一种自动驾驶仿真测试方法、系统及设备与流程
- 国知局
- 2024-09-14 14:56:45
本发明涉及自动驾驶,具体涉及一种自动驾驶仿真测试方法、系统及设备。
背景技术:
1、近年来,自动驾驶技术已广泛应用于各类车辆,因此相关功能的成熟度也成为用户关注的重点,而这一需求主要依赖于对自动驾驶车辆的行车安全进行广泛、大量的测试与验证。
2、现阶段针对自动驾驶车辆的测试方法分为仿真测试和实车测试,这两者所使用的测试场景均来源于法规所设计的标准化场景,与实际行车场景有一定的区别。目前,为满足真实、高效、安全的自动驾驶测试需求,提出了虚实结合的测试方法,该方法采用了基于实车数据所复现的虚拟场景进行自动驾驶仿真测试的技术方案,能够在极大丰富场景库的同时提升测试效率与安全系数。
3、现阶段,场景复现的数据多来源于车端与路端传感器或完全依赖于车端传感器。一方面,这种数据采样方式致使设备成本大幅增加的同时无法保障复现的准确性,而另一方面也使得参与场景的交通参与者数量过多,非关键要素增加,致使计算成本陡增,并不利于自动驾驶仿真测试。
4、而在低成本场景复现方法中,往往采用以法规场景为测试用例,人工搭建实际场景后再虚拟化的复现手段。这种方法虽在一定程度上解决了交通参与者运动数据过于理想化的问题,但也只是碎片式复现场景,进而通过自动驾驶仿真测试来获得非连续场景下车辆行驶所需的条件,未考虑场景截断问题,如半路停车场景;停车场景会导致车辆位姿传感器,输出位姿点的不规律,导致自动驾驶时出现车辆在停车点频繁切换航向角或停车位置,该过程中的人员、财产安全系数较低。
技术实现思路
1、本申请提供一种自动驾驶仿真测试方法、系统及设备,能够应对场景截断问题,提高人员、财产安全系数。
2、本申请的第一方面提供了一种自动驾驶仿真测试方法;
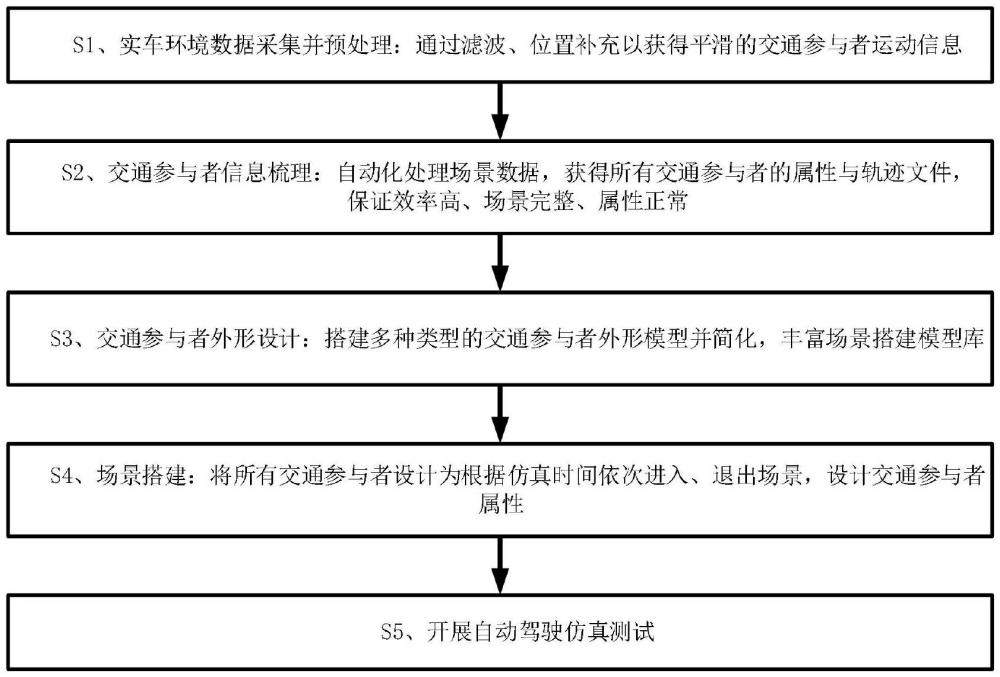
3、一种自动驾驶仿真测试方法,包括以下步骤:
4、获取交通参与者信息,其中,交通参与者信息包括交通参与者的轨迹点;
5、删除交通参与者的轨迹点中的自车停车轨迹点;
6、根据连续行驶补点算法,补充规律的新轨迹点代替自车停车轨迹点,得到新交通参与者信息;
7、根据新交通参与者信息,进行自动驾驶仿真测试。
8、上述方案,通过删除自车停车轨迹点补充补充规律的新轨迹点,解决了停车会造成输出位姿点的不规律问题,纠正了自动驾驶路径,使得频繁切换航向角或停车位置地情况不易发生,提高了自动驾驶过程中的人员、财产安全系数。
9、优选的,所述连续行驶补点算法为:
10、
11、其中,交通参与者信息包括分别代表自车停车前的取样时间与自车启动后的取样时间,tc代表新轨迹点的时刻,xa、ya、yawa、va分别代表ta时自车的x轴坐标位置、y轴坐标位置、航向角和速度,xb、yb、yawb、vb分别代表tb时自车的x轴坐标位置、y轴坐标位置、航向角和速度,xc、yc、yawc、vc分别代表tc时自车的x轴坐标位置、y轴坐标位置、航向角和速度,vxa、vya分别代表ta时自车在水平面上x轴、y轴的两个分速度。
12、优选的,在删除交通参与者的轨迹点中的自车停车轨迹点前,包括:
13、对交通参与者信息中的自车运动轨迹点进行滤波处理。
14、优选的,在得到新交通参与者信息后,包括:
15、识别新交通参与者信息中的静态交通参与者信息、动态交通参与者信息;
16、根据动态化算法,对静态交通参与者信息进行动态化处理,得到静态交通参与者轨迹;
17、对动态交通参与者信息中的动态交通参与者轨迹点进行插值处理,使得动态交通参与者轨迹;
18、根据静态交通参与者轨迹以及动态交通参与者轨迹,得到交通参与者轨迹文件以作为自动驾驶仿真测试。
19、优选的,所述动态化算法为:
20、
21、其中,静态交通参与者信息包括xd、yd、yawd、vd、xe、ye、yawe、ve,xd、yd、yawd、vd代表静态交通参与者进入被采集范围时的x轴坐标位置、y轴坐标位置、航向角和速度,xe、ye、yawe、ve代表静态交通参与者离开被采集范围时的x轴坐标位置、y轴坐标位置、航向角和速度,vxd、vyd代表静态交通参与者在进入场景时的速度分量,δt1为采样步长。
22、优选的,新交通参与者信息包括交通参与者外廓信息,交通参与者外廓信息包括若干属性对象,根据新交通参与者信息,进行自动驾驶仿真测试前,包括:
23、删除交通参与者外廓信息中特定的属性对象,并按照预置的修改规则对属性对象的内容进行修改。
24、优选的,根据新交通参与者信息,进行自动驾驶仿真测试,包括:
25、根据新交通参与者信息建立时间戳参考交通参与者列表;
26、将时间戳参考交通参与者列表、预设定的系统仿真时间、预设定的场景模型输入至预置的仿真测试系统得到自动驾驶仿真场景,自动驾驶仿真场景中具有若干交通参与者,将自动驾驶仿真场景中的交通参与者坐标转换为世界坐标进行自动驾驶仿真测试。
27、优选的,将时间戳参考交通参与者列表、系统仿真时间、预设定的场景模型输入至预置的仿真测试系统得到自动驾驶仿真场景后,包括:
28、对自动驾驶仿真场景中预设的驾驶关注区域外的交通参与者进行过滤。
29、在本申请的第二方面提供了一种自动驾驶仿真测试系统。
30、一种自动驾驶仿真测试系统,包括:
31、交通参与者信息获取模块,用于获取交通参与者信息,其中,交通参与者信息包括交通参与者的轨迹点;
32、自车停车轨迹点删除模块,用于删除交通参与者的轨迹点中的自车停车轨迹点;
33、补点模块,用于根据连续行驶补点算法,补充规律的新轨迹点代替自车停车轨迹点,得到新交通参与者信息;
34、在本申请的第三方面提供了电子设备。
35、电子设备,包括处理器、存储器和收发器,所述存储器用于存储指令,所述收发器用于和其他设备通信,所述处理器用于执行所述存储器中存储的指令,以使所述电子设备执行一种自动驾驶仿真测试方法。
36、综上所述,本申请包括以下有益技术效果:
37、1、本申请可复现真实的、连续的、复杂的测试场景,可自动化、快速处理场景数据,提升场景复现效率,能够很好地应对场景截断问题,提高人员、财产安全系数;
38、2、本申请可在仿真中根据场景播放时间输出并筛选当前时刻下的交通参与者,提升仿真效率;
39、3、本申请可根据使用需求,自行创建修改3d障碍物模型并简化,提升仿真效率的同时保障良好的可视化效果。
技术特征:1.一种自动驾驶仿真测试方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种自动驾驶仿真测试方法,其特征在于,所述连续行驶补点算法为:
3.根据权利要求1所述的一种自动驾驶仿真测试方法,其特征在于,在删除交通参与者的轨迹点中的自车停车轨迹点前,包括:
4.根据权利要求1所述的一种自动驾驶仿真测试方法,其特征在于,在得到新交通参与者信息后,包括:
5.根据权利要求4所述的一种自动驾驶仿真测试方法,其特征在于,所述动态化算法为:
6.根据权利要求1所述的一种自动驾驶仿真测试方法,其特征在于,新交通参与者信息包括交通参与者外廓信息,交通参与者外廓信息包括若干属性对象,根据新交通参与者信息,进行自动驾驶仿真测试前,包括:
7.根据权利要求1所述的一种自动驾驶仿真测试方法,其特征在于,根据新交通参与者信息,进行自动驾驶仿真测试,包括:
8.根据权利要求7所述的一种自动驾驶仿真测试方法,其特征在于,将时间戳参考交通参与者列表、系统仿真时间、预设定的场景模型输入至预置的仿真测试系统得到自动驾驶仿真场景后,包括:
9.一种自动驾驶仿真测试系统,其特征在于,包括:
10.电子设备,其特征在于,包括处理器、存储器和收发器,所述存储器用于存储指令,所述收发器用于和其他设备通信,所述处理器用于执行所述存储器中存储的指令,以使所述电子设备执行如权利要求1-8任意一条所述的方法。
技术总结本发明提供一种自动驾驶仿真测试方法、系统及设备,包括以下步骤:获取交通参与者信息,其中,交通参与者信息包括交通参与者的轨迹点;删除交通参与者的轨迹点中的自车停车轨迹点;根据连续行驶补点算法,补充规律的新轨迹点代替自车停车轨迹点,得到新交通参与者信息;根据新交通参与者信息,进行自动驾驶仿真测试。本申请可复现真实的、连续的、复杂的测试场景,可自动化、快速处理场景数据,提升场景复现效率,能够很好地应对场景截断问题,提高人员、财产安全系数;在仿真中根据场景播放时间输出并筛选当前时刻下的交通参与者,提升仿真效率;本申请可根据使用需求,自行修改简化模型,提升仿真效率的同时保障良好的可视化效果。技术研发人员:王宜馨,陈笃廉,刘明春,李春,张智清,张飞,赵舟受保护的技术使用者:金龙联合汽车工业(苏州)有限公司技术研发日:技术公布日:2024/9/12本文地址:https://www.jishuxx.com/zhuanli/20240914/296469.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表