磁轴承系统及其控制方法、装置、存储介质和程序产品与流程
- 国知局
- 2024-10-09 15:45:05
本发明属于磁悬浮,具体涉及一种磁轴承系统的控制方法、装置、磁轴承系统、存储介质和计算机程序产品,尤其涉及一种磁轴承系统的改进型的交叉反馈控制方法、装置、磁轴承系统、存储介质和计算机程序产品。
背景技术:
1、在旋转机械领域,磁轴承系统(即磁悬浮轴承-转子系统),因其与传统轴承-转子系统相比具有无摩擦、能耗低等多项优点而备受关注。
2、旋转机械区别于其他振动系统的重要特征之一就是转子的陀螺耦合效应。对于磁悬浮轴承-转子系统具有磁轴承转子和磁轴承定子,当磁轴承转子的极转动惯量与赤道转动惯量之间的比值较大时,磁轴承转子高速旋转时会表现出强烈的陀螺耦合效应;磁轴承转子的陀螺耦合效应的存在使磁悬浮轴承-转子系统各自由度之间的耦合加强,强陀螺耦合效应作用下磁轴承转子各模态可能会失稳,要实现磁悬浮轴承-转子系统的稳定悬浮及高速运行极其困难。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的目的在于,提供一种磁轴承系统的控制方法、装置、磁轴承系统、存储介质和计算机程序产品,以解决对磁轴承系统而言,在磁轴承转子高速旋转时会表现出强烈的陀螺耦合效应,使磁轴承转子难以稳定悬浮及高速运行的问题,达到通过提取磁轴承转子的径向每一端每个方向的异步分量(如异步位移信号)进行计算后反馈至另一端的另一个方向的控制回路中,抵消磁轴承转子的陀螺耦合效应,使磁轴承转子稳定悬浮且高速运行的效果。
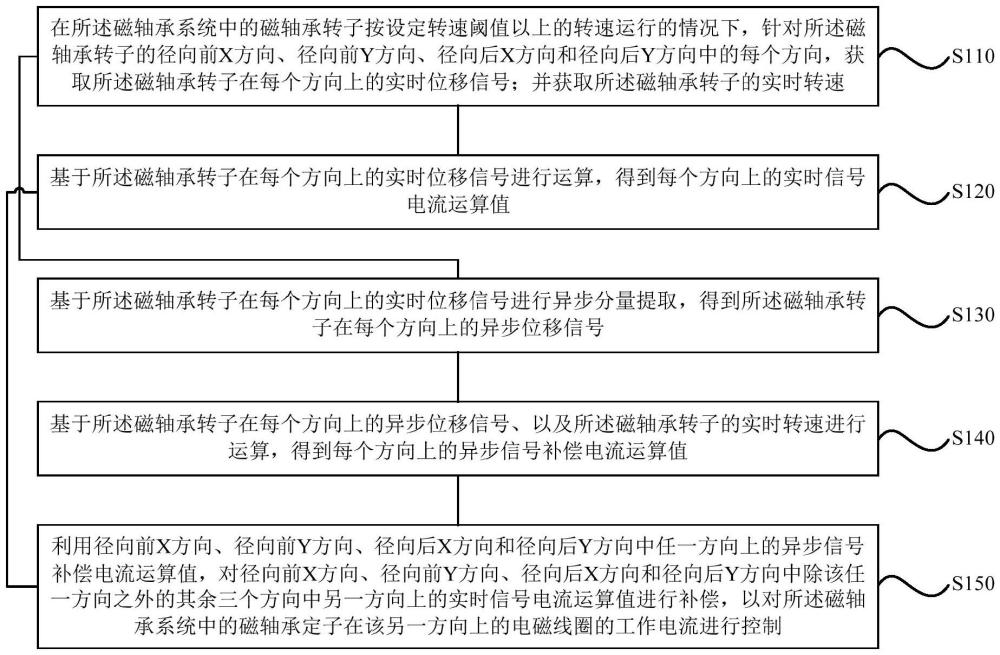
2、本发明提供一种磁轴承系统的控制方法,所述磁轴承系统,具有前径向轴承和后径向轴承;所述磁轴承系统的前径向轴承和后径向轴承中每个径向轴承的方法,包括:在所述磁轴承系统中的磁轴承转子按设定转速阈值以上的转速运行的情况下,针对所述磁轴承转子的径向前x方向、径向前y方向、径向后x方向和径向后y方向中的每个方向,获取所述磁轴承转子在每个方向上的实时位移信号;并获取所述磁轴承转子的实时转速;基于所述磁轴承转子在每个方向上的实时位移信号进行运算,得到每个方向上的实时信号电流运算值;基于所述磁轴承转子在每个方向上的实时位移信号进行异步分量提取,得到所述磁轴承转子在每个方向上的异步位移信号;基于所述磁轴承转子在每个方向上的异步位移信号、以及所述磁轴承转子的实时转速进行运算,得到每个方向上的异步信号补偿电流运算值;利用径向前x方向、径向前y方向、径向后x方向和径向后y方向中任一方向上的异步信号补偿电流运算值,对径向前x方向、径向前y方向、径向后x方向和径向后y方向中除该任一方向之外的其余三个方向中另一方向上的实时信号电流运算值进行补偿,以对所述磁轴承系统中的磁轴承定子在该另一方向上的电磁线圈的工作电流进行控制。
3、在一些实施方式中,其中,基于所述磁轴承转子在每个方向上的实时位移信号进行运算,得到每个方向上的实时信号电流运算值,包括:将所述磁轴承转子在每个方向上的实时位移信号进行ad转换后,再进行pid运算,得到每个方向上的pid运算值,作为每个方向上的实时信号电流运算值;和/或,基于所述磁轴承转子在每个方向上的实时位移信号进行异步分量提取,得到所述磁轴承转子在每个方向上的异步位移信号,包括:自所述磁轴承转子在每个方向上的实时位移信号中分离出同步分量位移信号,得到所述磁轴承转子在每个方向上的同步分量位移信号;将所述磁轴承转子在每个方向上的实时位移信号与所述磁轴承转子在每个方向上的同步分量位移信号的差值,作为所述磁轴承转子在每个方向上的异步位移信号。
4、在一些实施方式中,自所述磁轴承转子在每个方向上的实时位移信号中分离出同步分量位移信号,得到所述磁轴承转子在每个方向上的同步分量位移信号,包括:基于所述磁轴承转子在每个方向上的实时位移信号,按以下公式,计算得到所述磁轴承转子在每个方向上的同步分量位移信号:
5、xa(k)=(1-α)xa(k-1)+xa(k);
6、其中,α为常数;k表示设定的检测周期中的当前时刻,k-1表示上一时刻,xa(k)为当前时刻k的同步分量位移信号,xa(k-1)为上一时刻k-1的同步分量位移信号。
7、在一些实施方式中,基于所述磁轴承转子在每个方向上的异步位移信号、以及所述磁轴承转子的实时转速进行运算,得到每个方向上的异步信号补偿电流运算值,包括:基于所述磁轴承转子在每个方向上的异步位移信号,进行pd运算,得到每个方向上的异步位移信号pd运算值;将预设的陀螺耦合效应反馈增益系数、所述磁轴承转子的实时转速、以及每个方向上的异步位移信号pd运算值的乘积值,作为每个方向上的异步信号补偿电流运算值。
8、在一些实施方式中,所述磁轴承系统的前径向轴承和后径向轴承中每个径向轴承的控制回路,包括:径向前x方向的电磁线圈的电流差动控制回路,记为第一控制回路;径向前y方向的电磁线圈的电流差动控制回路,记为第二控制回路;径向后x方向的电磁线圈的电流差动控制回路,记为第三控制回路;径向后y方向的电磁线圈的电流差动控制回路,记为第四控制回路;利用径向前x方向、径向前y方向、径向后x方向和径向后y方向中任一方向上的异步信号补偿电流运算值,对径向前x方向、径向前y方向、径向后x方向和径向后y方向中除该任一方向之外的其余三个方向中另一方向上的实时信号电流运算值进行补偿,以对所述磁轴承系统中的磁轴承定子在该另一方向上的电磁线圈的工作电流进行控制,包括:针对所述第一控制回路、所述第二控制回路、所述第三控制回路和所述第四控制回路中任一当前控制回路,利用所述任一当前控制回路所在方向上的异步信号补偿电流运算值,对其余三个控制回路中的一个目标控制回路所在方向上的实时信号电流运算值进行补偿,得到所述一个目标控制回路所在方向上的最终电流参考值;根据所述一个目标控制回路所在方向上的最终电流参考值,对所述一个目标控制回路所在方向上的电磁线圈的工作电流进行控制。
9、在一些实施方式中,利用所述任一当前控制回路所在方向上的异步信号补偿电流运算值,对其余三个控制回路中的一个目标控制回路所在方向上的实时信号电流运算值进行补偿,得到所述一个目标控制回路所在方向上的最终电流参考值,包括:在所述任一当前控制回路为所述第一控制回路的情况下,以所述第四控制回路为所述一个目标控制回路,即:利用所述第一控制回路所在方向上的异步信号补偿电流运算值,对所述第四控制回路所在方向上的实时信号电流运算值进行补偿,得到所述第四控制回路所在方向上的最终电流参考值;在所述任一当前控制回路为所述第二控制回路的情况下,以所述第三控制回路为所述一个目标控制回路,即:利用所述第二控制回路所在方向上的异步信号补偿电流运算值,对所述第三控制回路所在方向上的实时信号电流运算值进行补偿,得到所述第三控制回路所在方向上的最终电流参考值;在所述任一当前控制回路为所述第三控制回路的情况下,以所述第二控制回路为所述一个目标控制回路,即:利用所述第三控制回路所在方向上的异步信号补偿电流运算值,对所述第二控制回路所在方向上的实时信号电流运算值进行补偿,得到所述第二控制回路所在方向上的最终电流参考值;在所述任一当前控制回路为所述第四控制回路的情况下,以所述第一控制回路为所述一个目标控制回路,即:利用所述第四控制回路所在方向上的异步信号补偿电流运算值,对所述第一控制回路所在方向上的实时信号电流运算值进行补偿,得到所述第一控制回路所在方向上的最终电流参考值。
10、与上述方法相匹配,本发明另一方面提供一种磁轴承系统的控制装置,所述磁轴承系统,具有前径向轴承和后径向轴承;所述磁轴承系统的前径向轴承和后径向轴承中每个径向轴承的装置,包括:获取单元,被配置为在所述磁轴承系统中的磁轴承转子按设定转速阈值以上的转速运行的情况下,针对所述磁轴承转子的径向前x方向、径向前y方向、径向后x方向和径向后y方向中的每个方向,获取所述磁轴承转子在每个方向上的实时位移信号;并获取所述磁轴承转子的实时转速;控制单元,被配置为基于所述磁轴承转子在每个方向上的实时位移信号进行运算,得到每个方向上的实时信号电流运算值;所述控制单元,还被配置为基于所述磁轴承转子在每个方向上的实时位移信号进行异步分量提取,得到所述磁轴承转子在每个方向上的异步位移信号;所述控制单元,还被配置为基于所述磁轴承转子在每个方向上的异步位移信号、以及所述磁轴承转子的实时转速进行运算,得到每个方向上的异步信号补偿电流运算值;所述控制单元,还被配置为利用径向前x方向、径向前y方向、径向后x方向和径向后y方向中任一方向上的异步信号补偿电流运算值,对径向前x方向、径向前y方向、径向后x方向和径向后y方向中除该任一方向之外的其余三个方向中另一方向上的实时信号电流运算值进行补偿,以对所述磁轴承系统中的磁轴承定子在该另一方向上的电磁线圈的工作电流进行控制。
11、在一些实施方式中,其中,所述控制单元,基于所述磁轴承转子在每个方向上的实时位移信号进行运算,得到每个方向上的实时信号电流运算值,包括:将所述磁轴承转子在每个方向上的实时位移信号进行ad转换后,再进行pid运算,得到每个方向上的pid运算值,作为每个方向上的实时信号电流运算值;和/或,所述控制单元,基于所述磁轴承转子在每个方向上的实时位移信号进行异步分量提取,得到所述磁轴承转子在每个方向上的异步位移信号,包括:自所述磁轴承转子在每个方向上的实时位移信号中分离出同步分量位移信号,得到所述磁轴承转子在每个方向上的同步分量位移信号;将所述磁轴承转子在每个方向上的实时位移信号与所述磁轴承转子在每个方向上的同步分量位移信号的差值,作为所述磁轴承转子在每个方向上的异步位移信号。
12、在一些实施方式中,所述控制单元,自所述磁轴承转子在每个方向上的实时位移信号中分离出同步分量位移信号,得到所述磁轴承转子在每个方向上的同步分量位移信号,包括:基于所述磁轴承转子在每个方向上的实时位移信号,按以下公式,计算得到所述磁轴承转子在每个方向上的同步分量位移信号:
13、xa(k)=(1-α)xa(k-1)+xa(k);
14、其中,α为常数;k表示设定的检测周期中的当前时刻,k-1表示上一时刻,xa(k)为当前时刻k的同步分量位移信号,xa(k-1)为上一时刻k-1的同步分量位移信号。
15、在一些实施方式中,所述控制单元,基于所述磁轴承转子在每个方向上的异步位移信号、以及所述磁轴承转子的实时转速进行运算,得到每个方向上的异步信号补偿电流运算值,包括:基于所述磁轴承转子在每个方向上的异步位移信号,进行pd运算,得到每个方向上的异步位移信号pd运算值;将预设的陀螺耦合效应反馈增益系数、所述磁轴承转子的实时转速、以及每个方向上的异步位移信号pd运算值的乘积值,作为每个方向上的异步信号补偿电流运算值。
16、在一些实施方式中,所述磁轴承系统的前径向轴承和后径向轴承中每个径向轴承的控制回路,包括:径向前x方向的电磁线圈的电流差动控制回路,记为第一控制回路;径向前y方向的电磁线圈的电流差动控制回路,记为第二控制回路;径向后x方向的电磁线圈的电流差动控制回路,记为第三控制回路;径向后y方向的电磁线圈的电流差动控制回路,记为第四控制回路;所述控制单元,利用径向前x方向、径向前y方向、径向后x方向和径向后y方向中任一方向上的异步信号补偿电流运算值,对径向前x方向、径向前y方向、径向后x方向和径向后y方向中除该任一方向之外的其余三个方向中另一方向上的实时信号电流运算值进行补偿,以对所述磁轴承系统中的磁轴承定子在该另一方向上的电磁线圈的工作电流进行控制,包括:针对所述第一控制回路、所述第二控制回路、所述第三控制回路和所述第四控制回路中任一当前控制回路,利用所述任一当前控制回路所在方向上的异步信号补偿电流运算值,对其余三个控制回路中的一个目标控制回路所在方向上的实时信号电流运算值进行补偿,得到所述一个目标控制回路所在方向上的最终电流参考值;根据所述一个目标控制回路所在方向上的最终电流参考值,对所述一个目标控制回路所在方向上的电磁线圈的工作电流进行控制。
17、在一些实施方式中,所述控制单元,利用所述任一当前控制回路所在方向上的异步信号补偿电流运算值,对其余三个控制回路中的一个目标控制回路所在方向上的实时信号电流运算值进行补偿,得到所述一个目标控制回路所在方向上的最终电流参考值,包括:在所述任一当前控制回路为所述第一控制回路的情况下,以所述第四控制回路为所述一个目标控制回路,即:利用所述第一控制回路所在方向上的异步信号补偿电流运算值,对所述第四控制回路所在方向上的实时信号电流运算值进行补偿,得到所述第四控制回路所在方向上的最终电流参考值;在所述任一当前控制回路为所述第二控制回路的情况下,以所述第三控制回路为所述一个目标控制回路,即:利用所述第二控制回路所在方向上的异步信号补偿电流运算值,对所述第三控制回路所在方向上的实时信号电流运算值进行补偿,得到所述第三控制回路所在方向上的最终电流参考值;在所述任一当前控制回路为所述第三控制回路的情况下,以所述第二控制回路为所述一个目标控制回路,即:利用所述第三控制回路所在方向上的异步信号补偿电流运算值,对所述第二控制回路所在方向上的实时信号电流运算值进行补偿,得到所述第二控制回路所在方向上的最终电流参考值;在所述任一当前控制回路为所述第四控制回路的情况下,以所述第一控制回路为所述一个目标控制回路,即:利用所述第四控制回路所在方向上的异步信号补偿电流运算值,对所述第一控制回路所在方向上的实时信号电流运算值进行补偿,得到所述第一控制回路所在方向上的最终电流参考值。
18、与上述装置相匹配,本发明再一方面提供一种磁轴承系统,包括:以上所述的磁轴承系统的控制装置。
19、与上述磁轴承系统相匹配,本发明再一方面提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以上所述的磁轴承系统的控制方法的步骤。
20、与上述方法相匹配,本发明再一方面提供一种存储介质,所述存储介质包括存储的程序,其中,在所述程序运行时控制所述存储介质所在设备执行以上所述的磁轴承系统的控制方法的步骤。
21、由此,本发明的方案,通过针对磁轴承径向控制的不同方向(如磁轴承径向控制的四路控制通道所对应的方向即径向前x方向、径向前y方向、径向后x方向、径向后y方向)中的每个方向,检测磁轴承转子的高速运行下的位移信号即实时位移信号,自磁轴承转子的实时位移信号中分离出与磁轴承转子的转速同步的位移信号得到磁轴承转子的同步位移信号,将磁轴承转子的实时位移信号与磁轴承转子的同步位移信号做差得到磁轴承转子的异步位移信号,将磁轴承转子的异步位移信号作为磁轴承转子的交叉反馈误差;将磁轴承转子的交叉反馈误差进行比例微分运算,得到磁轴承径向控制的每个方向的运算值(即异步信号补偿电流运算值);进而,将磁轴承转子的一端(如径向前或径向后中的一端)一个方向(如x方向和y方向中的一个方向)的运算值,通过交叉反馈的形式输送回磁轴承径向控制的另一端(如径向前或径向后中的另一端)另一个方向(如x方向和y方向中的另一个方向)的控制回路;从而,通过提取磁轴承转子的径向每一端每个方向的实时位移信号中的异步位移信号并计算得到异步信号补偿电流运算值后,反馈至磁轴承转子的径向另一端的另一个方向的控制回路中,抵消磁轴承转子的陀螺耦合效应,使磁轴承转子稳定悬浮且高速运行。
22、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。
23、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
本文地址:https://www.jishuxx.com/zhuanli/20240929/309920.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。