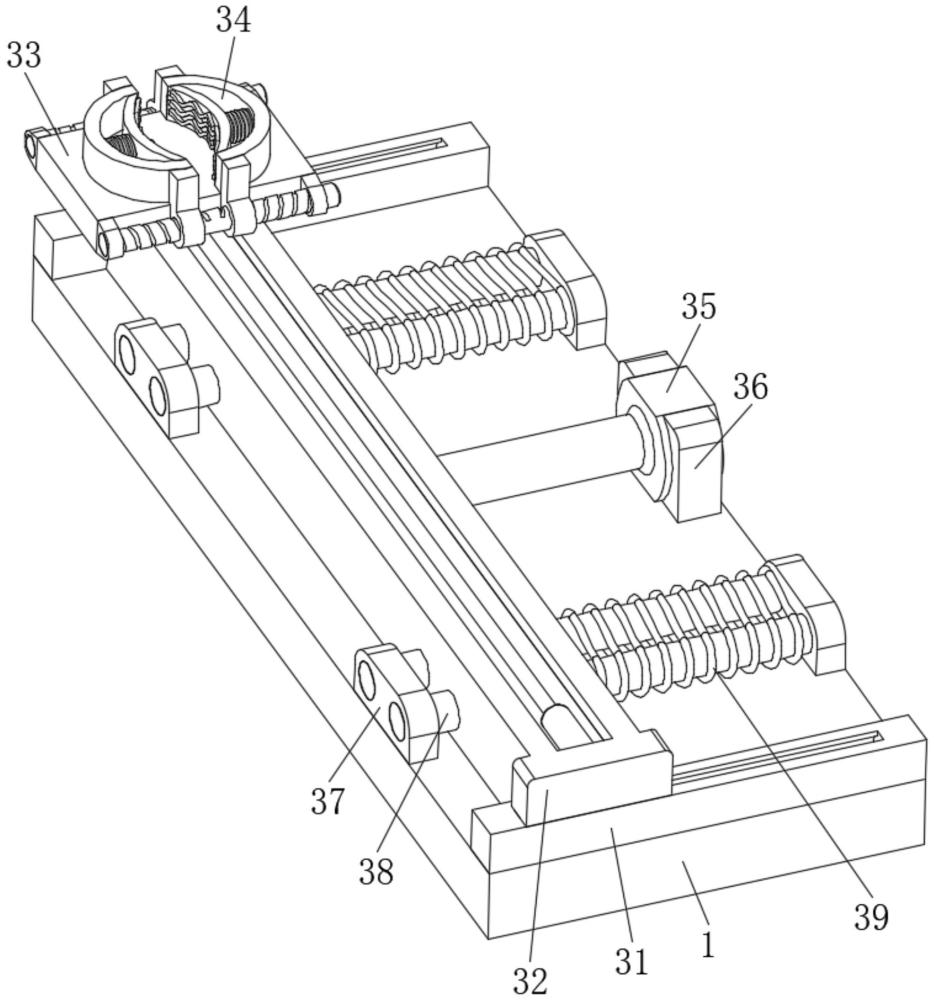
15、进一步地,所述固定机构包括第二固定板,所述第二固定板在固定座远离第二导轨的一侧对称设置,且两个所述第二固定板均滑动连接在固定座远离第二导轨的一侧,所述第二固定板的两侧均固定连接有螺纹座,所述螺纹座的内部螺纹设置有螺纹杆,所述螺纹杆的表面对称开设有螺纹,所述螺纹杆两端的螺纹方向相反,且所述螺纹杆分别与同侧的两螺纹座的内壁螺纹连接,所述螺纹杆的两侧对称设置有安装板,所述安装板的内侧面与螺纹杆的表面转动连接,驱动螺纹杆转动,带动螺纹座移动,带动第二固定板移动,由于螺纹杆表面设置有两个反向的螺纹,且两个螺纹座分别通过两个反向的螺纹杆螺纹连接,螺纹杆转动时,能够带动两个第二固定板相互远离或接近,达到夹紧目的,且螺纹连接,能够带动两个第二固定板均匀且匀速接近,达到稳定夹持的目的。
16、进一步地,两个所述第二固定板相互靠近的一侧均固定连接有弹板,所述弹板远离第二固定板的一侧固定连接有胶板,且所述胶板设置为波状,第二固定板移动,带动弹板移动,固定时,胶板首先与焊接机器人的底座接触,随后弹板产生变形,随后逐渐达到夹紧目的,通过设置弹板,能够适应焊接机器人的不同形状,对各种焊接机器人进行固定,从而驱动焊接机器人进行移动,达到对焊接位置的定位,且胶板的设置,能够增加与焊接机器人底座的摩擦力,达到更好的固定效果,且波形的胶板,能够进一步增强摩擦力,橡胶材质的胶板也能对焊接机器人的底座起到保护作用,避免夹持时焊接机器人产生震动造成底座磨损。
17、进一步地,所述第二固定板与弹板的间隔处设置有第一伸缩管,所述第一伸缩管的内部设置有第二伸缩管,所述第一伸缩管及第二伸缩管的两端分别与第二固定板、弹板相互靠近的一侧固定连接,所述第一伸缩管与第二伸缩管的间隔处设置有第二弹簧,所述第二弹簧的两端分别与第一伸缩管与第二伸缩管相互靠近的一侧固定连接,所述第二伸缩管的内部设置有第三弹簧,所述第三弹簧的两端分别与第一伸缩管与第二伸缩管相互靠近的一侧固定连接,弹板变形,带动第一伸缩管与第二伸缩管变形,同时带动第二弹簧与第三弹簧收缩,从而为弹板的形变产生减速,避免弹板骤然变形产生断裂,且能够辅助弹板产生形变,降低弹板的负荷,且第二弹簧与第三弹簧恢复形变的弹力,能够提高夹紧效果,避免焊接机器人在移动时产生晃动,第二伸缩管的设置,能够隔绝第二弹簧与第三弹簧,避免二者在形变伸缩时产生接触,避免二者纠缠,从而确保形变相互独立,避免第二弹簧与第三弹簧相互影响。
18、本发明具有的有益效果:
19、1、本发明通过设置定位机构,驱动第二导轨在第一导轨顶部滑动,从而带动固定座移动,最终带动与固定机构固定的焊接机器人移动,驱动固定座在第二导轨顶部移动,从而带动与固定机构固定的焊接机器人移动,使得焊接机器人能够沿着两个相互垂直的方向移动,使得焊接机器人能够对不同位置的工件进行焊接,到达不同焊接位置,从而达到对焊接位置的定位。
20、2、本发明通过设置限位块,第一限位块在第一限位槽内部滑动,能够避免第二导轨在第一导轨顶部滑动时,能够避免第二导轨与第一导轨之间产生缝隙,避免晃动的产生,进一步确保移动时的稳定,避免焊接位置偏移,第二限位块在第二限位槽内部滑动,同理,能够避免固定座在第二导轨顶部滑动时产生缝隙,避免产生晃动,确保移动时的稳定,进一步避免焊接位置偏移。
21、3、本发明通过设置固定机构,由于螺纹杆表面设置有两个反向的螺纹,且两个螺纹座分别通过两个反向的螺纹杆螺纹连接,螺纹杆转动时,能够带动两个第二固定板相互远离或接近,达到夹紧目的,且螺纹连接,能够带动两个第二固定板均匀且匀速接近,达到稳定夹持的目的,通过设置弹板345,能够适应焊接机器人的不同形状,对各种焊接机器人进行固定,从而驱动焊接机器人进行移动,达到对焊接位置的定位,胶板的设置,能够增加与焊接机器人底座的摩擦力,达到更好的固定效果,且波形的胶板,能够进一步增强摩擦力,橡胶材质的胶板也能对焊接机器人的底座起到保护作用,避免夹持时焊接机器人产生震动造成底座磨损。
22、4、本发明通过设置第一伸缩管,第一伸缩管与第二伸缩管变形,同时带动第二弹簧与第三弹簧收缩,从而为弹板的形变产生减速,避免弹板骤然变形产生断裂,且能够辅助弹板产生形变,降低弹板的负荷,且第二弹簧与第三弹簧恢复形变的弹力,能够提高夹紧效果,避免焊接机器人在移动时产生晃动,第二伸缩管的设置,能够隔绝第二弹簧与第三弹簧,避免二者在形变伸缩时产生接触,避免二者纠缠,从而确保形变相互独立,避免第二弹簧与第三弹簧相互影响。
本文地址:https://www.jishuxx.com/zhuanli/20240911/293461.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表