一种变径式管道机器人
- 国知局
- 2024-09-19 15:00:17
本技术涉及管道机器人领域,更具体的说是涉及一种变径式管道机器人。
背景技术:
1、随着深海油气管道总里程的快速增长以及越来越多的管道步入老龄化阶段,深海油气管道存在严重的泄漏风险,深海管道泄漏不仅会影响油气正常输送,还会对海洋生态环境产生重大的威胁,并给国民经济造成难以估量的损失,因管道内难以通过人工去检查泄漏点等状况,因此,通过管道机器人对管道进行检查;
2、常规的管道机器人在管道内的进行过程中,其通过管道内的液体对管道机器人两端形成的压力不同,使得管道机器人两端的压强存在差值,依靠这个差值使得管道机器人行进,但管道机器人的行进速度难以控制。
技术实现思路
1、针对现有技术存在的不足,本实用新型的目的在于提供一种变径式管道机器人,用于更好的控制管道机器人的行进速度。
2、为实现上述目的,本实用新型提供了如下技术方案:一种变径式管道机器人,包括壳体,所述壳体的两端均设置有皮碗组件,所述皮碗组件包括内皮碗以及外皮碗,所述内皮碗包括第一环体以及多个第一形变体,所述第一形变体间隔设置,并且沿所述第一环体的中心轴线周向均匀分布,所述外皮碗包括第二环体以及多个第二形变体,所述第二形变体间隔设置,并且沿所述第二环体的中心轴线周向均匀分布,所述第一形变体与所述第二形变体错位设置,所述壳体内设置有控制器以及动力组件,所述控制器与所述动力组件电连接,所述动力组件用于带动其中一个所述内皮碗上的所述第一形变体收缩或展开,所述壳体上设置有位移传感器以及速度传感器。
3、作为本实用新型的进一步改进,所述第一形变体与所述第二形变体朝向同侧。
4、作为本实用新型的进一步改进,所述动力组件包括电机以及丝杠,所述电机的输出端与所述丝杠固定连接,所述丝杠与所述壳体之间转动连接,所述丝杠上螺纹连接有滑块,所述滑块上铰接有多个连接杆,所述壳体上铰接有多个支杆,所述支杆的端部与对应的所述第一形变体固定连接,所述连接杆与所述支杆铰接。
5、作为本实用新型的进一步改进,所述壳体上固定连接有套管,所述丝杠穿过所述套管,所述支杆背离所述第一形变体的一端与所述套管铰接。
6、作为本实用新型的进一步改进,所述电机的输出端与所述丝杠之间连接有轴套。
7、作为本实用新型的进一步改进,所述壳体上设置有多组限位组件,所述限位组件包括第一杆体、第二杆体以及第三杆体,所述第一杆体的一端与所述壳体铰接,所述第一杆体的另一端上转动连接有第一滚轮,所述第二杆体的一端与所述壳体铰接,所述第二杆体的另一端上转动连接有第二滚轮,所述第三杆体铰接于所述第一杆体与所述第二杆体之间,所述第一杆体与所述第二杆体平行设置,所述第二杆体或所述第一杆体与所述壳体之间设置有弹性组件,所述弹性组件用于支撑所述第二杆体或所述第一杆体。
8、作为本实用新型的进一步改进,所述弹性组件包括限位杆以及弹性件,所述第二杆体上开设有通孔,所述限位杆穿过所述通孔,所述限位杆的一端与所述壳体铰接,所述弹性件设置于所述限位杆与所述第二杆体之间。
9、作为本实用新型的进一步改进,所述弹性件为压缩弹簧,所述弹性件套设于所述限位杆上。
10、本实用新型的有益效果:本实用新型中通过两个外皮碗之间所受到的压力不同,形成了压力差,使得管道机器人能够在管道内行进,控制器通过位移变化以及速度变化来控制动力组件的动作,使得第一形变体收缩或展开,改变第一形变体与管道内壁之间的摩擦力,从而改变管道机器人的行进速度,通过限位组件增加了对壳体移动过程中的稳定性。
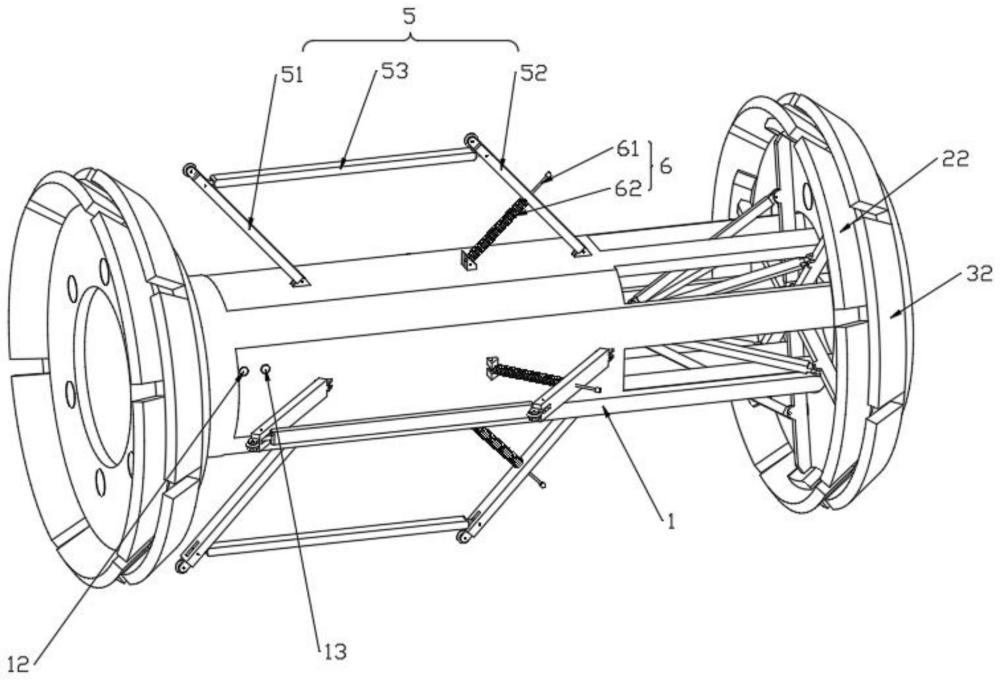
技术特征:1.一种变径式管道机器人,其特征在于:包括壳体(1),所述壳体(1)的两端均设置有皮碗组件,所述皮碗组件包括内皮碗(2)以及外皮碗(3),所述内皮碗(2)包括第一环体(21)以及多个第一形变体(22),所述第一形变体(22)间隔设置,并且沿所述第一环体(21)的中心轴线周向均匀分布,所述外皮碗(3)包括第二环体(31)以及多个第二形变体(32),所述第二形变体(32)间隔设置,并且沿所述第二环体(31)的中心轴线周向均匀分布,所述第一形变体(22)与所述第二形变体(32)错位设置,所述壳体(1)内设置有控制器(11)以及动力组件(4),所述控制器(11)与所述动力组件(4)电连接,所述动力组件(4)用于带动其中一个所述内皮碗(2)上的所述第一形变体(22)收缩或展开,所述壳体(1)上设置有位移传感器(12)以及速度传感器(13)。
2.根据权利要求1所述的一种变径式管道机器人,其特征在于:所述第一形变体(22)与所述第二形变体(32)朝向同侧。
3.根据权利要求1所述的一种变径式管道机器人,其特征在于:所述动力组件(4)包括电机(41)以及丝杠(42),所述电机(41)的输出端与所述丝杠(42)固定连接,所述丝杠(42)与所述壳体(1)之间转动连接,所述丝杠(42)上螺纹连接有滑块(43),所述滑块(43)上铰接有多个连接杆(44),所述壳体(1)上铰接有多个支杆(45),所述支杆(45)的端部与对应的所述第一形变体(22)固定连接,所述连接杆(44)与所述支杆(45)铰接。
4.根据权利要求3所述的一种变径式管道机器人,其特征在于:所述壳体(1)上固定连接有套管(46),所述丝杠(42)穿过所述套管(46),所述支杆(45)背离所述第一形变体(22)的一端与所述套管(46)铰接。
5.根据权利要求3所述的一种变径式管道机器人,其特征在于:所述电机(41)的输出端与所述丝杠(42)之间连接有轴套(47)。
6.根据权利要求1所述的一种变径式管道机器人,其特征在于:所述壳体(1)上设置有多组限位组件(5),所述限位组件(5)包括第一杆体(51)、第二杆体(52)以及第三杆体(53),所述第一杆体(51)的一端与所述壳体(1)铰接,所述第一杆体(51)的另一端上转动连接有第一滚轮(54),所述第二杆体(52)的一端与所述壳体(1)铰接,所述第二杆体(52)的另一端上转动连接有第二滚轮(55),所述第三杆体(53)铰接于所述第一杆体(51)与所述第二杆体(52)之间,所述第一杆体(51)与所述第二杆体(52)平行设置,所述第二杆体(52)或所述第一杆体(51)与所述壳体(1)之间设置有弹性组件(6),所述弹性组件(6)用于支撑所述第二杆体(52)或所述第一杆体(51)。
7.根据权利要求6所述的一种变径式管道机器人,其特征在于:所述弹性组件(6)包括限位杆(61)以及弹性件(62),所述第二杆体(52)上开设有通孔,所述限位杆(61)穿过所述通孔,所述限位杆(61)的一端与所述壳体(1)铰接,所述弹性件(62)设置于所述限位杆(61)与所述第二杆体(52)之间。
8.根据权利要求7所述的一种变径式管道机器人,其特征在于:所述弹性件(62)为压缩弹簧,所述弹性件(62)套设于所述限位杆(61)上。
技术总结本技术涉及管道机器人领域,公开了一种变径式管道机器人,其技术方案要点是包括通过两个外皮碗之间所受到的压力不同,形成了压力差,使得管道机器人能够在管道内行进,控制器通过位移变化以及速度变化来控制动力组件的动作,使得第一形变体收缩或展开,改变第一形变体与管道内壁之间的摩擦力,从而改变管道机器人的行进速度,通过限位组件增加了对壳体移动过程中的稳定性。技术研发人员:魏国强,张园园,杨淼帅,周园园,安亮,王琪,黄志龙,张子豪,张敦铭,孙振宇,宋婷婷,阮玉军受保护的技术使用者:江苏航运职业技术学院技术研发日:20240202技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/301433.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表