港口集装箱车用自动驾驶线控制动系统及港口集装箱车的制作方法
- 国知局
- 2024-09-23 15:07:13
本技术涉及港口集卡的自动刹车制动,特别是涉及港口集装箱车用自动驾驶线控制动系统及港口集装箱车。
背景技术:
1、为了提高运输效率,港口内采用了自动驾驶集装箱卡车、牵引车进行集装箱、货物等的运输。目前市场上大部分自动驾驶集装箱卡车装配的是wabco的ebs线控制动系统,工作时会出现ebs系统不执行制动刹车指令时或者失效的情况。为解决该问题,中国公开号为cn114701459a,名称为一种低速自动驾驶商用车的冗余制动系统和精准停车方法中。
2、但是现有的ebs系统主要是给有人驾驶车辆以及环境较为复杂的开放环境使用,为满足开放环境下各种突发情况的应对需求,ebs系统集成了多种庞大的功能,当需要刹车时,需要自动驾驶系统下发刹车值给ebs控制器,再通过ebs控制器控制刹车,导致ebs执行刹车时出现延迟,并且,由于ebs系统主要应用于有人驾驶的车辆上,其内有复杂的针对有人驾驶的算法,根据不同的外部环境和速度进行制动,这样每次进行制动时都会有不同时间的延时,导致无法准确控制刹车距离,使得自动驾驶集装箱卡车无法进行精准对位。
技术实现思路
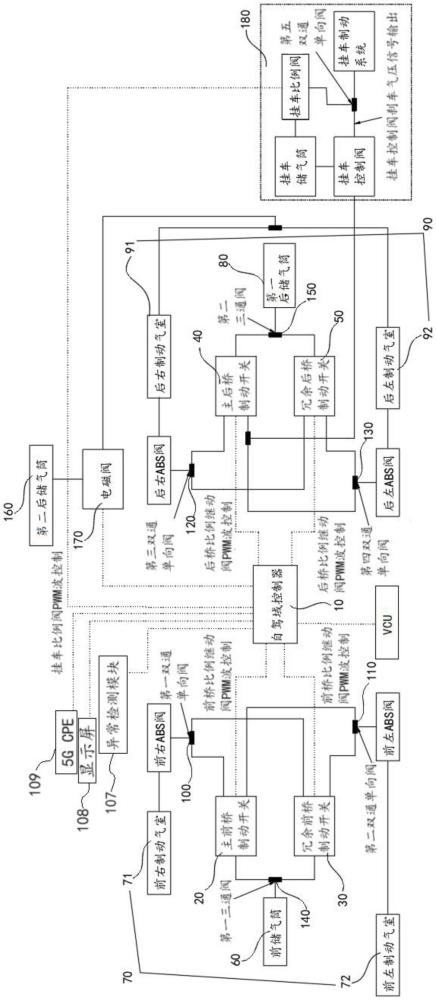
1、为解决上述技术问题,本实用新型提供港口集装箱车用自动驾驶线控制动系统及港口集装箱车,其中,港口集装箱车用自动驾驶线控制动系统,包括自驾域控制器、前储气筒、第一后储气筒、前右制动气室、前左制动气室、后右制动气室、后左制动气室;所述自驾域控制器分别电性连接有主前桥制动开关、冗余前桥制动开关、主后桥制动开关、冗余后桥制动开关和异常检测模块;
2、所述主前桥制动开关、冗余前桥制动开关分别连接于所述前储气筒与前右制动气室的制动气路,以及前储气筒与前左制动气室的制动气路中;
3、所述主后桥制动开关和冗余后桥制动开关分别连接于所述第一后储气筒与后右制动气室的制动气路,以及第一后储气筒与后左制动气室的制动气路中;
4、所述前左制动气室、前右制动气室、后左制动气室、后右制动气室均设有异常检测模块。
5、优选地,还包括第三制动装置;所述第三制动装置包括第二后储气筒和电磁阀;所述电磁阀与自驾域控制器电性连接;所述第二后储气筒通过电磁阀与后右制动气室、后左制动气室连接,和/或与前右制动气室、前左制动气室连接。
6、优选地,所述电磁阀为常闭电磁阀。
7、优选地,还包括若干双通单向阀和若干三通阀;所述主前桥制动开关、冗余前桥制动开关、主后桥制动开关和冗余后桥制动开关均设有两路出气口;
8、所述主前桥制动开关和冗余前桥制动开关的进气口通过第一三通阀与前储气筒连接;主后桥制动开关、冗余后桥制动开关的进气口通过第二三通阀与第一后储气筒连接;
9、前右制动气室通过第一双通单向阀分别与主前桥制动开关一出气口、冗余前桥制动开关一出气口连接;前左制动气室通过第二双通单向阀分别与主前桥制动开关另一出气口、冗余前桥制动开关另一出气口连接;
10、后右制动气室通过第三双通单向阀分别与主后桥制动开关一出气口、冗余后桥制动开关一出气口连接;后左制动气室通过第四双通单向阀分别与主后桥制动开关另一出气口、冗余后桥制动开关另一出气口连接。
11、优选地,所述前右制动气室、前左制动气室、后右制动气室、后左制动气室与其连接的双通单向阀之间均设有abs阀。
12、优选地,所述主后桥制动开关与其连接的abs阀之间,或冗余后桥制动开关与其连接的abs阀之间设有挂车制动装置;所述挂车制动装置与自驾域控制器连接。
13、优选地,主前桥制动开关、冗余前桥制动开关、主后桥制动开关和冗余后桥制动开关为比例继动阀。
14、优选地,所述自驾域控制器设有第一控制模块和第二控制模块;所述第一控制模块与所述主前桥制动开关、主后桥制动开关连接;所述第二控制模块与所述冗余前桥制动开关、冗余后桥制动开关连接。
15、优选地,所述自驾域控制器还包括控制模块失效开关模块;所述控制模块失效开关模块一端分别与第一控制模块、第二控制模块连接,另一端与主前桥制动开关、冗余前桥制动开关、主后桥制动开关、冗余后桥制动开关中的至少一个连接。
16、本实用新型提供的基于港口封闭区域的自动驾驶制动系统,减少了制动流程,缩短了刹车制动的反应时间;同时,通过自驾域控制器直接控制的各个制动开关,能够更加精准地控制刹车距离,从而使得自动驾驶集装箱卡车能够实现精准停车或精准对位。
17、本实用新型还提供港口集装箱车,采用如上任意所述的港口集装箱车用自动驾驶线控制动系统,能够实现平稳、精准刹车。
技术特征:1.港口集装箱车用自动驾驶线控制动系统,其特征在于:包括自驾域控制器(10)、前储气筒(60)、第一后储气筒(80)、前右制动气室(71)、前左制动气室(72)、后右制动气室(91)、后左制动气室(92);所述自驾域控制器(10)分别电性连接有主前桥制动开关(20)、冗余前桥制动开关(30)、主后桥制动开关(40)、冗余后桥制动开关(50)和异常检测模块(107);
2.根据权利要求1所述的港口集装箱车用自动驾驶线控制动系统,其特征在于:还包括第三制动装置;所述第三制动装置包括第二后储气筒(160)和电磁阀(170);所述电磁阀(170)与自驾域控制器(10)电性连接;所述第二后储气筒(160)通过电磁阀(170)与后右制动气室(91)、后左制动气室(92)连接,和/或与前右制动气室(71)、前左制动气室(72)连接。
3.根据权利要求2所述的港口集装箱车用自动驾驶线控制动系统,其特征在于:所述电磁阀(170)为常闭电磁阀。
4.根据权利要求1-3任一项所述的港口集装箱车用自动驾驶线控制动系统,其特征在于:还包括若干双通单向阀和若干三通阀;所述主前桥制动开关(20)、冗余前桥制动开关(30)、主后桥制动开关(40)和冗余后桥制动开关(50)均设有两路出气口;
5.根据权利要求4所述的港口集装箱车用自动驾驶线控制动系统,其特征在于:所述前右制动气室(71)、前左制动气室(72)、后右制动气室(91)、后左制动气室(92)与其连接的双通单向阀之间均设有abs阀。
6.根据权利要求5所述的港口集装箱车用自动驾驶线控制动系统,其特征在于:所述主后桥制动开关(40)与其连接的abs阀之间,或冗余后桥制动开关(50)与其连接的abs阀之间设有挂车制动装置(180);所述挂车制动装置(180)与自驾域控制器(10)连接。
7.根据权利要求1所述的港口集装箱车用自动驾驶线控制动系统,其特征在于:主前桥制动开关(20)、冗余前桥制动开关(30)、主后桥制动开关(40)和冗余后桥制动开关(50)为比例继动阀。
8.根据权利要求1所述的港口集装箱车用自动驾驶线控制动系统,其特征在于:所述自驾域控制器(10)设有第一控制模块(102)和第二控制模块(103);所述第一控制模块(102)与所述主前桥制动开关(20)、主后桥制动开关(40)连接;所述第二控制模块(103)与所述冗余前桥制动开关(30)、冗余后桥制动开关(50)连接。
9.根据权利要求8所述的港口集装箱车用自动驾驶线控制动系统,其特征在于:所述自驾域控制器(10)还包括控制模块失效开关模块(105);所述控制模块失效开关模块(105)一端分别与第一控制模块(102)、第二控制模块(103)连接,另一端与主前桥制动开关(20)、冗余前桥制动开关(30)、主后桥制动开关(40)、冗余后桥制动开关(50)中的至少一个连接。
10.港口集装箱车,其特征在于:采用如权利要求1-9任一项所述的港口集装箱车用自动驾驶线控制动系统。
技术总结本技术公开了港口集装箱车用自动驾驶线控制动系统及港口集装箱车,其中,港口集装箱车用自动驾驶线控制动系统,包括自驾域控制器、前储气筒、第一后储气筒、前右制动气室、前左制动气室、后右制动气室、后左制动气室;自驾域控制器分别电性连接有主前桥制动开关、冗余前桥制动开关、主后桥制动开关、冗余后桥制动开关和异常检测模块。本技术提供的基于港口封闭区域的自动驾驶制动系统,通过自驾域控制器线性控制各个制动开关,减少了制动流程,缩短了刹车制动的反应时间,能够更加精准地控制刹车距离,从而使得自动驾驶集装箱卡车能够实现精准停车或精准对位。技术研发人员:林文畅,侯学锋,谢为辉,肖劲韬,刘平,黄良彬,严文裕,方守勇,郭盛晓受保护的技术使用者:厦门中科星晨科技有限公司技术研发日:20240318技术公布日:2024/9/19本文地址:https://www.jishuxx.com/zhuanli/20240923/305627.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种车载激光雷达支架
下一篇
返回列表