基于多线激光雷达的港口AGV物料架识别与定位方法及系统与流程
- 国知局
- 2024-09-05 14:54:24
本发明涉及一种数据处理,特别涉及一种适用于agv自动应用场景的用于识别与定位的方法及系统。
背景技术:
1、本发明涉及agv导航领域,具体涉及一种用于定位物料架位置,引导agv驶入物料架,并最终停止在指定位置的视觉导航系统。该视觉导航系统主要由物料架、多线激光雷达、超声波雷达以及计算单元组成。该视觉导航系统在不同的阶段提供不同形式的引导:agv在物料架外时,通过多线激光雷达提供准确的物料架入口位置和朝向;agv在物料架下方时,通过多线激光雷达提供准确的物料架导引条的位置和朝向;最后,通过超声波雷达来判定agv是否应停止。
2、当前已广泛使用一种通过线性霍尔磁传感器获取地面磁条方向的方法来实现精确导航,让agv能准确进入货物下方;或者,采用槽轨等辅助对准的方式来实现精确停车。例如《一种基于agv的智能管纱运输装置、系统及运输方法》(cn114620433a)设计了一种运输方法,包括agv在运行时通过线性霍尔磁传感器获取地面磁条的方向信号,通过rfid传感器获取位置及站点信息,在rfid模块获知到达站点后,从管纱车后方潜入管纱车底部,当线性霍尔磁传感器识别到横向定位磁条时停车,牵引升降牵引轴上升,钻入牵引头内,随即牵引管纱车在槽轨上行驶。该专利采用磁条来引导agv行驶,通过横向定位磁条来判定是否停车,管纱车由槽轨限定了横向位置,该技术方案要求待运输的管纱车必须位于站点处,并只能位于横向定位磁条处的槽轨上。该方案不适用于货物摆放灵活的场景。
技术实现思路
1、本发明专利的目的是引导agv进入物料架,并停止在指定位置。其具体技术方案如下:
2、作为第一方面,本发明提供了一种基于多线激光雷达的港口agv物料架识别与定位的方法,所述方法的步骤如下:
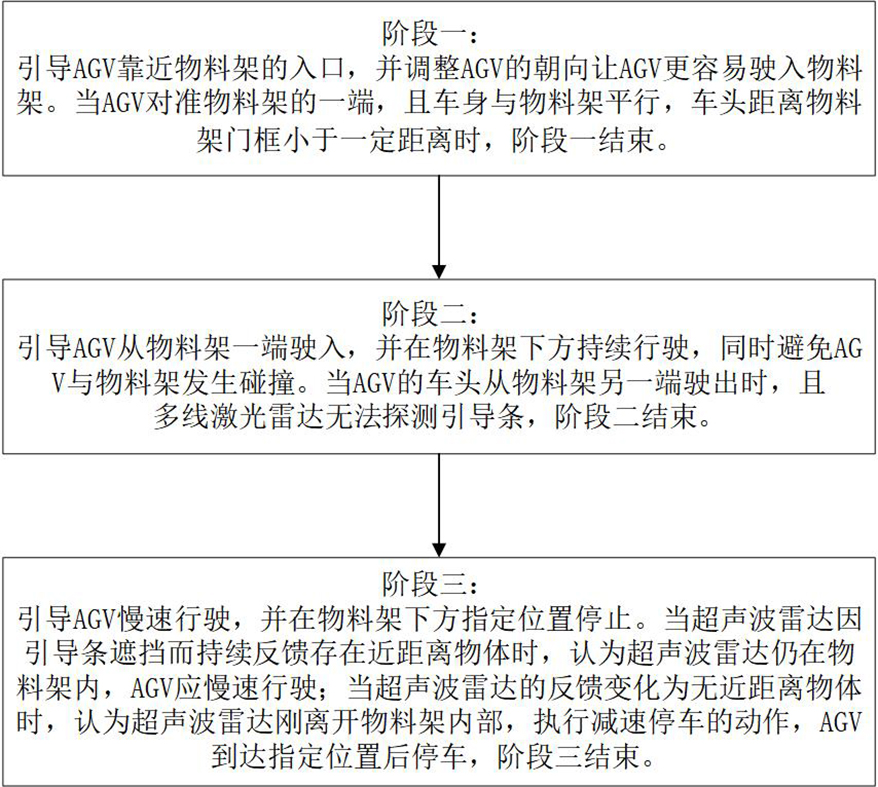
3、步骤1:获取点云数据并计算输出物料架门框在车辆坐标系xy平面的坐标,以及门框的朝向,据此输出引导agv靠近物料架的入口,并调整agv与物料架的相对姿态,引导agv车头行驶至距离物料架门框小于预设距离时结束;
4、步骤2:获取点云数据并计算输出物料架两侧引导装置两个端点在车辆坐标系xy平面的坐标,据此输出引导agv从物料架一端驶入,并在物料架下方持续行驶,同时避免agv与物料架发生碰撞,当agv从物料架另一端驶出且多线激光雷达无法探测到物料架两侧的反光引导装置时结束。
5、步骤3:根据物体探测器实时获取的探测数据判断其是否被引导装置遮挡,若探测数据在预设的阈值范围内时,则判定为是,引导agv慢速行驶;若探测数据超出预设的阈值范围时,则判定为否,引导agv减速直至到达指定位置后停车。
6、在所有可选的方式中进一步优选为,所述步骤1包括如下步骤:
7、步骤1的输入数据是激光雷达获取的点云数据,每个点至少包含4个参数,分别是该点在点云坐标系中的坐标,以及该点所归属的激光雷达的线号ring,步骤1的输出数据是物料架门框在车辆坐标系xy平面的坐标,以及门框的朝向;其中:
8、1.1:将激光点云数据转换为m行n列的3通道矩阵数据的深度图,m是多线激光雷达的总线数,n是多线激光雷达的最大水平扫描角除以水平扫描间隔的商,保留深度图中目标区域,裁剪其他区域;
9、1.2:逐行逐列遍历深度图,当空值像素左右最近像素的range值在预设的阈值范围内时,采用线性插值填补空值像素的range、和;否则,采用最近邻插值填补空值像素的range、和;
10、1.3:逐行逐列遍历深度图,若当前像素与上下相邻像素的range值相差超出预设的阈值范围时,将当前像素赋为空值;否则保留当前像素;
11、1.4:提取深度图中离agv最近的一对立柱的点云数据;
12、1.5:上一步得到的像素片段对的集合中,包含多个像素片段对,每个像素片段对包含左、右两个像素片段,左侧像素片段的最后一个像素对应门框左侧立柱的右边缘,右侧像素片段的第一个像素对应门框右侧立柱的左边缘;取所有左侧像素片段的最后一个像素的点云坐标的均值,作为门框左侧立柱的位置,取所有右侧像素片段的第一个像素的点云坐标的均值作为门框右侧立柱的位置;门框的位置坐标即左、右立柱位置坐标的均值;门框的朝向与两根立柱位置坐标的连线垂直,朝向物料架内部;根据已标定的激光雷达坐标系与车辆坐标系的相对位置关系,将当前计算得到的门框的位置坐标和朝向角,转换为车辆坐标系下门框的位置坐标和朝向角。
13、在所有可选的方式中进一步优选为,所述步骤1.1包括如下步骤:
14、1.1.1)将深度图的每个像素设为空值,定义深度图中第一个通道的数值-999999代表空值;
15、1.1.2)逐个遍历点云数据,根据该点的坐标计算朝向,再用除以水平扫描间隔,得到该点在深度图中的列号n;根据该点的坐标计算该点到坐标系原点的距离range;将距离range和点云坐标按顺序赋值给深度图第m行第n列的3个通道;
16、1.1.3)只保留深度图中目标区域,裁剪其他区域。
17、在所有可选的方式中进一步优选为,所述步骤1.4包括如下步骤:
18、1.4.1)针对每一行深度图,逐列遍历,将连续非空值像素绑定为一个像素片段,根据该像素片段的首尾像素的两个点云坐标,计算该像素片段的宽度,只保留其中宽度在预设的门框的立柱宽度阈值范围内的像素片段,将其作为单个立柱的候选位置;
19、1.4.2)针对每一行搜索到的像素片段,将该行的像素片段两两组合,并遍历所有的可能组合,根据组合中左侧像素片段的最后一个像素的点云坐标,与右侧像素片段的第一个像素的点云坐标,计算两个像素片段之间的距离,只保留其中距离在预设的门框的立柱之间间距阈值范围内的像素片段对;
20、1.4.3)针对每行的每个像素片段对,若某个像素片段对在相邻行没有相距距离在预设阈值范围内的像素片段对,那么该像素片段对被剔除,将剩余的彼此相邻且能贯穿多行的像素片段对组合为多个像素片段对集合,且每个像素片段对包含左、右两个像素片段;
21、1.4.4)针对上述的多个像素片段对集合,根据每个集合中每个像素的点云坐标,计算某个集合到原点的平均距离,只保留距离在预设阈值范围内的集合(此处优先选取保留平均距离最小的集合),作为从深度图中搜索到的离agv最近的一对立柱的点云数据。
22、在所有可选的方式中进一步优选为,所述步骤2包括如下步骤:
23、步骤2的输入数据是激光雷达获取的点云数据,每个点至少包含该点在点云坐标系中的坐标,步骤2的输出数据是物料架两侧引导装置两个端点在车辆坐标系xy平面的坐标;其中:
24、2.1:将多线激光雷达的点云数据转换为车头左前方和右前方的单线点云数据;
25、2.2:预先在点云坐标系的xy平面确定两个区域范围,分别从左前方和右前方的单线点云数据中提取对应左、右侧引导装置点云数据,从而计算左、右侧引导装置的端点坐标。
26、在所有可选的方式中进一步优选为,所述步骤2.1包括如下步骤:
27、2.1.1)根据物料架引导装置上边缘和下边缘的高度,在点云坐标系z轴上确定一个预设高度范围,逐个遍历点云,剔除不在该高度范围的点,再根据被保留点的点云坐标计算该点朝向;
28、2.1.2)逐个遍历点云,根据该点朝向,将保留的点云分别按和,划分为左前方点云和右前方点云;
29、2.1.3)分别针对左前方点云和后前方点云,将点云按照的数值由小到大排列,得到单线点云数据,排列后,若相邻两个或多个点的相差在预设的阈值范围内,则剔除这些点,计算这些点的平均点云坐标和朝向,加入到单线点云中,保持的数值由小到大排列。
30、在所有可选的方式中进一步优选为,所述步骤2.2包括如下步骤:
31、2.2.1)预先在点云坐标系的xy平面确定两个区域范围,分别针对左、右两侧的单线点云,逐个遍历点云,剔除不在该区域范围内的点;
32、2.2.2)针对左、右两侧的单线,根据点云坐标,分别拟合一条直线,称为第一拟合直线;
33、2.2.3)分别计算点云与左、右两侧第一拟合直线的距离,剔除距离超出预设阈值范围的点,被保留点作为引导装置的点云数据;
34、2.2.4)针对左、右两侧的单线点云,根据点云坐标,分别再次拟合一条直线,称为第二拟合直线;分别取左、右两侧的单线点云中的第一个和最后一个点,计算它们在第二拟合直线上的垂足,垂足坐标就是引导装置两端点的坐标。
35、作为第二方面,本发明提供了一种基于多线激光雷达的港口agv物料架识别与定位系统,所述系统包括物料架、agv、激光雷达模块、物体探测模块、计算与存储模块,其中:
36、物料架,用于承载货物,其底部贯通以供agv在其下发穿行,物料架的两端设有反光门框及底部两内侧设有反光引导装置;
37、agv,用于根据计算与存储模块的指令对物料架进行顶升和降下,并将物料架搬运至指定位置;
38、激光雷达模块,用于识别物料架上的门框和引导装置,确定门框和引导装置在车辆坐标系中的位置和朝向;
39、物体探测模块,用于判定agv是否行驶至物料架下方指定位置;
40、计算与存储模块,用于执行上述任意一项所述的一种基于多线激光雷达的港口agv物料架识别与定位方法;
41、计算与存储模块与所述激光雷达模块、物体探测模块及agv进行数据通信连接。
42、在所有可选的方式中进一步优选为,激光雷达模块为多线激光雷达,安装在agv的头部;物体探测模块为超声波雷达或激光测距仪,安装在agv的左侧或者右侧。
43、作为第三方面,本发明提供了一种数据处理装置,所述数据处理装置包括中央处理器、可读存储器、数据总线,所述中央处理器同所述可读存储器通过数据总线进行数据连接,所述中央处理器根据操作指令对可读存储器进行控制,从而执行上述任意一项所述的一种基于多线激光雷达的港口agv物料架识别与定位方法。
44、本发明的有益效果是:能自动引导agv进入物料架下方,并且自动识别进入过程中的目标部件和其余障碍物,保证agv行进过程中避免与物料架发生碰撞。通过本发明,摆脱了现有技术中对物料架放置的苛刻要求,能够使物料架的摆放更灵活,agv可以自动适配各种物料架的姿态、角度,从而使agv能够适用于更多场景。
本文地址:https://www.jishuxx.com/zhuanli/20240905/288781.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种码头吊机抓斗防漏装置
下一篇
返回列表