一种齿轨车的制动方法、装置、设备及存储介质与流程
- 国知局
- 2024-09-14 14:39:28
本申请涉及轨道交通,尤其涉及一种齿轨车的制动方法、装置、设备及存储介质。
背景技术:
1、齿轨车,或称齿轨列车,是一种特殊的轨道交通车辆,主要应用于山区或旅游景区的观光线路,或者矿井中煤炭及矿石的运输。
2、目前齿轨车行驶路线的坡度比较平缓,使得现有的制动方法只适用于比较平缓的路线。但是在一些特殊的环境下,齿轨车也需要在坡度较大的坡道上运行。当齿轨车在坡度较大的坡道上运行时,由于重力作用,现有的制动方法将无法满足齿轨车在坡道上平稳制动的要求,甚至可能发生溜车风险,造成更大的安全事故。
技术实现思路
1、有鉴于此,本申请的目的在于提供了一种齿轨车的制动方法、装置、设备及存储介质,确保齿轨车在地面坡度较大的线路上可以进行平稳制动,保证齿轨车可以平稳停车,避免造成安全事故,其具体技术方案如下:
2、第一方面,本申请提供了一种齿轨车的制动方法,所述方法包括:
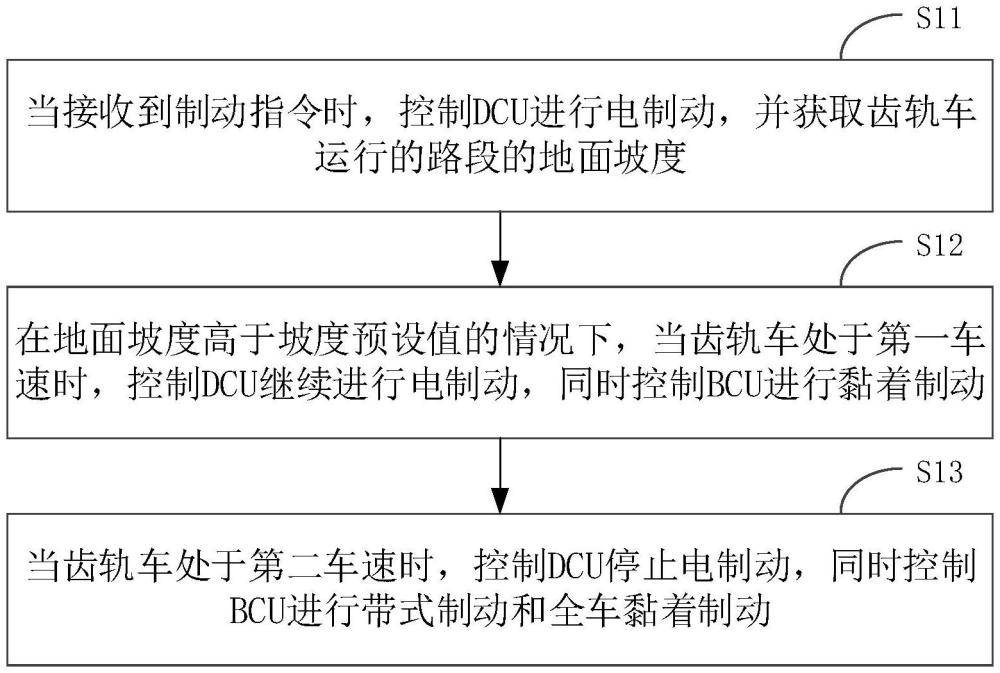
3、当接收到制动指令时,控制牵引控制单元dcu进行电制动,并获取所述齿轨车运行的路段的地面坡度;
4、在所述地面坡度高于坡度预设值的情况下,当所述齿轨车处于第一车速时,控制所述dcu继续进行电制动,同时控制制动控制单元bcu进行黏着制动;
5、当所述齿轨车处于第二车速时,控制所述dcu停止电制动,同时控制所述bcu进行带式制动和全车黏着制动,所述第一车速大于所述第二车速。
6、在一种可能的实现方式中,在所述获取所述齿轨车运行的路段的地面坡度之后,所述方法还包括:
7、在所述地面坡度不高于所述坡度预设值的情况下,当所述齿轨车处于第三车速时,控制所述dcu继续进行电制动,同时控制制动控制单元bcu进行黏着制动,所述第一车速大于所述第三车速;
8、当所述齿轨车处于第四车速时,控制所述dcu停止电制动,同时控制所述bcu进行带式制动和全车黏着制动,所述第二车速大于所述第四车速,所述第三车速大于所述第四车速。
9、在一种可能的实现方式中,所述控制牵引控制单元dcu进行电制动,包括:
10、根据所述制动指令计算所述齿轨车的各节车的电制动力需求值;
11、控制各节车的dcu根据各节车对应的所述电制动力需求值进行电制动。
12、在一种可能的实现方式中,所述方法还包括:
13、当所述齿轨车处于所述第一车速时,控制所述dcu发出电制动退出信号;
14、所述控制所述dcu继续进行电制动,包括:
15、在控制所述dcu发出电制动退出信号后经过预设时长,控制所述dcu在继续进行电制动时减小电制动力。
16、在一种可能的实现方式中,所述获取齿轨车运行的路段的地面坡度,包括:
17、接收来自整车的地面坡度信号;
18、分析所述地面坡度信号得到所述地面坡度。
19、第二方面,本申请还提供了一种齿轨车的制动装置,所述装置包括:
20、电制动控制模块,用于当接收到制动指令时,控制牵引控制单元dcu进行电制动,并获取所述齿轨车运行的路段的地面坡度;
21、混合控制模块,用于在所述地面坡度高于坡度预设值的情况下,当所述齿轨车处于第一车速时,控制所述dcu继续进行电制动,同时控制制动控制单元bcu进行黏着制动;
22、保持制动控制模块,用于当所述齿轨车处于第二车速时,控制所述dcu停止电制动,同时控制所述bcu进行带式制动和全车黏着制动,所述第一车速大于所述第二车速。
23、在一种可能的实现方式中,所述混合制动模块,还用于在所述地面坡度不高于所述坡度预设值的情况下,当所述齿轨车处于第三车速时,控制所述dcu继续进行电制动,同时控制制动控制单元bcu进行黏着制动,所述第一车速大于所述第三车速;
24、所述保持制动控制模块,还用于当所述齿轨车处于第四车速时,控制所述dcu停止电制动,同时控制所述bcu进行带式制动和全车黏着制动,所述第二车速大于所述第四车速,所述第三车速大于所述第四车速。
25、在一种可能的实现方式中,所述混合控制模块,还用于当所述齿轨车处于所述第一车速时,控制所述dcu发出电制动退出信号;
26、所述混合控制模块在控制所述dcu继续进行电制动时,具体用于:
27、在控制所述dcu发出电制动退出信号后经过预设时长,控制所述dcu在继续进行电制动时减小电制动力。
28、第三方面,本申请还提供了一种计算机设备,包括:存储器以及处理器;
29、其中,所述存储器用于存储计算机程序;
30、所述处理器用于执行所述存储器中的计算机程序,以实现上述第一方面或第一方面任一项所述的方法。
31、第四方面,本申请还提供了一种计算机可读存储介质,存储有指令,当其在计算机上运行时,使得计算机执行上述第一方面或第一方面任一项所述的方法。
32、在本申请实施例中,当接收到制动指令时,控制牵引控制单元dcu进行电制动,并获取齿轨车运行的路段的地面坡度;在地面坡度高于坡度预设值的情况下,当齿轨车处于第一车速时,控制dcu继续进行电制动,同时控制制动控制单元bcu进行黏着制动;当齿轨车处于第二车速时,控制dcu停止电制动,同时控制bcu进行带式制动和全车黏着制动,第一车速大于第二车速。本申请实施例采用电制动、黏着制动和带式制动结合的方式完成制动,确保齿轨车在地面坡度高于坡度预设值的线路上可进行平稳制动,保证齿轨车可以平稳停车;充分利用电制动,在制动过程中向线路反馈电能,降低列车能耗。
技术特征:1.一种齿轨车的制动方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,在所述获取所述齿轨车运行的路段的地面坡度之后,所述方法还包括:
3.根据权利要求1或2所述的方法,其特征在于,所述控制牵引控制单元dcu进行电制动,包括:
4.根据权利要求1或2所述的方法,其特征在于,所述方法还包括:
5.根据权利要求1或2所述的方法,其特征在于,所述获取齿轨车运行的路段的地面坡度,包括:
6.一种齿轨车的制动装置,其特征在于,所述装置包括:
7.根据权利要求6所述的装置,其特征在于,
8.根据权利要求6或7所述的装置,其特征在于,
9.一种计算机设备,其特征在于,包括:存储器以及处理器;
10.一种计算机可读存储介质,其特征在于,存储有指令,当其在计算机上运行时,使得计算机执行如权利要求1至5任一项所述的方法。
技术总结本申请实施例提供了一种齿轨车的制动方法、装置、设备及存储介质,该方法包括:当接收到制动指令时,控制牵引控制单元DCU进行电制动,并获取齿轨车运行的路段的地面坡度;在地面坡度高于坡度预设值的情况下,当齿轨车处于第一车速时,控制DCU继续进行电制动,同时控制制动控制单元BCU进行黏着制动;当齿轨车处于第二车速时,控制DCU停止电制动,同时控制BCU进行带式制动和全车黏着制动,第一车速大于第二车速。本申请实施例采用电制动、黏着制动和带式制动结合的方式完成制动,确保齿轨车在地面坡度高于坡度预设值的线路上可进行平稳制动,保证齿轨车可以平稳停车;充分利用电制动,在制动过程中向线路反馈电能,降低列车能耗。技术研发人员:尚江傲,赵小军,杨裕钦,谢朝辉,王丽,郭金库受保护的技术使用者:中车株洲电力机车有限公司技术研发日:技术公布日:2024/9/12本文地址:https://www.jishuxx.com/zhuanli/20240914/295341.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。