一种基于深度学习的飞机失速场景识别方法及系统
- 国知局
- 2024-09-14 15:15:12
本发明涉及飞机失速,尤其涉及一种基于深度学习的飞机失速场景识别方法及系统。
背景技术:
1、失速可以发生在飞行的任何一个阶段,飞机失速对飞行安全会带来难以估计的影响。失速是指飞机迎角超过临角迎角,不能保持正常飞行的现象。飞机在飞行过程中,相对气流通过飞机机翼上下表面时,由于气流在上下翼面的流速不同,进而压力不同产生压差,当机翼下翼面产生的压力大于机翼上翼面产生的升力时飞机获得升力。飞机在飞行过程中失速的根本原因是由于飞机在飞行过程中迎角大于失速迎角(stalling angle)继而导致飞机机翼上表面气流发生分离产生湍流,当机翼上翼面产生的压力使机翼受到的合力无法产生维持飞机飞行的升力时,飞机进入失速状态。
2、现有的基于深度学习的失速预测和识别方法主要是基于有监督学习的方法,有监督的学习方法需要为采集到的飞参数据进行标记。现有的标记方法为,基于确定性失速迎角的判断方法,例如大于给定的失速迎角,则标记失速,小于某失速迎角,则标记非失速。但是由于失速迎角在不同情况下为不同值,即失速迎角为非常量,然而现有技术的标记方法与失速迎角为非常量的真实情况有区别,仅依赖一个确定的临界阈值来判断飞机在各种情况下的失速状态是不充分的,容易导致飞机飞行存在安全隐患。
3、因此,亟需一种基于深度学习的飞机失速场景识别方法及系统,能够根据不同飞行场景动态判断飞机是否失速,从而准确、高效地对飞机失速情况进行快速识别,适用性更强,保证飞机飞行安全稳定性。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种基于深度学习的飞机失速场景识别方法及系统,能够根据不同飞行场景动态判断飞机是否失速,从而准确、高效地对飞机失速情况进行快速识别,适用性更强,保证飞机飞行安全稳定性。
2、本发明提供了一种基于深度学习的飞机失速场景识别方法,包括如下步骤:
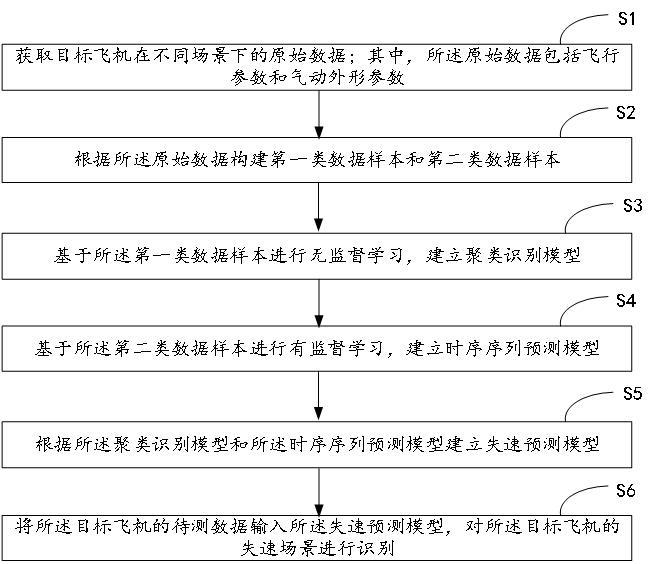
3、s1、获取目标飞机在不同场景下的原始数据;其中,原始数据包括飞行参数和气动外形参数;
4、s2、根据原始数据构建第一类数据样本和第二类数据样本;
5、s3、基于第一类数据样本进行无监督学习,建立聚类识别模型;
6、s4、基于第二类数据样本进行有监督学习,建立时序序列预测模型;
7、s5、根据聚类识别模型和时序序列预测模型建立失速预测模型;
8、s6、将目标飞机的待测数据输入失速预测模型,对目标飞机的失速场景进行识别。
9、进一步的,s2中,根据原始数据构建第一类数据样本包括:
10、s21a、根据原始数据构建第一数据矩阵x;
11、第一数据矩阵表达式如下:
12、x=[xij];
13、其中,xij表示第i个数据样本在第j个特征上的观测值,特征即原始数据包含的飞行参数和气动外形参数,i=1,2,...,n,j=1,2,...,p,n表示数据样本的总数,p表示特征的总数;
14、s22a、对第一数据矩阵x中各元素进行归一化处理,得到第一类数据矩阵,作为第一类数据样本。
15、进一步的,s22a中,对第一数据矩阵x中各元素进行归一化处理包括:
16、使用min-max归一化方法对第一数据矩阵x中各元素进行归一化处理,归一化公式如下:
17、;
18、其中,表示第i个数据样本在第j个特征上经过归一化处理之后的观测值,xij表示第i个数据样本在第j个特征上的观测值;xminj表示在第j个特征上的观测值的最小值,xmaxj表示在第j个特征上的观测值的最大值。
19、进一步的,s2中,根据原始数据构建第二类数据样本包括:
20、s21b、根据第一类数据矩阵构建第二数据矩阵y;
21、第二数据矩阵表达式如下:
22、y=[ysj];
23、其中,ysj表示第s个预测数据样本在第j个特征上的观测值s=1,2,...,(n-k-n+1),j=1,2,...,p,k表示预测的时间步长,n表示每次预测需要记录的历史数据步长,(n-k-n+1)表示预测数据样本的总数,p表示特征的总数;
24、s22b、根据第一类数据矩阵构建三维矩阵;
25、s23b、根据第二数据矩阵和三维矩阵构建第二类数据矩阵xy,作为第二类数据样本。
26、进一步的,s3中,基于第一类数据样本进行无监督学习,建立聚类识别模型包括:
27、s31、设置聚类数目为2,通过聚类算法对第一类数据样本进行聚类计算,得到两种聚类结果;
28、s32、设置失速迎角的上限值和下限值,根据失速迎角的上限值和下限值对第一类数据样本打标签;
29、s33、根据打标签的结果对聚类算法得到的两种聚类结果进行正确率评估;
30、s34、当存在一个正确率大于预设正确率的聚类结果,则将该聚类结果作为最终的分类结果;
31、当两种聚类结果的正确率均大于预设正确率,则将二者中正确率更高的聚类结果作为最终的分类结果;
32、当两种聚类结果的正确率均小于等于预设正确率,则使用优化算法对聚类算法进行优化。
33、进一步的,s4中,基于第二类数据样本进行有监督学习,建立时序序列预测模型包括:
34、s41、构建神经网络模型;
35、其中,输入层的节点数与第二类数据样本中的三维矩阵的元素数量一致,输入层的节点数为n×p;输出层的节点数与第二类数据样本中的第二数据矩阵的元素数量一致,输出层的节点数为p;
36、s42、将第二类数据样本划分为训练集和测试集,对神经网络模型进行训练和测试,得到时序序列预测模型。
37、进一步的,s6中,将目标飞机的待测数据输入失速预测模型,对目标飞机的失速场景进行识别包括:
38、s61、对目标飞机的待测数据进行归一化处理;其中,待测数据包括目标飞机当前时刻及当前时刻之前的(n-1)个时刻的原始数据;
39、s62、将经过归一化处理的待测数据输入到失速预测模型的时序序列预测模型中,对当前时刻之后的第k个时刻的原始数据进行预测;
40、s63、将预测得到的第k个时刻的原始数据输入失速预测模型的聚类识别模型中,输出预测结果;
41、s64、根据失速预测模型输出的预测结果进行判断;若预测结果表示失速,则触发报警机制进行报警;若预测结果表示正常,则不进行报警。
42、进一步的,飞行参数包括:飞行迎角、飞行空速、飞行姿态、过载、减速率;其中,飞行姿态包括俯仰角、偏航角和滚转角;
43、气动外形参数包括:襟翼角度、缝翼角度、起落架状态、结冰状态。
44、本发明还提供了一种基于深度学习的飞机失速场景识别系统,用于执行上述任一项所述的一种基于深度学习的飞机失速场景识别方法,系统包括以下模块:
45、数据获取模块,用于获取目标飞机在不同场景下的原始数据;其中,原始数据包括飞行参数和气动外形参数;
46、数据样本构建模块,与数据获取模块连接,用于根据原始数据构建第一类数据样本和第二类数据样本;
47、聚类识别模型建立模块,与数据样本构建模块连接,用于基于第一类数据样本进行无监督学习,建立聚类识别模型;
48、时序序列预测模型建立模块,与数据样本构建模块连接,用于基于第二类数据样本进行有监督学习,建立时序序列预测模型;
49、失速预测模型建立模块,与聚类识别模型建立模块和时序序列预测模型建立模块连接,用于根据聚类识别模型和时序序列预测模型建立失速预测模型;
50、识别模块,与失速预测模型建立模块连接,用于将目标飞机的待测数据输入失速预测模型,对目标飞机的失速场景进行识别。
51、本发明实施例具有以下技术效果:
52、本发明通过无监督学习构建聚类识别模型,将失速迎角视为非常量智能化地打标签,以适应失速迎角为非常量的本质,从而达到该方法能够适用于不同飞行条件下的失速场景识别,再通过有监督学习构建时序序列预测模型,结合聚类识别模型和时序序列预测模型得到失速预测模型,依据实时的飞行原始数据来正确标记飞机的失速迎角,而不是仅仅依赖于一个固定的临界失速迎角,从而实现在不同飞行场景下动态判断飞机是否失速,准确、高效地对飞机失速情况进行快速识别,适用性更强,保证飞机飞行安全稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20240914/297536.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表