一种铁塔组立螺栓的双机械臂紧固装置及紧固方法与流程
- 国知局
- 2024-09-19 14:35:52
本发明属于铁塔高空作业设施的。更具体地,本发明涉及一种铁塔组立螺栓的双机械臂紧固装置。本发明还涉及该紧固装置的紧固方法。
背景技术:
1、在现有技术的铁塔组立高空作业螺栓自动化紧固装置中,一般采用机械臂对螺栓、螺母进行紧固。但是,现有技术的问题和缺陷是:目前的紧固装置只包含一个机械臂,同时用于螺栓、螺母取料和紧固动作,而不是通过两个机械臂协同动作进行螺栓紧固作业,效率较低。
2、例如,通过对相关的技术方案进行检索,得到到以下现有公开的技术文献:
3、中国专利文献:“变压器箱盖螺栓紧固系统、方法及机器人”,专利(申请)号:202311153062.1,其记载的技术方案是:
4、“一种变压器箱盖螺栓紧固系统、方法及机器人,该系统包括:自动上料子系统、视觉检测子系统以及与所述视觉检测子系统连接的紧固子系统;
5、其中:
6、自动上料子系统将待紧固箱盖螺栓的变压器输送至第一位置,并将螺栓和垫片输送至第二位置进行螺栓组件的组合,以及将螺母输送至第三位置;
7、视觉检测子系统对变压器的箱盖螺孔进行定位并保存定位信息,之后根据定位信息以及预设螺栓参数信息依次控制紧固子系统将螺栓组件和螺母初步紧固至箱盖螺孔对应的目标位置,之后根据定位信息以及预设螺栓参数信息控制紧固子系统将螺栓组件和螺母二次紧固至目标位置”;
8、其记载的技术效果是:
9、“缓解现有变压器制造方式中存在的生产效率较低和产品质量一致性较差的问题”。
10、但是,上述现有公开的技术文献所记载的技术方案无法解决现有技术中存在的单独机械臂效率低下的问题和缺陷。
技术实现思路
1、本发明提供一种铁塔组立螺栓的双机械臂紧固装置,其目的是提高铁塔高空作业中螺栓螺母紧固的效率。
2、为了实现上述目的,本发明采取的技术方案为:
3、本发明的铁塔组立螺栓的双机械臂紧固装置,包括机架;所述的双机械臂分别为一号机械臂和二号机械臂;所述的一号机械臂进行螺栓的夹取和在待紧固物体上的穿孔;所述的二号机械臂进行螺母与螺栓的紧固连接。
4、所述的一号机械臂上设置夹爪和相机;所述的夹爪从物料盒中夹取螺栓;所述的相机进行螺栓孔的识别和定位。
5、所述的二号机械臂上设置电动紧固套筒,所述的电动紧固套筒从物料盒里获取螺母,并进行螺母的紧固。
6、为了实现与上述技术方案相同的发明目的,本发明还提供以上所述的铁塔组立螺栓的双机械臂紧固装置的紧固方法,其包括以下步骤:
7、步骤1:一号机械臂控制夹爪在物料盒里夹取螺栓;
8、步骤2:夹爪夹取螺栓后,一号机械臂控制夹爪将螺栓移动到待紧固物体附近;
9、步骤3:一号机械臂带着螺栓,进行螺栓穿过螺栓孔的运动;
10、步骤4:在步骤1、步骤2进行的同时,二号机械臂从物料盒里获取螺母并运动到距离待紧固螺栓孔一定距离的位置等待;
11、步骤5:一号机械臂和二号机械臂共同使螺母与螺栓开始连接;
12、步骤6:螺母与螺栓进行紧固。
13、在所述的步骤1中,螺栓在物料盒里的位置可通过机器人示教获得;或者通过相机算法识别得到。
14、在所述的步骤2中,相机系统开始进行拍摄,获得点云数据,通过相机算法获取到螺栓孔相对于一号机械臂工具坐标系下的位姿并发送给一号机械臂。
15、在所述的步骤3中,当螺栓穿过待紧固物体的另一端接近一个螺母的长度时,停止一号机械臂的穿孔动作;一号机械臂的穿孔到位的运动位置可通过螺栓孔位置和螺母的厚度度计算得到。
16、在所述的步骤4中,螺母在物料盒里的位置可通过机器人示教获得;或者通过相机算法识别得到。
17、所述的步骤5是在步骤3、步骤4完成后,二号机械臂夹持螺母由等待位置运动到螺栓位置,对准螺栓并与螺栓接触后,电动紧固套筒进行旋转运动,使螺母与螺栓咬合3-6圈后暂停作业;然后一号机械臂松开夹爪但不移动位置,且使得螺栓只能进行轴向滑动,而不能进行转动;此时夹爪托住螺栓的螺帽一端,电动紧固套筒托住螺母,使螺栓保持水平姿态。
18、所述的步骤6是在步骤5完成后,二号机械臂上的电动紧固套筒继续进行旋转紧固运动;此时,二号机械臂沿螺栓的轴向位置不变,依靠螺栓和螺母的咬合力驱动螺栓向前运动,直到螺栓拧紧,电动紧固套筒停止运动,两个机械臂均回到初始状态,等待进行下一个螺栓螺母紧固工作。
19、本发明采用上述技术方案,采用双机械臂配合、协作完成螺栓螺母的取料和紧固作业,效率有了较大提高;有效防止作业过程中螺栓螺母脱落和螺母拧偏等异常情况。
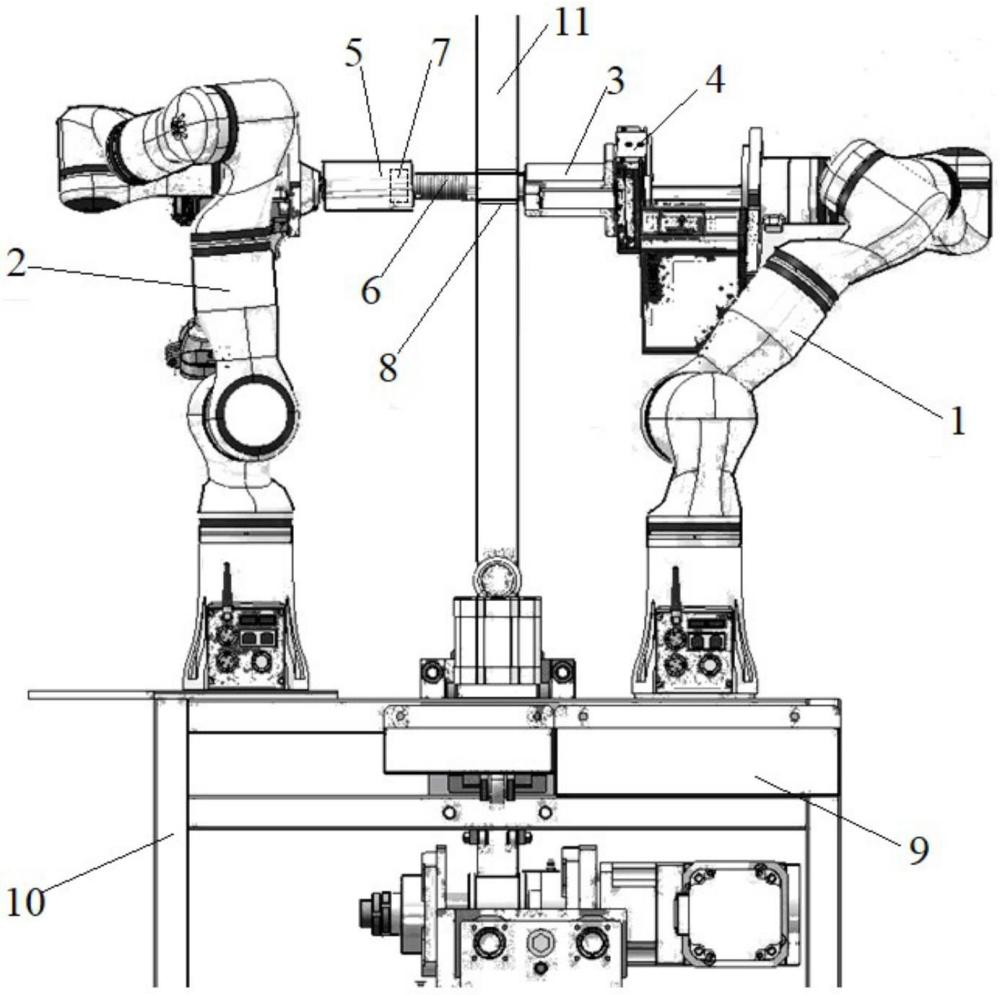
技术特征:1.一种铁塔组立螺栓的双机械臂紧固装置,包括机架(10),其特征在于:所述的双机械臂分别为一号机械臂(1)和二号机械臂(2);所述的一号机械臂(1)进行螺栓(6)的夹取和在待紧固物体(11)上的穿孔;所述的二号机械臂(2)进行螺母(7)与螺栓(6)的紧固连接。
2.按照权利要求1所述的铁塔组立螺栓的双机械臂紧固装置,其特征在于:所述的一号机械臂(1)上设置夹爪(3)和相机(4);所述的夹爪(3)从物料盒(9)中夹取螺栓(6);所述的相机(4)进行螺栓孔(8)的识别和定位。
3.按照权利要求1所述的铁塔组立螺栓的双机械臂紧固装置,其特征在于:所述的二号机械臂(2)上设置电动紧固套筒(5),所述的电动紧固套筒(5)从物料盒(9)里获取螺母(7),并进行螺母(7)的紧固。
4.按照权利要求1或2或3所述的铁塔组立螺栓的双机械臂紧固装置的紧固方法,其特征在于:所述的紧固方法包括以下步骤:
5.按照权利要求4所述的铁塔组立螺栓的双机械臂紧固装置的紧固方法,其特征在于:在所述的步骤1中,螺栓(6)在物料盒(9)里的位置可通过机器人示教获得;或者通过相机(4)算法识别得到。
6.按照权利要求4所述的铁塔组立螺栓的双机械臂紧固装置的紧固方法,其特征在于:在所述的步骤2中,相机(4)系统开始进行拍摄,获得点云数据,通过相机(4)算法获取到螺栓孔(8)相对于一号机械臂(1)工具坐标系下的位姿并发送给一号机械臂(1)。
7.按照权利要求4所述的铁塔组立螺栓的双机械臂紧固装置的紧固方法,其特征在于:在所述的步骤3中,当螺栓(6)穿过待紧固物体(11)的另一端接近一个螺母(7)的长度时,停止一号机械臂(1)的穿孔动作;一号机械臂(1)的穿孔到位的运动位置可通过螺栓孔(8)位置和螺母(7)的厚度度计算得到。
8.按照权利要求4所述的铁塔组立螺栓的双机械臂紧固装置的紧固方法,其特征在于:在所述的步骤4中,螺母(7)在物料盒(9)里的位置可通过机器人示教获得;或者通过相机(4)算法识别得到。
9.按照权利要求4所述的铁塔组立螺栓的双机械臂紧固装置的紧固方法,其特征在于:所述的步骤5是在步骤3、步骤4完成后,二号机械臂(2)夹持螺母(7)由等待位置运动到螺栓(6)位置,对准螺栓(6)并与螺栓(6)接触后,电动紧固套筒(5)进行旋转运动,使螺母(7)与螺栓(6)咬合3-6圈后暂停作业;然后一号机械臂(1)松开夹爪(3)但不移动位置,且使得螺栓(6)只能进行轴向滑动,而不能进行转动;此时夹爪(3)托住螺栓(6)的螺帽一端,电动紧固套筒(5)托住螺母(7),使螺栓(6)保持水平姿态。
10.按照权利要求4所述的铁塔组立螺栓的双机械臂紧固装置的紧固方法,其特征在于:所述的步骤6是在步骤5完成后,二号机械臂(2)上的电动紧固套筒(5)继续进行旋转紧固运动;此时,二号机械臂(2)沿螺栓(6)的轴向位置不变,依靠螺栓(6)和螺母(7)的咬合力驱动螺栓(6)向前运动,直到螺栓(6)拧紧,电动紧固套筒(5)停止运动,两个机械臂均回到初始状态,等待进行下一个螺栓螺母紧固工作。
技术总结本发明公开了一种铁塔组立螺栓的双机械臂紧固装置,包括机架(10),所述的双机械臂分别为一号机械臂(1)和二号机械臂(2);所述的一号机械臂(1)进行螺栓(6)的夹取和在待紧固物体(11)上的穿孔;所述的二号机械臂(2)进行螺母(7)与螺栓(6)的紧固连接。本发明还公开了该紧固装置的紧固方法。采用上述技术方案,采用双机械臂配合、协作完成螺栓螺母的取料和紧固作业,效率有了较大提高;有效防止作业过程中螺栓螺母脱落和螺母拧偏等异常情况。技术研发人员:尹东,赵立军,袁博,张宝栋,曹雏清,周红光,刘志恒,王玉斌,王文周,于乐征,石星昊受保护的技术使用者:国网山东省电力公司聊城供电公司技术研发日:技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/299075.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表