一种基于边缘计算平台的车道区域标定方法和系统
- 国知局
- 2024-10-09 16:35:28
本发明涉及信息,具体涉及一种基于边缘计算平台与多尺度u型网络的车道区域标定方法和系统。
背景技术:
1、在高速公路的应急车道上,车辆随意闯入是一个常见且危险的现象,这不仅违反了交通规则,还可能导致严重的交通事故,影响紧急情况下救援车辆的通行。因此,对高速公路应急车道的监控与管理尤为重要。
2、传统车道检测方法的区域标定往往依赖于人工操作,在标准的行驶条件下可能表现良好,但在应对环境变化(如天气变化、光照条件、道路状况等)时,容易受到主观因素的影响,这一过程不仅耗时耗力增加运营成本,还会导致标定结果的不准确和不一致性。这些方法处理应急车道上车辆随意闯入的情况不及时,尤其是在高速度和高风险的环境下。
3、深度学习技术,特别是卷积神经网络(cnn),为提高车道区域标定的准确性和鲁棒性提供了新的可能,然而直接应用于高速公路应急车道的车道区域标定仍面临挑战。由于应急车道上车辆行为的随机性和环境条件的多变性,要求车道标定方法能够在不同尺度下工作,以适应快速变化的场景,同时还要保证能够实时处理和分析大量的交通数据,快速准确地识别车辆随意闯入应急车道的行为,并及时采取相应的措施,如发出警告、通知相关部门等,以保障交通安全。因此,研究一种能够适应快速变化的场景,同时具有较高车道检测的精度和鲁棒性方法,尤其是在应对高速公路应急车道等关键场景时,能够适应环境变化,确保车道标定的高准确性和可靠性。
技术实现思路
1、为了克服背景技术中存在的问题,本发明提供一种基于边缘计算平台的车道区域标定方法,其不仅能显著减少对人工操作的依赖,提高标定的效率和准确性,还具备低延迟、低网络负担和充分的自适应能力。本发明主要内容如下:
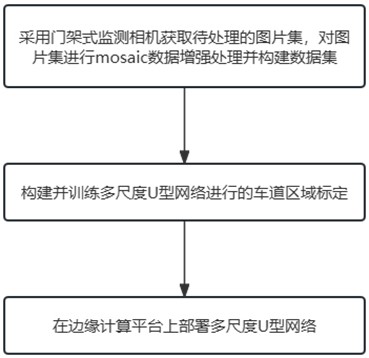
2、步骤1,获取待处理的图片集,对图片集进行mosaic数据增强处理并构建训练数据集;
3、步骤2,构建并训练多尺度u型网络进行车道区域标定;
4、所述多尺度u型网络包括编码器、解码器,以及分类器,编码器包括n个双重卷积单元和n个池化操作单元,每个双重卷积单元接着一个池化操作单元,双重卷积单元用于提取图片特征,池化操作单元用于降低数据的维度;
5、解码器包括n个复合上采样模块和n个复合拼接模块,每个复合上采样模块接着一个复合拼接模块,复合上采样模块用于对输入的特征图进行维度变换,双重卷积单元按照u-net网络的形式连接到复合拼接模块中,复合拼接模块对双重卷积单元和复合上采样模块处理后的特征图进行拼接,得到新的特征图;
6、最后通过softmax逐像素分类器得到车道线区域,包括应急车道区域、车道线区域、和车辆行驶区域这3种区域,以及这三种区域的的预测概率;
7、步骤3,在边缘计算平台上部署训练好的多尺度u型网络,实现待测图片的车道区域标定。
8、进一步的,步骤1中,采用门架式道路监测相机采集不同自然环境下实地场景视频,随后对采集的视频进行抽帧,按照一定时间间隔提取视频帧,将这些视频帧作为图片集;对图片集进行mosaic数据增强,对原有的图片先进行不同尺度的缩放处理,将缩放后的图片进行随机拼接,使得拼接后的图片满足原始图片的大小,构成训练数据集。
9、进一步的,双重卷积单元由2个卷积层组成,分别为第一卷积层和第二卷积层,两个卷积层串行运算,第一与第二卷积层的卷积核大小是,步长是1,填充是0,输出的通道数不同,第一卷积层的激活函数使用relu激活函数,第二卷积层的激活函数使用sigmoid激活函数,特征图在经过第一个卷积层时,特征图的维度减小两个维度,再经过第二卷积层时,再次减小两个维度,总的来说,特征图在经过双重卷积单元时,特征图减小4个维度。
10、进一步的,复合上采样模块包括一个双重卷积单元,以及一个上采样单元,特征图在经过复合上采样模块时,特征图的维度首先降低4个维度,然后经过上采样单元后,特征图的维度进行翻倍。
11、进一步的,复合拼接模块由自适应裁剪单元以及拼接单元构成,复合拼接模块接受两个特征图的输入,两个特征图输入到复合拼接模块后,首先经过自适应裁剪单元,该单元会比较两个特征图的大小,以较小的特征图为模板,对较大的特征图进行裁剪,以此得到两个相同大小的特征图,最后两个特征图进行拼接,得到新的特征图。
12、进一步的,多尺度u型网络的处理过程如下:
13、n个双重卷积单元输出的特征图依次为p1,p2,p3,p4...pn,输入图片在经过第一个双重卷积单元降低4个维度后得到特征图p1,特征p1经过池化操作单元后维度减半,再经过第二个双重卷积单元后,降低4个维度得到特征图p2,依次得到特征p3...pn,将第n个池化操作单元的输出的特征记为c0;
14、复合拼接模块的输入分别为上一次复合上采样模块的输出,和特征pn...p3,p2,p1,特征c0在经过复合上采样模块后,c0的维度首先降低4个维度,然后经过上采样单元后,维度翻2倍得到的特征为m1,m1从复合上采样模块输出后输入到第一个复合拼接模块,与复合拼接模块另一个输入特征pn进行自适应剪裁,然后进行拼接,输出的特征为c1,特征c1经过第二个复合上采样模块后,在第二个复合上采样模块里与特征pn-1进行拼接得到特征c2,依次得到最终需要预测的特征cn;最后通过softmax逐像素分类器得到车道线区域。
15、进一步的,采用由分类损失函数和分割损失函数构成的综合损失函数训练多尺度u型网络,其中分类损失函数为交叉熵损失函数,分割损失函数为dice损失函数。
16、进一步的,综合损失函数l的计算公式如下:
17、
18、其中,λ,β分别为分类损失函数和分割损失函数的权重,xi表示训练数据集中的第i个样本,p(xi)表示对于样本xi预测的概率,k是预设的类别总数,总共预设3个类,n是训练数据集中样本的总数,c表示预测得到的类别,如果预测正确,c=1,如果预测错误c=0,yic表示将样本目标转为二进制的编码, i代表样本编号,样本目标指的是在某张样本图片i里的3个类,三个目标分别是i1,i2,i3,将目标转化为二进制编码即为yic,ic的取值为i1,i2,i3,对于类别 1,其对应的向量为 [1, 0, 0];对于类别 2,其对应的向量为 [0, 1,0];对于类别 3,其对应的向量为 [0, 0, 1];x 和 y 分别代表对样本目标的预测掩码和实际掩码,∩代表取交集。
19、本发明还提供一种基于边缘计算平台的车道区域标定系统,包括如下单元:
20、数据处理单元,用于获取待处理的图片集,对图片集进行mosaic数据增强处理并构建训练数据集;
21、网络构建及训练单元,用于构建并训练多尺度u型网络进行车道区域标定;
22、所述多尺度u型网络包括编码器、解码器,以及分类器,编码器包括n个双重卷积单元和n个池化操作单元,每个双重卷积单元接着一个池化操作单元,双重卷积单元用于提取图片特征,池化操作单元用于降低数据的维度;
23、解码器包括n个复合上采样模块和n个复合拼接模块,每个复合上采样模块接着一个复合拼接模块,复合上采样模块用于对输入的特征图进行维度变换,双重卷积单元按照u-net网络的形式连接到复合拼接模块中,复合拼接模块对双重卷积单元和复合上采样模块处理后的特征图进行拼接,得到新的特征图;
24、最后通过softmax逐像素分类器得到车道线区域,包括应急车道区域、车道线区域、和车辆行驶区域这3种区域,以及这三种区域的的预测概率;
25、车道区域标定单元,用于在边缘计算平台上部署训练好的多尺度u型网络,实现待测图片的车道区域标定。
26、本发明的相对于现有技术具有以下有益效果:
27、多尺度u型网络通过在不同尺度上提取特征信息,提高了模型对不同尺寸车辆和复杂场景的识别能力,增强了车道区域标定的准确性和鲁棒性,尤其在光照变化、天气变化等不稳定环境下。通过在边缘计算平台上本地处理数据,可以减少向云端或数据中心传输大量原始数据的需求,从而减轻网络带宽的负担,并可能降低运营成本。
本文地址:https://www.jishuxx.com/zhuanli/20240929/313475.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。