一种路径自动调整的点焊机器人伺服驱动系统及其方法与流程
- 国知局
- 2024-09-19 14:37:02
本发明涉及智能制造,具体为一种路径自动调整的点焊机器人伺服驱动系统及其方法。
背景技术:
1、随着制造业的快速发展,特别是在汽车制造领域,白车身点焊工艺对焊接质量和效率的要求日益提高。传统的点焊机器人路径规划依赖于工程师的示教实验,这不仅耗时耗力,而且难以找到最佳路径,尤其是在焊点数量巨大的情况下,路径规划结果因人而异,缺乏数学模型的支持。因此,研究并开发一种能够自动调整路径的点焊机器人伺服驱动系统及方法,对于提升焊接作业的自动化水平和生产效率具有重要意义。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种路径自动调整的点焊机器人伺服驱动系统及其方法,具备自动调整路径的优点,解决了路径规划困难的问题。
3、(二)技术方案
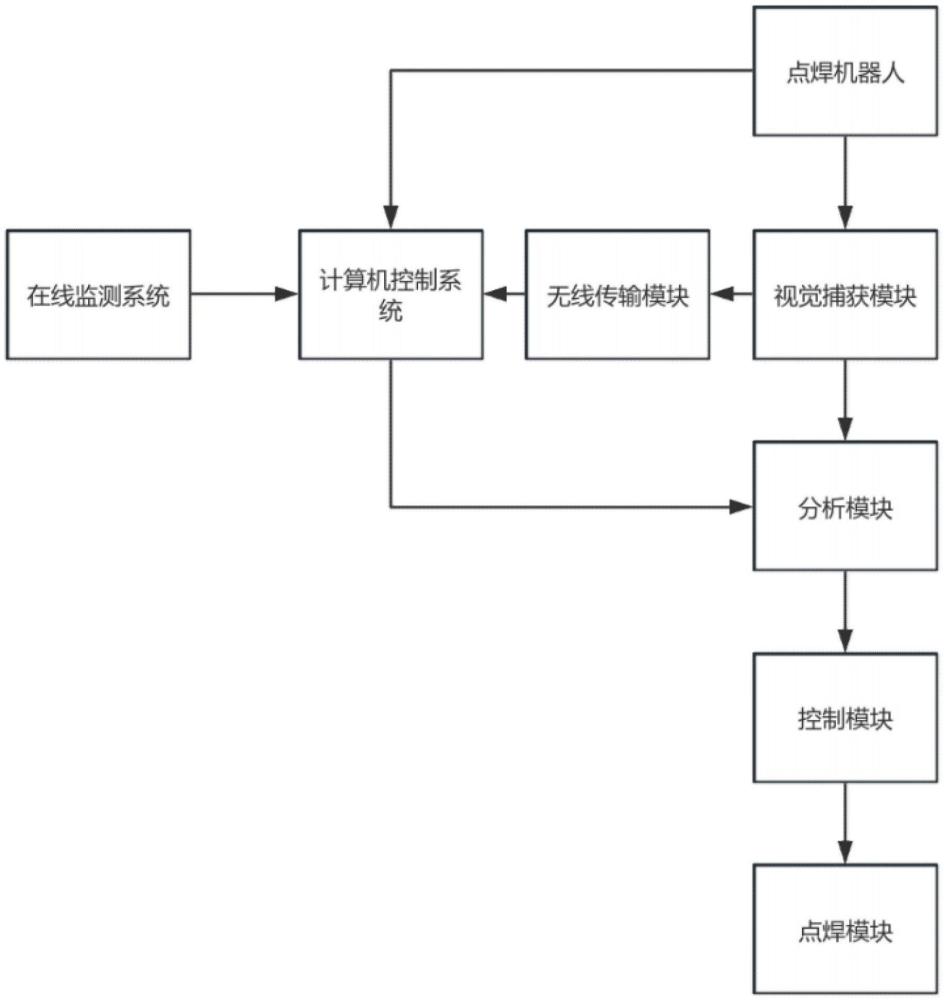
4、为实现上述目的,本发明提供如下技术方案:一种路径自动调整的点焊机器人伺服驱动系统,系统由以下部分组成:在线监测系统、计算机控制系统与点焊机器人;
5、所述在线监测系统负责监测电焊区域内的环境数据集,并通过无线网络将环境数据集传输至计算机控制系统进行数据集预处理分类;
6、所述计算机控制系统负责接收在线监测系统的数据集与点焊机器人的图像信息,所述计算机控制系统与点焊机器人通过无线网络连接;
7、所述点焊机器人包括视觉捕获模块、无线传输模块、分析模块、控制模块和点焊模块;所述视觉捕获模块用于捕捉焊接区域的图像信息,所述无线传输模块负责将图像信息传输至计算机控制系统进行图像预处理以提取数据;所述分析模块用于计算从计算机控制系统中提取的数据,并对提取数据进行分类编号;所述控制模块对分析模块的计算结果进行优化,并将优化数据通过无线网络传输至点焊模块,所述点焊模块用于执行电焊命令。
8、优选的,所述计算机系统将电焊区域内的环境数据集通过无线网络传输至点焊机器人的分析模块,所述分析模块对环境数据集进行子集编号,所述分析模块根据电焊区域内的环境数据集特征对其进行子集分类,子集分类为环境温度数据、压力数据与湿度数据,所述环境温度数据、压力数据与湿度数据编号为w1、w2、w3。
9、优选的,所述视觉捕获模块用于捕捉焊接区域的图像信息,其图像信息包括所含区域50%的范围内的微小瑕疵图形、中度瑕疵图形和重度瑕疵图形,并通过计算机系统将其转化成微小瑕疵数据集、中度瑕疵数据集和重度瑕疵数据集,通过实时捕获和处理焊接区域的详细图像信息,系统能够自动调整焊接参数。
10、优选的,所述分析模块对从计算机控制系统中提取的数据进行分类编号;所述微小瑕疵数据集、中度瑕疵数据集和重度瑕疵数据集均分成三个子集,三个子集包括瑕疵长度数据集、瑕疵宽度数据集和瑕疵深度数据集,所述微小瑕疵长度数据集编号为a1、a2、a3、…an,所述微小瑕疵宽度数据集编号为ab1、ab2、ab3、…abn,所述微小瑕疵深度集编号为ac1、ac2、ac3、…acn,所述中度瑕疵长度数据集编号为e1、e2、e3、…en,所述中度瑕疵宽度数据集编号为eb1、eb2、eb3、…ebn,所述中度瑕疵深度集编号为ec1、ec2、ec3、…ecn。
11、优选的,所述重度瑕疵长度数据集编号为t1、t2、t3、…tn,所述重度瑕疵宽度数据集编号为tb1、tb2、tb3、…tbn,所述重度瑕疵深度集编号为tc1、tc2、tc3、…tcn。
12、优选的,所述分析模块根据微小瑕疵长度数据集、微小瑕疵宽度数据集、微小瑕疵深度数据集与环境数据集计算微小焊接点距离指数axsl,其计算公式为:
13、
14、公式中,axsl表示微小焊接点距离指数,n表示微小瑕疵的统计总数,axsl1…axsln表示微小瑕疵从1到n的总数类型,a1、a2、a3、…an表示微小瑕疵长度数据集,ab1、ab2、ab3、…abn表示微小瑕疵宽度数据集,ac1、ac2、ac3、…acn表示微小瑕疵深度集,w1、w2、w3分别表示环境温度数据、压力数据与湿度数据,表示环境数据对微小焊接点距离指数的影响系数,e1、e2、e3分别表示环境温度数据、压力数据与湿度数据在中所占的权重。
15、优选的,所述分析模块根据中度瑕疵长度数据集、中度瑕疵宽度数据集、中度瑕疵深度数据集与环境数据集计算中度焊接点距离指数exsl,其计算公式为:
16、
17、公式中,exsl表示中度焊接点距离指数,n表示中度瑕疵的统计总数,exsl1…exsln表示中度瑕疵从1到n的总数类型,e1、e2、e3、…en表示中度瑕疵长度数据集,eb1、eb2、eb3、…ebn表示中度瑕疵宽度数据集,ec1、ec2、ec3、…ecn表示中度瑕疵深度集,w1、w2、w3分别表示环境温度数据、压力数据与湿度数据,表示环境数据对中度焊接点距离指数的影响系数,e1、e2、e3分别表示环境温度数据、压力数据与湿度数据在中所占的权重。
18、优选的,所述分析模块根据重度瑕疵长度数据集、重度瑕疵宽度数据集、重度瑕疵深度数据集与环境数据集计算重度焊接点距离指数txsl,其计算公式为:
19、
20、公式中,txsl表示重度焊接点距离指数,n表示重度瑕疵的统计总数,txsl1…txsln表示重度瑕疵从1到n的总数类型,t1、t2、t3、…tn表示重度瑕疵长度数据集,tb1、tb2、tb3、…tbn表示重度瑕疵宽度数据集,tc1、tc2、tc3、…tcn表示重度瑕疵深度集,w1、w2、w3分别表示环境温度数据、压力数据与湿度数据,表示环境数据对重度焊接点距离指数的影响系数,e1、e2、e3分别表示环境温度数据、压力数据与湿度数据在中所占的权重。
21、优选的,所述分析模块根据微小焊接点距离指数axsl1、…axsln、中度焊接点距离指数exsl1、…exsln重度焊接点距离指数txsl…txsln来计算焊接易操作性数据集aet,其计算公式为:
22、
23、公式中,aet表示焊接易操作性数据集,axsl1、…axsln表示轻微焊接点距离指数,exsl1、…exsln表示中度焊接点距离指数,txsl…txsln表示重度焊接点距离指数,(axsln∩exsln∩txsln)表示三种程度的焊接点重合区域;
24、所述控制模块根据微小焊接点距离指数axsl1、…axsln、中度焊接点距离指数exsl1、…exsln与重度焊接点距离指数txsl1、…txsln来进行最佳焊接距离参数h计算,其计算公式如下:
25、
26、公式中,h表示最佳焊接距离参数,表示微小焊接点距离指数axsl1、…axsln、中度焊接点距离指数exsl1、…exsln重度焊接点距离指数txsl1、…txsln的集中表达式,h表示点焊机器人通过视觉捕获模块获取的实际距离参数。
27、优选的,一种路径自动调整的点焊机器人伺服驱动方法,所述驱动方法,包括以下步骤:
28、步骤一、在线监测系统监测的环境数据对焊接点距离指数的影响系数的计算;
29、步骤二、计算机控制系统负责接收在线监测系统的数据集与点焊机器人的图像信息,并对接收的信息进行预处理;
30、步骤三、点焊机器人收集上述步骤的数据,并计算出最佳焊接距离参数。
31、与现有技术相比,本发明提供了一种路径自动调整的点焊机器人伺服驱动系统及其方法,具备以下有益效果:
32、1、本发明通过这种路径自动调整的点焊机器人伺服驱动系统,通过其在线监测系统、计算机控制系统和点焊机器人之间的无线连接性协作,在提升焊接质量的同时,也优化了生产效率,在整个系统处理过程中,点焊机器人的分析模块不仅计算出环境温度、压力和湿度对微小、中度和重度焊接点距离指数的影响系数,还有效排除了因环境变化会引起的焊接质量问题,分析模块通过对计算机系统提取的数据集进行子集编号,为后续计算提供了基础性判断。
33、2、本发明通过分析模块对不同焊接点距离指数的深入计算,系统能够综合考虑到环境因素与实际瑕疵的长度、宽度与深度数据的综合影响,在计算排除以后,以确保焊接操作在最佳的条件下进行,从而提高了焊接的精确度,控制模块进一步根据微小焊接点距离指数axsl1、…axsln、中度焊接点距离指数exsl1、…exsln重度焊接点距离指数txsl1、…txsln计算出最佳的焊接距离参数h,在与实际距离的数据比较之下,使得焊接作业能够在最适宜的距离下完成,减少了因为实际距离直接计算引起的焊接偏差。
本文地址:https://www.jishuxx.com/zhuanli/20240919/299169.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表