二维矢量弯曲传感器及制备方法、二维矢量弯曲测量方法
- 国知局
- 2024-09-14 14:59:38
本发明涉及二维矢量弯曲参数测量领域,具体涉及二维矢量弯曲传感器及制备方法、二维矢量弯曲测量方法。
背景技术:
1、矢量弯曲检测在结构健康监测、智能机械、人体健康等各个领域发挥着极其重要的作用。近年来,光纤传感器因其高灵敏度、尺寸紧凑、抗电磁干扰、远程感知和适用于恶劣环境等特性,在矢量弯曲测量中被广泛应用。根据其方向判别能力的不同,可分为一维和二维传感器。一维矢量弯曲传感器通常通过破坏光纤的圆柱对称性来实现对一维正负方向的识别能力,例如偏心光纤光栅、倾斜光纤光栅、d型光纤和侧向偏移光纤。而二维矢量弯曲传感器可以通过正交串联两个一维传感器、通过多芯光纤嵌套并联多个一维传感器,或者结合多种传感机制来实现。
2、尽管这些传感器已被证明能够测量弯曲曲率并区分方向,但在制造正交串联光纤光栅或将嵌套并联多个一维传感器等方面存在挑战,难以广泛的在二维矢量弯曲检测领域进行应用。
3、而另外的,基于光纤干涉仪的传感器的稳定性和基于光纤布拉格光栅的传感器的灵敏度相对较低,使得二维矢量弯曲检测的灵敏度也较低。
技术实现思路
1、本发明目的在于提供二维矢量弯曲传感器及制备方法、二维矢量弯曲测量方法,以解决现有技术中的二维矢量弯曲传感器制造困难且二维矢量弯曲检测的灵敏度较低的技术问题。
2、为了解决上述技术问题,本发明采用了如下的技术方案:
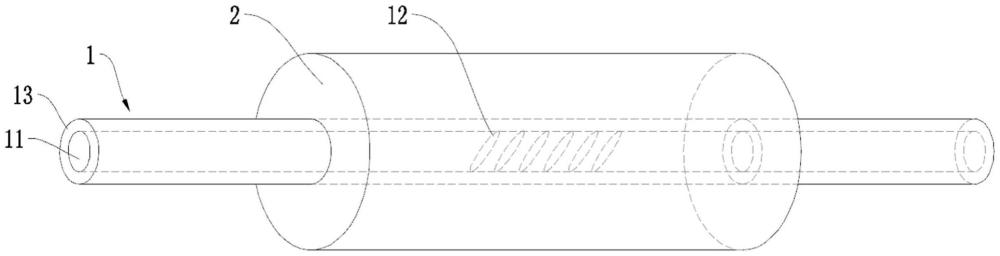
3、第一方面,本发明公开了一种二维矢量弯曲传感器,包括光纤,所述光纤上具有光栅,所述光栅沿固定倾斜角度倾斜,所述光纤被封装于柔性圆柱体内的偏离中性轴位置处形成非对称结构。本发明中,因为具有固定倾斜角度光栅的光纤嵌入在圆柱体的非中性轴位置,所以由所述光纤和圆柱体组成的传感器是一个非对称结构,满足了一维矢量弯曲传感的条件。本发明公开的二维矢量弯曲传感器是首次通过单根光纤光栅实现二维矢量弯曲传感,而不需要复杂的结构和破坏光纤,使得横电(te)和横磁(tm)模式都获得了一维弯曲传感能力。利用这两种模式的弯曲灵敏度之间的正交关系,相当于正交串联了两个一维传感器,使得测量结果由于被两种模式的限制而具有唯一性,从而实现了二维矢量弯曲传感的功能,并且具有较高的检测灵敏度。
4、作为优选,所述光纤采用极大倾角光纤光栅(extfg),所述极大倾角光纤光栅的光栅倾斜角度所述光栅的倾斜角度大于66.9°。发明所采用的二维矢量弯曲传感器仅使用一个裸极大倾角光纤光栅,结构简单稳定,易于制造,并允许根据实际需求选择不同的离轴距离,以实现最佳的弯曲灵敏度。
5、作为优选,所述光栅的倾斜角度为81°,轴向上的光栅周期为28μm。所述极大倾角光纤光栅的光栅倾斜角度远大于标准的倾斜光纤布拉格光栅(tfbg)的典型角度(通常小于45°);由于其倾斜角度非常大,extfg的轴向周期(28μm)远大于标准的tfbg,具有与长周期光纤光栅(lpfg)类似的一些特性(如模式耦合和对特定物理量的高度敏感性)。
6、作为优选,所述柔性圆柱体材质采用固化的第一紫外胶制作而成。
7、作为优选,所述极大倾角光纤光栅的表面涂覆有一层第二紫外胶,所述第二紫外胶为低折射率紫外胶,所述第二紫外胶的折射率为1.327,所述固化的第一紫外胶包覆于第二紫外胶外周。因为extfg对周围介质的折射率(sri)变化具有很高的灵敏度,周围介质的折射率变化可能会影响extfg的性能,比如改变其谐振波长或影响其传感特性;采用的第二紫外胶的折射率只有1.327,这个数值低于光纤包层的折射率,这样可以减少由于折射率不连续性引起的模式耦合或光的散射,有助于维持extfg的长期稳定性,确保传感器在不同环境条件下都能保持其传感性能;涂覆的第二紫外胶不仅起到折射率匹配的作用,还为extfg提供了物理保护,防止环境因素(如机械刮擦、湿度、温度变化等)对其造成的损害;紫外胶的固化过程快速且可控,有利于传感器的快速制造。
8、作为优选,所述二维矢量弯曲传感器的截面直径范围在1~5mm,其中,所述柔性圆柱体的直径与极大倾角光纤光栅的纤芯直径比范围是100:1~625:1,且所述二维矢量弯曲传感器的直径与有效长度比为1:14~1:35。这样能够使得二维矢量弯曲传感器保持良好的柔韧性和延展性,同时还能保持一定的机械稳定性,且柔性圆柱体的柔韧性和延展性能够使得其可以在多次测量后恢复到原始形状,以能够适应多次测量,延长使用寿命。
9、作为二维矢量弯曲传感器尺寸的优选方案,所述柔性圆柱体的截面直径为2.5mm,所述二维矢量弯曲传感器的有效长度为7mm。那么,虽然柔性圆柱体是通过固化紫外胶而成的,但其很小的直径使其保持了柔韧性和延展性,使其能够很好的贴合在物体表面,且柔性圆柱体的柔韧性和延展性能够使得其可以在多次测量后恢复到原始形状,以能够适应多次测量,延长使用寿命。
10、第二方面,本发明还公开了一种二维矢量弯曲传感器的制备方法,利用如上所述的二维矢量弯曲传感器,包括以下步骤:
11、s1、制作用于制备二维矢量弯曲传感器的模具,所述模具包括夹持件,所述夹持件上设置有用于放置软管的安置位,所述软管为圆柱状;所述夹持件的两端分别可拆卸的安装有第一定位件和第二定位件,所述第一定位件和第二定位件上分别开设有位置对应的第一穿孔和第二穿孔,所述第一穿孔和第二穿孔的中心连线与所述安置位的延伸方向平行,且位于偏离所述软管中轴线的位置处;
12、s2、所述第一穿孔和第二穿孔的内径与所述光纤外径过盈配合;将具有固定倾斜角度光栅的光纤自第一穿孔穿入,并穿过软管后,自第二穿孔穿出,且保证光栅区域位于软管内,然后保持光纤为拉直状态;
13、s3、将第一紫外胶自软管的一端均匀的注入软管中,然后用紫外光照射软管,直至第一紫外胶完全固化;
14、s4、将第一定位件和第二定位件自夹持件两端拆离,并取出软管,从软管中取出包覆有固化的第一紫外胶的光纤,即得到二维矢量弯曲传感器。
15、第三方面,本发明还公开了一种二维矢量弯曲测量方法,利用如上所述的二维矢量弯曲传感器,包括以下步骤:
16、a1、基于纯弯曲模型构建二维矢量弯曲参数检测模型,得到二维矢量弯曲传感器的曲率与轴向应变和离轴距离的关系式,并根据实际需要的二维矢量弯曲最大测量曲率以及已知的光纤允许的最大轴向应变,确定离轴距离;
17、a2、根据离轴距离制备二维矢量弯曲传感器,并对制备的二维矢量弯曲传感器进行矢量弯曲灵敏度标定,得到二维矢量弯曲传感器的矢量弯曲灵敏度曲线图;
18、a3、使所述二维矢量弯曲传感器同时处于te和tm等激励状态,并在等激励态下同时监测tm和te模式的谐振波长变化;
19、a4、根据tm和te模式的谐振波长变化,结合tm和te模式的矢量弯曲灵敏度拟合函数,计算得到二维矢量弯曲参数。
20、作为优选,步骤a4中,所述矢量弯曲灵敏度拟合函数为:
21、
22、式中:ω为光纤中心与二维矢量弯曲传感器截面中心点的连线相对于截面竖直对称轴的夹角,θ为二维矢量弯曲传感器的弯曲方向,deff为有效偏离轴距离,a、y0、b、θc均是常量。
23、本发明具有以下有益效果:本发明公开的二维矢量弯曲传感器大大简化了传感器的制造难度,通过单根光纤光栅实现二维矢量弯曲传感,而不需要复杂的结构和破坏光纤,同时,使得横电(te)和横磁(tm)模式都获得了一维弯曲传感能力,利用这两种模式的弯曲灵敏度之间的正交关系,相当于正交串联了两个一维传感器,使得测量结果由于被两种模式的限制而具有唯一性,从而实现了二维矢量弯曲传感的功能,并且具有较高的检测灵敏度;与基于光纤布拉格光栅的传感器相比,它具有更高的灵敏度,与基于光纤干涉仪的传感器相比,其工作稳定性更高,同时还具有低温串扰特性;该传感器在复杂环境下的结构健康监测和智能机械等领域具有广阔的应用前景。
本文地址:https://www.jishuxx.com/zhuanli/20240914/296613.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。