一种农业机器人
- 国知局
- 2024-09-14 15:07:29
本发明属于农业机械,特别是涉及一种农业机器人。
背景技术:
1、近年来,中国在农业科技创新和应用方面取得了显著成就,特别是在智慧农业领域,大数据、云计算和人工智能等现代信息技术的融合发展,为农业生产全过程带来了深刻变革。大型机械设备在广阔的田野中得到广泛应用,极大地提升了生产效率。然而,在小范围土地上,例如温室大棚等地方,传统的人工劳作仍然占据主导地位,而且现有的设备主要是半自动化的小型机械,如除草机和播种机等,均需要人工辅助操作。这种情况表明,虽然农业机械化已经取得了显著进展,但在小规模土地种植领域,仍需要进一步的技术创新和设备更新,以满足不同规模农业生产的需求,提高劳动效率,降低劳动强度。
2、此外,传统的农业机器人存在着功能单一的限制,通常只能执行单一任务,如播种或除草等。这种单一功能设计导致了机器人的使用效率受到一定程度的影响。同时,基于gps定位和传统的机器视觉图像处理技术的巡航方案存在一些问题,如鲁棒性差、适应性不强,容易受到环境因素的影响。这意味着在实际农业生产中,这些机器人可能面临着无法准确执行任务或在复杂环境中表现不佳的挑战。
技术实现思路
1、本发明的目的在于提供一种农业机器人,通过在底盘系统上安装了喷洒系统、视觉系统、电控系统,并可拆卸地安装播种系统,实现了一种用于大棚等小型田间农作物的播种、施肥、浇水、巡检等一体化设备,解决现有技术中业机器人存在着功能单一的限制,通常只能执行单一任务的问题。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
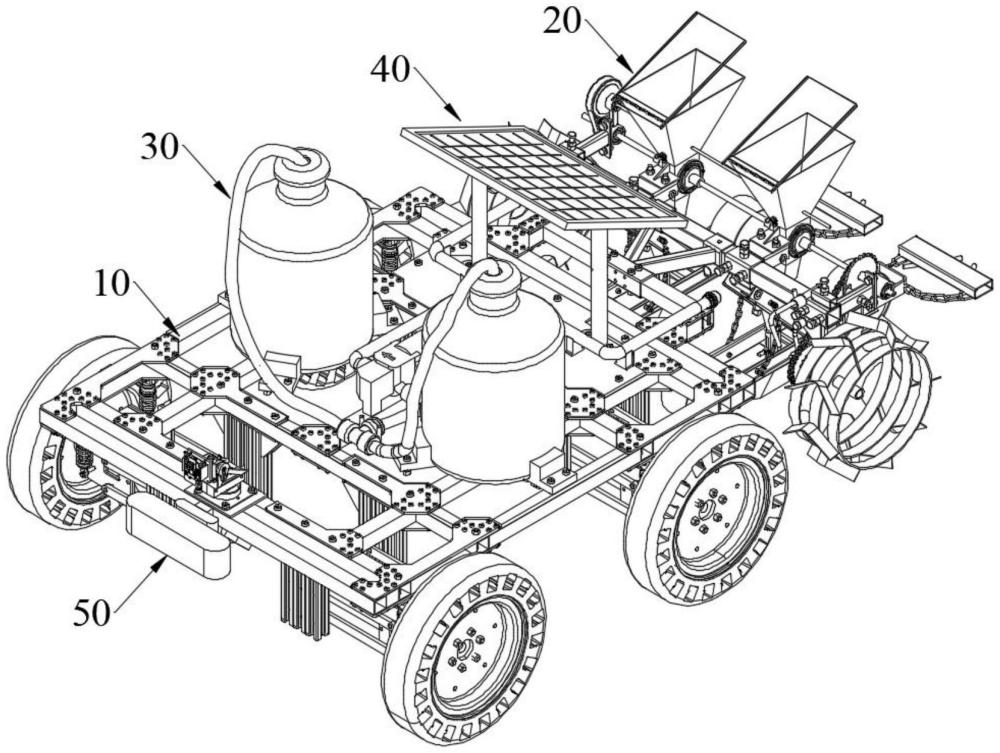
3、本发明为一种农业机器人,包括底盘系统,用于带动机器人跨设在种植垄上行走;
4、播种系统,与底盘系统可拆卸地连接,用于自动播种;
5、喷洒系统,安装在底盘系统上,用于喷洒水肥、农药;
6、视觉系统,安装在底盘系统上,包括深度相机,用于摄录并处理农作物的生长状态图像;
7、电控系统,与底盘系统、播种系统、喷洒系统、视觉系统均联接,用于处理接受的数据并控制机器人运行;
8、所述电控系统通过无线模块联接有云端数据库,所述云端数据库包括行走路径数据库和病虫害图像数据库。
9、作为本发明的一种优先技术方案,所述电控系统包括主控板和速度传感器、gps定位模块。
10、作为本发明的一种优先技术方案,所述底盘系统包括底盘框架和若干沿底盘框架长度方向排列设置且对称安装在底盘框架下方两侧的悬挂机构,以及若干转动安装在悬挂机构上的车轮组件,每个车轮组件采用独立电机驱动。
11、作为本发明的一种优先技术方案,所述播种系统包括若干用于均匀投放种子的漏种机构、若干用于开沟并将种子填埋在沟内的破土覆土机构,以及用于带动漏种机构和破土覆土机构运行的驱动机构;所述漏种机构固定安装在破土覆土机构上,若干所述破土覆土机构22)固定安装在驱动机构上,所述驱动机构与底盘系统可拆卸地连接。
12、作为本发明的一种优先技术方案,所述喷洒系统包括储水箱、水泵、喷洒头以及用于连接各部件的喷洒管路,所述储水箱和水泵固定安装在底盘系统上,沿行走方向,所述喷洒头延伸至机器人后方。
13、作为本发明的一种优先技术方案,还包括用于提供能源的光伏系统,所述光伏系统包括光伏板的蓄电池,所述蓄电池与底盘系统、喷洒系统、视觉系统、电控系统均联接。
14、作为本发明的一种优先技术方案,还包括远端显示操作界面,所述远端显示操作界面与电控系统通过无线模块联接,所述远端显示操作界面包括机器人信息管理界面、远程监控和控制界面、数据收集和分析界面、安全管理界面、用户界面和用户管理界面。
15、作为本发明的一种优先技术方案,所述病虫害图像数据库包括用于处理图像的mobilenetv系列模型。
16、本发明具有以下有益效果:
17、1、本发明通过利用gps定位控制底盘系统按设定路径行走行走,同时配合视觉系统,使得业机器人不仅能够更有效地完成导航任务,还能够在使用过程中及时发现病虫害问题,为农业生产提供了更可靠的支持和保障。
18、2、本发明通过设置喷洒系统,针对农作物生产周期中常见的病虫害问题,视觉系统检测到病虫害问题后,喷洒系统能够及时启动农药喷洒功能,大大提高了机器人的使用效率,并且降低了人力管理成本。
19、3、本发明通过在底盘系统上可拆卸地连接播种系统,模块化设计允许快速拆卸和重装,便于维护和升级,同时机器人平时可作为农场的巡检使用,安装播种系统后,也可以自动进行播种操作,满足多种场景的使用需求。
20、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:1.一种农业机器人,其特征在于,包括:
2.根据权利要求1所述的一种农业机器人,其特征在于,所述电控系统包括主控板和速度传感器、gps定位模块。
3.根据权利要求2所述的一种农业机器人,其特征在于,所述底盘系统(10)包括底盘框架和若干沿底盘框架长度方向排列设置且对称安装在底盘框架下方两侧的悬挂机构,以及若干转动安装在悬挂机构上的车轮组件,每个车轮组件采用独立电机驱动。
4.根据权利要求2所述的一种农业机器人,其特征在于,所述播种系统(20)包括若干用于均匀投放种子的漏种机构(21)、若干用于开沟并将种子填埋在沟内的破土覆土机构(22),以及用于带动漏种机构(21)和破土覆土机构(22)运行的驱动机构(23);所述漏种机构(21)固定安装在破土覆土机构(22)上,若干所述破土覆土机构22)固定安装在驱动机构(23)上,所述驱动机构(23)与底盘系统(10)可拆卸地连接。
5.根据权利要求2所述的一种农业机器人,其特征在于,所述喷洒系统(30)包括储水箱、水泵、喷洒头以及用于连接各部件的喷洒管路,所述储水箱和水泵固定安装在底盘系统(10)上,沿行走方向,所述喷洒头延伸至机器人后方。
6.根据权利要求2所述的一种农业机器人,其特征在于,还包括用于提供能源的光伏系统(40),所述光伏系统(40)包括光伏板的蓄电池,所述蓄电池与底盘系统(10)、喷洒系统(30)、视觉系统(50)、电控系统均联接。
7.根据权利要求1-6任意一项所述的一种农业机器人,其特征在于,还包括远端显示操作界面,所述远端显示操作界面与电控系统通过无线模块联接,所述远端显示操作界面包括机器人信息管理界面、远程监控和控制界面、数据收集和分析界面、安全管理界面、用户界面和用户管理界面。
8.根据权利要求7所述的一种农业机器人,其特征在于,所述病虫害图像数据库包括用于处理图像的mobilenetv系列模型。
技术总结本发明公开了一种农业机器人,涉及农业机械技术领域。本发明包括底盘系统、播种系统、喷洒系统、视觉系统和电控系统,播种系统与底盘系统可拆卸地连接,用于自动播种;视觉系统安装在底盘系统上,用于摄录并处理农作物的生长状态图像;电控系统与底盘系统、播种系统、喷洒系统、视觉系统均联接;电控系统通过无线模块联接有云端数据库,云端数据库包括行走路径数据库和病虫害图像数据库。本发明通过在底盘系统上安装了喷洒系统、视觉系统、电控系统,并可拆卸地安装播种系统,实现了一种用于小型田间农作物的一体化设备,不仅能够更有效地完成导航任务,还能够在生产过程中及时应对病虫害问题,为农业生产提供了更可靠的支持和保障。技术研发人员:王一科,李海涛,贺一凡,李文辉,龙昊,孙雯,刘宁,金宇奇,吴炜,常涵宇受保护的技术使用者:合肥工业大学技术研发日:技术公布日:2024/9/12本文地址:https://www.jishuxx.com/zhuanli/20240914/297044.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表