一种适时四驱车辆的辅驱动力通断控制方法与流程
- 国知局
- 2024-09-14 14:37:27
本发明属于双电机四驱车辆辅驱控制,具体涉及一种适时四驱车辆的辅驱动力通断控制方法。
背景技术:
1、双电机四驱车辆具有效率高、续航长、性能好以及能够应付复杂工况的优点,当前双电机纯电四驱车辆的辅驱主要有三种类型:同步电驱、带脱开机构的同步电驱、异步电驱。在单电机工作的情况下,异步电驱和带脱开机构的同步电驱不会产生拖曳力矩,而以同步电驱作为辅驱则会产生反电动势,从而产生拖曳力矩。且现有的适时四驱控制策略要么通过手动按键进入,要么仅仅通过abs传感器计算轮胎的滑移率判断打滑工况来主动介入,打滑工况的识别条件不够严谨,也没有考虑到其他需要四驱行驶的工况条件。
技术实现思路
1、为了克服上述问题,本发明提供一种适时四驱车辆的辅驱动力通断控制方法,能够有效识别各种工况,并在两驱模式的工况下断开辅驱的动力传输,防止产生拖曳扭矩,从而提升车辆的动力性,提高车辆的续航能力,更可靠的控制辅驱动力传输的通断,减少轴向空间的占用。
2、一种适时四驱车辆的辅驱动力通断控制方法,包括如下内容:
3、步骤一,进行各个工况判断
4、步骤1.1,整体轮速信息判断
5、根据四个车轮的轮速信号,判断四个轮速是否有效,其中至少三个车轮轮速有效,且当存在一个轮速无效时,另外三个轮速两两之间的差值均不小于打滑阈值,就认为整体轮速信息有效;
6、步骤1.2,车速判断
7、当四个轮速全部正常时,采用四个轮速平均值作为车速;当其中一个车轮的轮速异常时,取剩下三个轮速平均值作为车速;当其中两个车轮的轮速异常且该两个车轮呈对角关系时,取另外两个呈对角关系车轮的轮速平均值作为车速;当其中两个车轮的轮速异常且该两个车轮不呈对角关系时,通过电机输出轴的转速计算车速;若车速超过道路的限定车速时说明车辆超速行驶;
8、步骤1.3,轮速加速度判断
9、轮速加速度计算公式如下所示:
10、
11、其中vij是这一时刻的车轮平均轮速,vij+1是下一时刻的车轮平均轮速,δtmin是所取的时间间隔,aij是轮速加速度;
12、其中当|aij|<a1,δtmin取δt1;当a1<|aij|<a2,δtmin取δt2;当a2<|aij|,δtmin取δt3;δt1>δt2>δt3;a1和a2分别为不同的轮速加速度值;
13、步骤1.4,轮速加速度梯度判断
14、轮速加速度梯度计算公式如下所示:
15、
16、其中aij为这一时刻的轮速加速度,aij+1为下一时刻的轮速加速度,δt为所取的时间间隔;
17、步骤1.5,车辆转弯工况判断:车身控制器通过转向速度传感器检测到车辆在转弯;
18、步骤1.6,刹车失灵判断:刹车系统故障灯亮;
19、步骤1.7,爆胎判断:胎压报警灯亮;
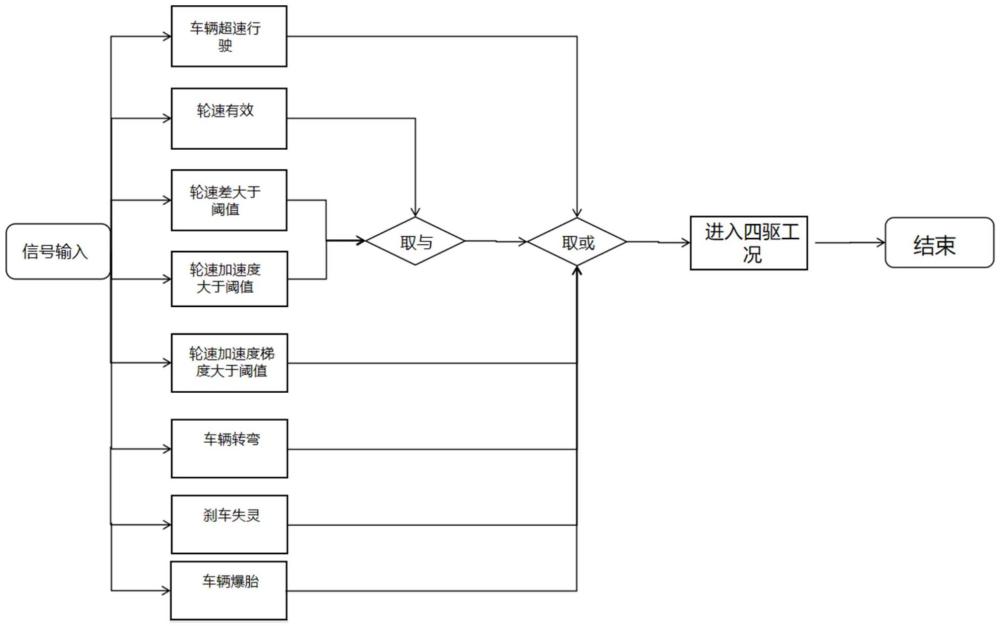
20、步骤二,若以下六种情况存在任意一种或同时存在多种,则车辆切换为四驱模式行驶;其中六种情况如下:
21、1.车辆超速行驶;
22、2.轮速加速度梯度大于阈值;
23、3.车轮处于转弯工况;
24、4.刹车失灵;
25、5.车轮爆胎;
26、6.车辆处于打滑工况,即轮速信息判断为有效状态,同时轮速差大于阈值,且轮速加速度大于阈值。
27、所述步骤1.1,四个车轮的轮速信号通过tcu/mcu传输至vcu,由vcu判断轮速是否有效。
28、所述步骤1.1,当其中一个轮速无效时,若另外三个轮速存在其中一个轮速值过大或者过小,而其他两个轮速值相等,则此时轮速信息记为有效。
29、所述步骤1.2中,电机输出轴的转速乘以主减速器的速比,再乘以车轮周长就得到车速。
30、所述步骤1.3中轮速加速度的阈值根据整车动力性进行标定。
31、所述步骤1.4中轮速加速度梯度的阈值根据整车动力性进行标定。
32、所述步骤1.1中若一个轮速无效,另外三个轮速存在其中一个轮速值过大或者过小,而其他两个轮速值相等,则如轮速相等的两个车轮为后轮,则前轮存在打滑风险,如轮速相等的两个车轮为左侧车轮,则右侧车轮存在打滑风险。
33、本发明的有益效果:
34、本发明控制车辆在普通路况下采用两驱行驶策略,只有在驱动轮打滑(道路不良)、车辆主动转弯和车辆失控时切换为四驱模式行驶,保证车辆的动力性和安全性。
技术特征:1.一种适时四驱车辆的辅驱动力通断控制方法,其特征在于,包括如下内容:
2.根据权利要求1所述的一种适时四驱车辆的辅驱动力通断控制方法,其特征在于,所述步骤1.1,四个车轮的轮速信号通过tcu/mcu传输至vcu,由vcu判断轮速是否有效。
3.根据权利要求1所述的一种适时四驱车辆的辅驱动力通断控制方法,其特征在于,所述步骤1.1,当其中一个轮速无效时,若另外三个轮速存在其中一个轮速值过大或者过小,而其他两个轮速值相等,则此时轮速信息记为有效。
4.根据权利要求1所述的一种适时四驱车辆的辅驱动力通断控制方法,其特征在于,所述步骤1.2中,电机输出轴的转速乘以主减速器的速比,再乘以车轮周长就得到车速。
5.根据权利要求1所述的一种适时四驱车辆的辅驱动力通断控制方法,其特征在于,所述步骤1.3中轮速加速度的阈值根据整车动力性进行标定。
6.根据权利要求1所述的一种适时四驱车辆的辅驱动力通断控制方法,其特征在于,所述步骤1.4中轮速加速度梯度的阈值根据整车动力性进行标定。
7.根据权利要求1所述的一种适时四驱车辆的辅驱动力通断控制方法,其特征在于,所述步骤1.1中若一个轮速无效,另外三个轮速存在其中一个轮速值过大或者过小,而其他两个轮速值相等,则如轮速相等的两个车轮为后轮,则前轮存在打滑风险,如轮速相等的两个车轮为左侧车轮,则右侧车轮存在打滑风险。
8.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-7中任一所述的一种适时四驱车辆的辅驱动力通断控制方法。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-5中任一所述的一种适时四驱车辆的辅驱动力通断控制方法。
技术总结本发明属于双电机四驱车辆辅驱控制技术领域,具体涉及一种适时四驱车辆的辅驱动力通断控制方法;若以下情况存在任意一种或同时存在多种,则车辆切换为四驱模式行驶;其中六种情况为车辆超速行驶;轮速加速度梯度大于阈值;车轮处于转弯工况;刹车失灵;车轮爆胎;车辆处于打滑工况,即轮速信息判断为有效状态,同时轮速差大于阈值,且轮速加速度大于阈值;本发明能够有效识别各种工况,并在两驱模式的工况下断开辅驱的动力传输,防止产生拖曳扭矩,从而提升车辆的动力性,提高车辆的续航能力,更可靠的控制辅驱动力传输的通断,减少轴向空间的占用。技术研发人员:肖子杰,张鹏飞,徐明,刘国亮,马程翔,葛林杉,陈震杰,刘浩,王枭鹏受保护的技术使用者:一汽奔腾汽车股份有限公司技术研发日:技术公布日:2024/9/12本文地址:https://www.jishuxx.com/zhuanli/20240914/295121.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表