一种用于菠萝采摘的智能识别设备的制作方法
- 国知局
- 2024-09-19 14:45:53
本发明属于农业种植,具体是一种用于菠萝采摘的智能识别设备。
背景技术:
1、菠萝是世界第三大、我国第四大热带水果作物,因其味道香甜、可口、富含维生素广受消费者喜爱。我国菠萝主要种植区域涉及广东、海南、福建、云南等多个省区,其中广东省湛江市徐闻县是中国最大的菠萝生产基地,在全国拥有“每3个菠萝就有1个来自徐闻”的美誉,种植面积约35万亩,年产量90多万t。虽然我国菠萝种植面积和产量位居世界前列,但田间生产方式和管理技术相对落后,而且受菠萝种植农艺多样化的影响,菠萝机械化生产及管理难以实施,导致种植、田间管理(施肥、催花、喷药等)、采收、转运等关键环节基本依靠人工完成。菠萝又属于劳动密集型产业,生产周期短,劳动用工需求量大,我国人口老龄化加重,农村劳动力缺乏、用工荒等问题使得菠萝产业发展受限。
2、现有技术中使用人工识别采摘,辅助高地隙履带自走式菠萝采收车的方式,进行采摘,上述方案虽然能够大幅度降低工人的劳动强度,但该方案仅能辅助工人进行田间菠萝的搬运,无法辅助工人进行菠萝的采摘,人工参与度较高致使人工成本也随之上升。现有技术中使用图像识别联合柔性滚筒进行非选择性采收的方案,虽然能够解决上述问题,但使用该方案时柔性滚筒容易对菠萝裔芽、吸芽造成损伤,从而影响后续育苗。现有技术中还使用图像识别联合机械爪的方案进行选择性采收,但该方案采用逐个采摘的方式,效率较低,难以适应大范围采摘的使用场景。
技术实现思路
1、本发明的目的是提供一种用于菠萝采摘的智能识别设备,用以降低菠萝采摘过程中设备对菠萝植株的影响。
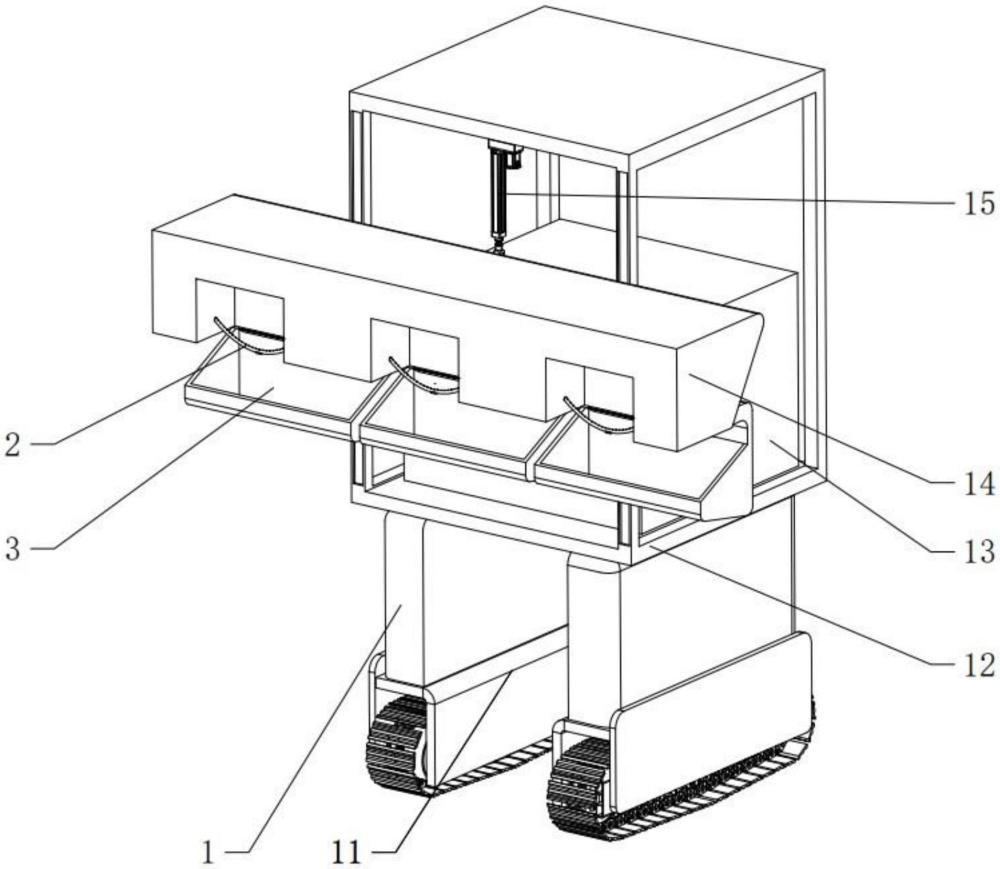
2、为了实现上述目的,本发明的技术方案如下:一种用于菠萝采摘的智能识别设备,包括移动组件,移动组件上设有若干采摘组件和与采摘组件对应的接收组件,采摘组件均包括气泵、采收绳和对称布置的驱动腔,采收绳上设有配重块,采收绳两端均固定连接有活塞,且活塞均与相邻的驱动腔内侧壁滑动配合,任意一驱动腔靠近采收绳的侧边上开有孔,且孔布置于采收绳上方,该驱动腔通过孔与外界连通,且连通处设有第一电磁阀,气泵用于驱动活塞和接收组件工作,移动组件用于带动采摘组件和接收组件移动,接收组件用于接收采摘组件采摘的菠萝;
3、还包括控制系统,控制系统用于根据菠萝的位置和成熟状态控制气泵和第一电磁阀工作,从而对采收绳形态进行调整,控制系统还用于控制接收组件工作。
4、进一步,接收组件均包括接收腔,接收腔内滑动配合有接收板,且接收腔均与气泵连通,连通处设有第二电磁阀,接收板下方设有接收篮,接收篮与移动组件固定连接,控制系统还用于控制第二电磁阀工作。
5、进一步,接收板顶壁均固定连接有若干纤维环。
6、进一步,控制系统包括摄像头和控制器;
7、摄像头用于采集包含菠萝的图像信息;
8、控制器用于根据图像信息获得菠萝的位置信息和成熟程度信息,并根据位置信息和成熟程度信息控制气泵和第一电磁阀工作,从而对采收绳形态进行调整,同时还能控制气泵和第二电磁阀工作,从而调整接收板的位置。
9、进一步,采收绳上均设有若干锯齿。
10、进一步,控制器还用于根据图像信息控制移动组件工作。
11、进一步,还包括通讯模块,控制器还能根据图像信息和采摘组件工作的次数控制通讯模块工作。
12、进一步,孔均倾斜布置。
13、进一步,移动组件包括高地隙底盘和驱动件,驱动件用于驱动高地隙底盘工作,高地隙底盘顶壁固定连接有固定架,固定架上滑动连接有机架,驱动腔和接收腔均开设与机架上,且接收篮和气泵均与机架固定连接,固定架上还固定连接有油缸,油缸用于驱动机架上下运动,控制器根据图像信息控制驱动件和油缸工作。
14、进一步,驱动腔与气泵的连通处均设有第三电磁阀,控制器根据图像信息控制第三电磁阀工作。
15、上述方案的技术原理及有益效果如下:
16、本设备中采摘组件的设计,通过气泵调整采收绳最低位置的高度,通过孔等使得采收绳形成绳套,套在菠萝根部,随后拉抻采收绳,在此过程中,采收绳收紧切割菠萝根部,同时带动菠萝向斜上方运动,从而使菠萝根部断裂,完成菠萝的采摘。本方案受菠萝种植位置影响较小,在面对生长位置并不规整的菠萝时,也能实现菠萝的精准采摘,且本设备结构简单,设备的操作难度和造价都相对降低。
17、本方案相较于现有技术中使用人工采摘辅助自走式采收车的方案,具有更低的人工参与率,大大降低菠萝采摘的人力成本。本方案相较于使用柔性滚筒进行非选择性采收的方案,本方案使用的采收绳能够更为精准地作用在菠萝根部,从而大幅度降低菠萝采摘过程中设备对菠萝植株的损伤。同时由于本方案不易受菠萝种植位置的影响,使得本方案能一次性进行多颗菠萝的采收,相较于现有技术中使用机械爪进行逐颗菠萝采收的方案,本方案具有更高的采收效率,能够适应大范围采收的使用情景。
18、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:1.一种用于菠萝采摘的智能识别设备,其特征在于:包括移动组件,移动组件上设有若干采摘组件和与采摘组件对应的接收组件,采摘组件均包括气泵、采收绳和对称布置的驱动腔,采收绳上设有配重块,采收绳两端均固定连接有活塞,且活塞均与相邻的驱动腔内侧壁滑动配合,任意一驱动腔靠近采收绳的侧边上开有孔,且孔布置于采收绳上方,该驱动腔通过孔与外界连通,且连通处设有第一电磁阀,气泵用于驱动活塞和接收组件工作,移动组件用于带动采摘组件和接收组件移动,接收组件用于接收采摘组件采摘的菠萝;
2.根据权利要求1所述的用于菠萝采摘的智能识别设备,其特征在于:接收组件均包括接收腔,接收腔内滑动配合有接收板,且接收腔均与气泵连通,连通处设有第二电磁阀,接收板下方设有接收篮,接收篮与移动组件固定连接,控制系统还用于控制第二电磁阀工作。
3.根据权利要求2所述的用于菠萝采摘的智能识别设备,其特征在于:接收板顶壁均固定连接有若干纤维环。
4.根据权利要求3所述的用于菠萝采摘的智能识别设备,其特征在于:控制系统包括摄像头和控制器;
5.根据权利要求4所述的用于菠萝采摘的智能识别设备,其特征在于:采收绳上均设有若干锯齿。
6.根据权利要求5所述的用于菠萝采摘的智能识别设备,其特征在于:控制器还根据图像信息控制移动组件工作。
7.根据权利要求6所述的用于菠萝采摘的智能识别设备,其特征在于:还包括通讯模块,控制器还根据图像信息和采摘组件工作的次数控制通讯模块工作。
8.根据权利要求7所述的用于菠萝采摘的智能识别设备,其特征在于:孔均倾斜布置。
9.根据权利要求8所述的用于菠萝采摘的智能识别设备,其特征在于:移动组件包括高地隙底盘和驱动件,驱动件用于驱动高地隙底盘工作,高地隙底盘顶壁固定连接有固定架,固定架上滑动连接有机架,驱动腔和接收腔均开设与机架上,且接收篮和气泵均与机架固定连接,固定架上还固定连接有油缸,油缸用于驱动机架上下运动,控制器根据图像信息控制驱动件和油缸工作。
10.根据权利要求9所述的用于菠萝采摘的智能识别设备,其特征在于:驱动腔与气泵的连通处均设有第三电磁阀,控制器根据图像信息控制第三电磁阀工作。
技术总结本发明公开了农业种植技术领域的一种用于菠萝采摘的智能识别设备,包括移动组件,移动组件上设有若干采摘组件和与采摘组件对应的接收组件,采摘组件均包括气泵、采收绳和对称布置的驱动腔,采收绳上设有配重块,采收绳两端均固定连接有活塞,且活塞均与相邻的驱动腔内侧壁滑动配合,任意一驱动腔靠近采收绳的侧边上开有孔,且孔布置于采收绳上方,该驱动腔通过孔与外界连通,且连通处设有第一电磁阀,还包括控制系统,控制系统用于根据菠萝的位置和成熟状态控制气泵和第一电磁阀工作,从而对采收绳形态进行调整,控制系统还用于控制接收组件工作,用以降低菠萝采摘过程中设备对菠萝植株的影响。技术研发人员:温翔宇,孟祥宝,莫志鹏,熊征,潘明,陈福展受保护的技术使用者:广东省现代农业装备研究所技术研发日:技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/300121.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表