一种多功能船舶分段装配机器人
- 国知局
- 2024-10-09 14:55:52
本发明涉及船舶装配,尤其涉及一种多功能船舶分段装配机器人。
背景技术:
1、船舶分段装配时需要对待加工区域进行除锈、焊接与喷漆的工作,目前的主要工作手段是人工作业,机器可处理板件仅占20%左右、最简单的加工部分;而人工作业环境具有角度刁钻、极度高温、含氧量低、危险高空等特点,而现有的机器焊接技术可处理板件类型少,无法在高危环境替代人工降低人工作业风险,无法在整个船舶分段装配过程中提高整体工作效率。
技术实现思路
1、本发明的目的在于提供一种能够在多环境下实现高效船舶分段装配工作的装置。
2、为达到上述目的,本发明提出一种多功能船舶分段装配机器人,包括机器人装置和机器人系统,所述机器人装置包括万向轮机械臂、电磁铁机械臂、机械足、控制机构和底盘:所述底盘上方固定安装有操作机械臂;所述底盘包括顶板、底板、底盘驱动机构和衔接端,所述顶板固定于所述底板上方且同中心轴设置;所述衔接端连接于所述顶板和所述底板之间,且围绕所述中心轴,均匀分布固定于所述顶、底板周边边缘;所述万向轮机械臂和电磁体机械臂部件围绕所述底盘,分别通过所述衔接端与所述底盘活动连接;所述衔接端内还设有传动机构,所述传动机构与所述底盘驱动机构通过传动轴传动连接;所述机械足通过所述衔接端,与所述底盘相连接;
3、所述控制机构与所述万向轮机械臂、电磁铁机械臂、操作机械臂、底盘和机械足信号连接;
4、进一步的,所述控制机构包括底盘控制板和操作臂控制板,所述底盘控制板和所述操作臂控制板分别与上位机通信连接,其中,上位机用于分析摄像头采集的原始图像,在mat l ab中实时规划最优路径以及标注出需要焊接的区域;底盘控制板设于所述底盘衔接端内的顶板和底板之间,用于接收上位机规划的最优路径信息,并根据最优路径信息,集成控制7个步进电机,从而控制机器人的移动;操作臂控制板,即为树莓派控制板,其内置于所述操作机械臂内,可实现红外测距,用于接收上位机标注的焊接区域并通过驱动操作机械臂的舵机,驱动操作机械臂进行移动。
5、所述机器人系统包括以下模块:
6、采集模块:用于采集目标区域图像,获得原始数据;
7、图像识别模块:通过在yolov8模型中引入ca注意力机制,并采用mosa ic数据增强的方式,进行目标检测,识别图像;
8、路径规划模块:通过a*搜索算法与优化dwa融合算法,训练出机器人装置移动的路径规划;
9、驱动模块:通过图像识别,驱动机械臂进行工作;通过路径规划,驱动机器人六个机械足进行移动。
10、进一步的,在yolov8模型中引入ca注意力机制的具体方法为:在yolov8中添加ca模块的代码以及在c3模块中添加ca模块的代码,并且将这两个类添加到yo l o.py中的parse_mode l函数中,从而实现ca注意力机制的引入。
11、进一步的,采用mosa ic数据增强的方式进行目标检测,从而识别图像的具体方法为:1)通过在yolov8中随机选取图片拼接基准点坐标(xc,yc)并随机选取四张图片;2)四张图片根据基准点,经过尺寸调整和比例缩放后放置在左上、右上、左下、右下位置;3)根据每张图片的尺寸变换方式,将映射关系对应到图片标签上;4)依据指定的横纵坐标,对大图进行拼接,处理超出边界的检测框坐标。
12、进一步的,通过a*搜索算法与优化dwa融合算法,训练出机器人装置移动的路径规划的方法为通过将改进的a*算法的细尺度地图上找到最优路径点,并将其提取出来作为dwa算法的局部目标点,在dwa中根据传感器信息判断全局路径上是否存在位置障碍物,若存在位置障碍物则根据当前信息重新a*规划,具体步骤包括:
13、s1:获取环境信息、障碍物信息,设置路径起点与终点;
14、s2:根据现有信息建立多尺度地图,根据障碍物占比更新代价函数;
15、s3:在粗尺度地图中进行a*规划,并将最优路径映射进细尺度地图中;
16、s4:判断该路径在细尺度地图中是否存在障碍物,若为否,则直接进行步骤s5;若为是,则在细尺度地图中再度进行a*规划,更新最优路径,然后进行s5
17、s5:用f l oyd算法优化节点,提取全局路径各个关键节点作为局部目标点;
18、s6:根据机器人当前位置更新评价函数权重系数;
19、s7:调用航向角自适应调整策略的dwa算法,在机器人行进过程中不断更新位置信息和速度信息,最终抵达目的地进行作业。
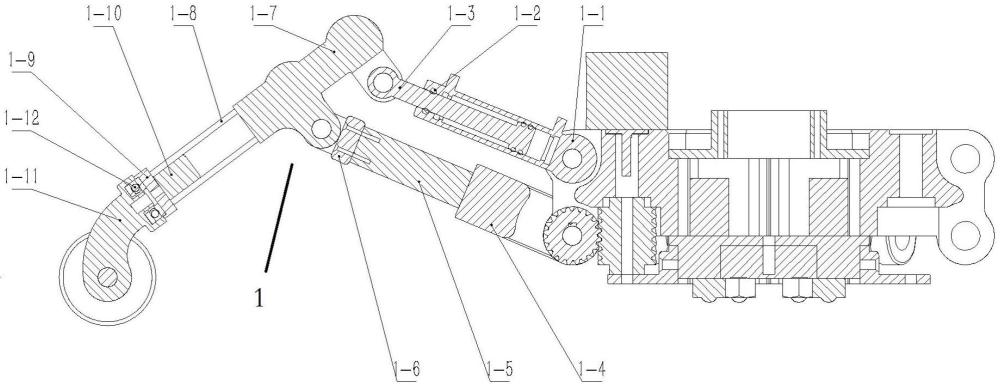
20、进一步的,所述万向轮机械臂包括第一万向臂、第二万向臂和第三万向臂,所述第三万向臂一端通过轴承架连接有万向轮,另一端分别通过第一固定架和第二固定架,与所述第一万向臂和所述第二万向臂相连接,所述第一万向臂平行设于所述第二万向臂上方;
21、所述第一万向臂为液压机构,包括万向臂液压杆和万向臂液压缸,所述万向臂液压杆一端与所述第一固定架相连接,另一端通过所述万向臂液压缸,与所述衔接端相连接;
22、所述第二万向臂由单轴液压缸组成,通过液压机构控制长度,其长度由外部连接的液压泵溢流阀等元件组合的液压箱控制;该第二万向臂的一端与所述第二固定架相连接,另一端与传动机构相连接,使得所述第二万向臂通过传动机构,与底盘驱动机构传动连接;
23、所述第三万向臂与所述轴承架的连接处设置有推力球轴承,所述推力球轴承上方通过舵机架,安装有a舵机;
24、所述第一万向臂、所述第二万向臂、所述第三万向臂和所述衔接端组成四边形连杆结构。
25、进一步的,所述电磁铁机械臂包括第一电磁臂、第二电磁臂和第三电磁臂:
26、所述第三电磁臂一端通过电磁铁架连接电磁铁,另一端设置折弯形连接翼,在所述折弯形连接翼上分别通过第一丝杆架和第二丝杆架,与所述第一电磁臂和所述第二电磁臂相连接,所述第一电磁臂平行设于所述第二电磁臂上方;
27、所述第一电磁臂包括电磁臂液压杆和电磁臂液压缸,所述电磁臂液压杆一端与所述第一丝杆架相连接,另一端通过所述电磁臂液压缸,与所述衔接端相连接;
28、所述第二电磁臂由单轴液压缸组成,通过液压机构控制长度,其长度由外部连接的液压泵溢流阀等元件组合的液压箱控制;该第二电磁臂由一端与所述第二丝杆架相连接,另一端与传动机构相连接,使得所述第二电磁臂通过传动机构,与底盘驱动机构传动连接;
29、所述第三电磁臂和所述电磁铁之间还通过舵机架,安装有b舵机,用于控制电磁铁磁吸方向;
30、所述第一电磁臂、所述第二电磁臂、所述第三电磁臂和所述衔接端构成四边形连杆结构。
31、进一步的,所述操作机械臂设于所述底盘上方,位于所述顶板上中心位置处;
32、所述操作机械臂包括操作电机、旋转体、第一操作杆和第二操作杆:所述操作电机的轴端通过轴端套筒,与所述旋转体相连接;
33、所述旋转体上方固定安装c舵机,所述c舵机与所述第一操作杆相连接;所述第一操作杆与所述第二操作杆活动连接;
34、所述第一操作杆内设置传动齿轮和d舵机,所述传动齿轮与所述第二操作杆相连接;
35、所述第二操作杆末端通过e舵机连接杆件,所述杆件通过一级f舵机连接多功能工具架,通过二级f舵机连接相机架,所述相机架内安装摄像头,所述摄像头能够将实时收集到的图像上传到云端进行处理。
36、进一步的,所述上顶板和所述下顶板构成六个相同侧面的六棱柱;所述底盘上均匀设有六个衔接端,六个衔接端分别安装于所述六棱柱的六个侧面上;所述底盘通过六个衔接端,安装有四个万向轮机械臂和两个电磁铁机械臂,所述两个电磁铁机械臂在所述底盘上相对设置,所述相对设置的两个电磁铁机械之间分别安装所述万向轮机械臂。
37、进一步的,所述底板下方周边通过丝杆,安装有托盘;所述底板下方中心位置处安装有底板电磁铁,所述底板支撑脚底端安装有四个二级电磁铁;所述底板电磁铁的作用为:在船舶分段装配体机器人在工作状态下,增强对船体的吸附力,保证机械臂有良好的工作精度;所述底盘的底板底部均匀安装有六个牛眼滚珠,用于保护底板电磁铁;所述顶板和所述底板之间还安装有底盘控制板。
38、当船舶分段装配体机器人在平地移动状态下,底板中间的底板电磁铁处于关闭状态;当船舶分段装配体机器人进入悬挂状态下,底盘中间的底板电磁铁将开启,配合电磁臂进行悬挂移动,此时底盘中间的牛眼滚珠起到保护底盘中间四个二级电磁铁的作用。
39、进一步的,所述操作电机设于操作电机架下方,并通过所述操作电机架,设于底盘顶板上的中心位置处;所述操作电机架与所述旋转体之间设有推力球轴承。
40、进一步的,所示电磁铁机械臂中,所述电磁铁置于所述电磁铁架内,并通过紧固螺母固定。
41、进一步的,所述传动机构为蜗轮蜗杆结构;所述底盘驱动机构为底盘电机,其作用为通过蜗轮蜗杆调整万向轮机械臂和电磁铁机械臂末端的位置和方向。
42、所述操作电机和所述底盘电机均为步进电机。
43、进一步的,所述蜗轮内孔设有涡轮轴,所述机械足与所述涡轮轴通过平键相固定;所述涡轮轴的轴端设有法兰,所述法兰与所述第三万向臂或第三电磁臂螺栓固定,使得所述法兰随所述第三万向臂或第三电磁臂转动。
44、进一步的,万向轮机械臂,电磁铁机械臂,机械足、顶板,连接端和衔接端部分表面都涂覆有耐高温、耐弧光的涂料防护层。
45、进一步的,所述操作机械臂中,摄像头转动安装在安装架内;所述操作机械臂上还内置有操作控制板,该操作控制板即为树莓派控制板。
46、进一步的,该摄像头为远程摄像头,其外表面固定安装有防护罩,该防护罩为透明罩。
47、本发明的使用原理为:将本发明机器人装置安置在船舶分段装配的待加工区域附近,且保持一定距离,避免影响远程摄像头的移动,远程摄像头通过导线连接外部电源启动,设置好抓拍成程序后,将f二级舵机通过导线连接电源并启动,该f二级舵机带动相机架移动,从而带动远程射摄像头巡航抓拍,抓拍后的图面信息通过无线网传输到外部数据接收设备,该外部数据接收设备即为上位机。
48、与现有技术相比,本发明的优势之处在于:
49、1、本发明通过引入ca注意力机制改进,并采用mosa i c数据增强的方式对视觉检测技术进行yolov8模型训练,设计出一款针对船舶分段装配环境的集成检测算法,提高了待加工区域检测的准确性,并使维修结果量化可视化。
50、2、本发明调用改进a*搜索算法与优化dwa融合算法,训练出针对船体分段结构内部机器人装置移动的路径规划系统,使得装配效率最大化。
51、3、本发明通过在底盘上安装四个万向轮机械臂,使用四跳机械臂搭载万向轮,具有极强的抗震减震能力,便于机器人装置能在凹凸不平的场所中顺利运作,从而提高摄像头图像采集质量。
52、4、本发明通过在底盘上安装两个电磁铁机械臂,使用两条机械臂搭载电磁铁,使得机器人装置能够通电吸附在工作区域表面,再与四个万向轮机械臂和操作机械臂相配合,提高了整体工作效率,有效跨越船舶分段区域的分隔板,实现多环境下高效运作。
本文地址:https://www.jishuxx.com/zhuanli/20241009/307004.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表