基于无人机机载单站的TDOA定位方法、系统、电子设备与介质与流程
- 国知局
- 2024-10-09 15:00:31
本发明涉及无线电监测领域,尤其涉及一种基于无人机机载单站的tdoa定位方法、系统、电子设备与介质。
背景技术:
1、在无线电通信、雷达、声纳和其他信号处理系统中,单站定位是一种重要的定位技术;单站定位是指仅使用一个接收站来确定目标信号源的位置。
2、对于单站定位,目前的一种做法是通过入射角(aoa)测量,该方法通过测量信号到达接收站的aoa信息,可以确定目标的方位。在实际应用中通常使用带有定向天线的设备(如测向天线)来测量信号的到达角度,进行粗略定位。
3、现有的另一种做法是接收信号强度测量,这是由于在信号的传输过程中,信号的强度会在传播路径中受到影响,可以基于接收信号的强度来进行信号的定位,在已知信号的传播模型的情况下(例如空间路径的损耗模型),可以将接收信号强度与已知模型下的理论强度进行比较,便能够估计出与目标的距离。但在实际应用中,基于接收信号强度测量的方法,受到多径效应等环境因素的影响很大,使定位效果下降。
4、然而,上述现有技术的做法存在定位精度不够的问题。
技术实现思路
1、本发明提供一种基于无人机机载单站的tdoa定位方法、系统、电子设备与介质,以解决现有技术中对目标信号源的定位精度不高的问题。
2、根据本发明的第一方面,提供了一种基于无人机机载单站的tdoa定位方法,利用单个无人机机载基站实现对目标信号源的定位;该方法包括:
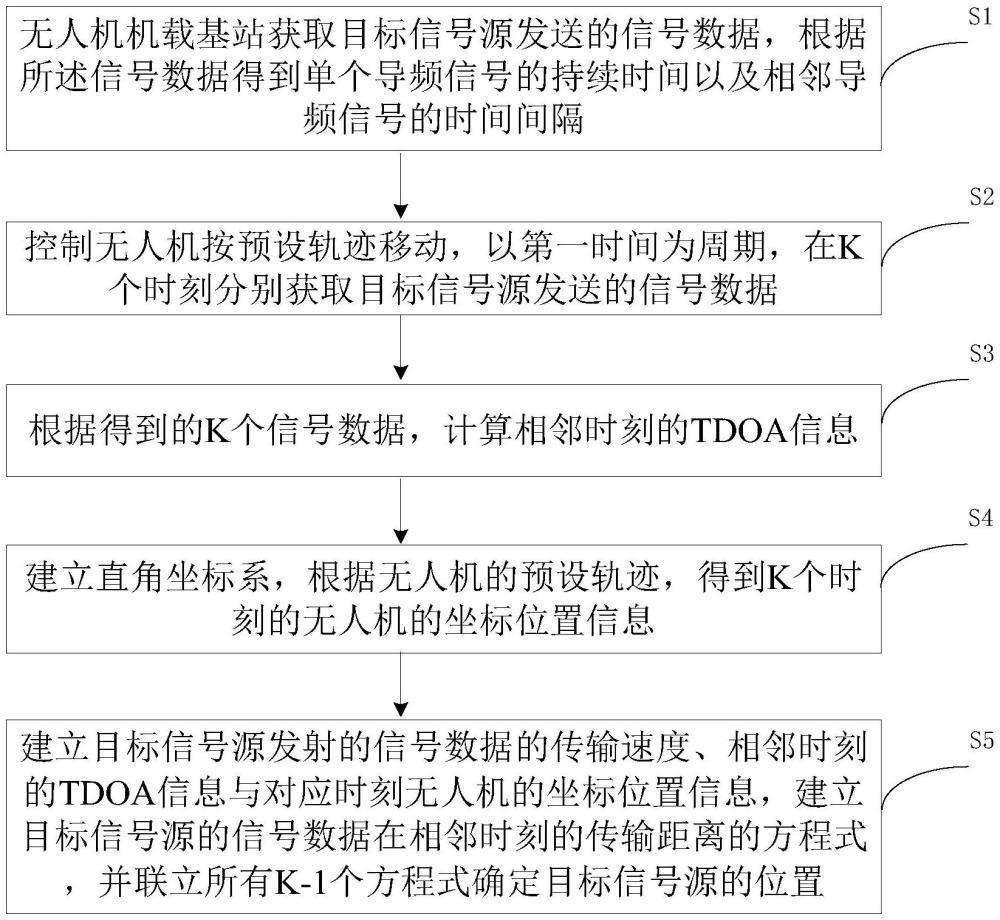
3、无人机机载基站获取目标信号源发送的信号数据,根据所述信号数据得到单个导频信号的持续时间以及相邻导频信号的时间间隔;其中每个信号数据均包括时域信号以及在时域信号前端携带的重复的导频信号;
4、控制无人机按预设轨迹移动,以第一时间为周期,在k个时刻分别获取目标信号源发送的信号数据;其中,所述第一时间与相邻两段导频信号的时间间隔相等,k为正整数,且k≥3;
5、根据得到的k个信号数据,计算相邻时刻的tdoa信息;
6、建立直角坐标系,根据无人机的预设轨迹,得到k个时刻的无人机的坐标位置信息;
7、建立目标信号源发射的信号数据的传输速度、相邻时刻的tdoa信息与对应时刻无人机的坐标位置信息,建立目标信号源的信号数据在相邻时刻的传输距离的方程式,并联立所有k-1个方程式确定目标信号源的位置。
8、可选的,所述计算相邻时刻的tdoa信息,具体包括:
9、建立无人机在不同时刻接收到的信号数据的模型,具体为:rj(t)=
10、hs(t-τj)+nj(t);其中,rj表示to+jt时刻无人机接收到的信号数据,to为无人机移动的起始时刻,t为所述第一时间,τj表示在to+jt时刻无人机位置改变引起的信道时延,nj(t)表示时域高斯白噪声,且t的取值为1毫秒以内,以使得两相邻时刻的信道增益基本不变,且两相邻时刻目标信号源的位置基本不变;其中,j为自然数,且j的取值为0,1…k-1;
11、建立无人机在相邻两时刻接收到的信号数据的关联方程,具体为:rm(t)≈rm-1(t-t-τm,m-1);其中,rm-1为to+(m-1)t时刻无人机接收到的信号数据;τm,m-1为to+mt时刻与to+(m-1)t时刻信道相对时延的实际值,且τm,m-1=τm-τm-1;
12、利用广义互相关估计出三个相邻时刻信道的相对延迟估计值τ′m,m-
13、和τ′m-1,m-2;其中,τ′m,m-1为to+mt时刻与to+(m-1)t时刻信道相对时延的估计值,τ′m-1,m-2为to+(m-1)t时刻与t0+(m-2)t时刻信道相对时延的估计值;其中,m为自然数,且令m=2,3……k-2,在移动k次后得到k-1个两相邻时刻信道的相对延迟估计值;其中两相邻时刻信道的相对延迟估计值作为对应的两相邻时刻的tdoa信息。
14、可选的,利用广义互相关估计出三个相邻时刻信道的相对延迟估计值τ′m,m-1和τ′m-1,m-2,具体包括:
15、对相邻两时刻接收到的信号数据rm(t)和rm-1(t)的频域信号rm(ω)和rm-1(ω)做互相关功率谱,其公式为:
16、rm,m-1(w)=rm(w)rm-1*(w),其中,rm,m-1(w)为互相关功率谱,(·)*代表共轭操作;
17、获得互相关功率谱rm,m-1(w)对应的gcc函数,其中gcc函数的公式为:
18、
19、找到gccm,m-1(τ)的最大值,最大值分别所对应的τ就可以被看成是τ′m,m-1;
20、利用同样的方式得到τ′m-1,m-2。
21、可选的,目标信号源的信号数据在相邻时刻的传输距离的方程式:
22、
23、其中,c是目标信号源发送的信号数据的载波的传输速度,xm和ym分别为to+mt时刻无人机在直角坐标系中x轴和y轴的坐标,xm-1和ym-1分别为to+(m-1)t时刻无人机在直角坐标系中x轴和y轴的坐标;x和y分别为目标信号源在直角坐标系中x轴和y轴的坐标。
24、可选的,联立所有k-1个方程式确定目标信号源的位置,其中k-1个方程式具体为:
25、
26、根据联立的方程式,可得到目标信号源的位置(x,y)。
27、根据本发明的第二方面,提供了一种基于无人机机载单站的tdoa定位系统,利用单个无人机机载基站实现对目标信号源的定位;该系统包括:
28、导频信息获取单元,用于根据无人机机载基站获取到的目标信号源发送的信号数据,得到单个导频信号的持续时间以及相邻导频信号的时间间隔;其中每个信号数据均包括时域信号以及在时域信号前端携带的重复的导频信号;
29、信号采集单元,用于在无人机按预设轨迹移动的情况下,以第一时间为周期,在k个时刻分别获取目标信号源发送的信号数据;其中,所述第一时间与相邻两段导频信号的时间间隔相等,k为正整数,且k≥3;
30、tdoa信息计算单元,用于根据得到的k个信号数据,计算相邻时刻的tdoa信息;
31、无人机位置信息确定单元,用于建立直角坐标系,根据无人机的预设轨迹,得到k个时刻的无人机的坐标位置信息;
32、目标信号源位置确定单元,用于建立目标信号源发射的信号数据的传输速度、相邻时刻的tdoa信息与对应时刻无人机的坐标位置信息,建立目标信号源的信号数据在相邻时刻的传输距离的方程式,并联立所有k-1个方程式确定目标信号源的位置。
33、可选的,所述tdoa信息计算单元具体包括:
34、模型建立子单元,用于建立无人机在不同时刻接收到的信号数据的模型,具体为:rj(t)=hs(t-τj)+nj(t);其中,rj表示to+jt时刻无人机接收到的信号数据,to为无人机移动的起始时刻,t为所述第一时间,τj表示在to+jt时刻无人机位置改变引起的信道时延,nj(t)表示时域高斯白噪声,且t的取值为1毫秒以内,以使得两相邻时刻的信道增益基本不变,且两相邻时刻目标信号源的位置基本不变;其中,j为自然数,且j的取值为0,1…k-1;
35、关联方程建立子单元,用于建立无人机在相邻两时刻接收到的信号数据的关联方程,具体为:rm(t)≈rm-1(t-t-τm,m-1);其中,rm-1为to+(m-1)t时刻无人机接收到的信号数据;τm,m-1为to+mt时刻与to+(m-1)t时刻信道相对时延的实际值,且τm,m-1=τm-τm-1;
36、信道相对时延估计子单元,用于利用广义互相关估计出三个相邻时刻信道的相对延迟估计值τ′m,m-1和τ′m-1,m-2;其中,τ′m,m-1为to+mt时刻与to+(m-1)t时刻信道相对时延的估计值,τ′m-1,m-2为to+(m-1)t时刻与t0+(m-2)t时刻信道相对时延的估计值;其中,m为自然数,且令m=2,3……k-2,在k个时刻后得到k-1个两相邻时刻信道的相对延迟估计值;其中两相邻时刻信道的相对延迟估计值作为对应的两相邻时刻的tdoa信息。
37、可选的,所述信道相对时延估计子单元具体包括:
38、信号转换子单元,用于对相邻两时刻接收到的信号数据的频域信号做互相关功率谱,其公式为:
39、rm,m-1(w)=rm(w)rm-1*(w),其中,rm,m-1(w)为互相关功率谱,(·)*代表共轭操作;
40、gcc函数确定子单元,用于获得互相关功率谱rm,m-1(w)对应的gcc函数,其中gcc函数的公式为:
41、
42、gcc函数最大值确定子单元,用于找到gccm,m-1(τ)的最大值,最大值分别所对应的τ就可以被看成是τ′m,m-1。
43、根据本发明的第三方面,提供了一种电子设备,包括处理器与存储器,
44、所述存储器,用于存储代码和相关数据;
45、所述处理器,用于执行所述存储器中的代码用以实现第一方面及其可选方案涉及的方法。
46、根据本发明的第四方面,提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现第一方面及其可选方案涉及的方法。
47、本发明提供的基于无人机机载单站的tdoa定位方法、系统、电子设备与介质,充分利用了无人机的位置信息和相邻导频信号的时间间隔,利用gcc估计出当前时刻和前一时刻的tdoa信息;通过控制无人机按预设轨迹移动,借助无人机在不同时刻的位置信息以及接收到的信号数据之间的相关性,基站可以获得无人机在不同时刻的tdoa信息,进而最终确定目标信号源的相对位置并实现一定时间段内的目标信号源的定位。从而实现了仅利用一个基站就实现了多基站的功能,减轻了硬件成本。并且定位精度较高,能够满足需求。
本文地址:https://www.jishuxx.com/zhuanli/20241009/307264.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表