一种多线激光雷达及自移动车辆的制作方法
- 国知局
- 2024-10-09 15:00:21
本发明实施例涉及激光雷达技术,尤其涉及一种多线激光雷达及自移动车辆。
背景技术:
1、随着激光技术的发展和应用,激光扫描技术越来越广泛地应用于测量、交通、驾驶辅助和移动机器人等领域。激光雷达是一种通过激光来探测目标的位置、速度、姿态等特征量的雷达系统,其基本原理是先向目标发射探测激光光束,然后将接收从目标反射回来的信号,通过比较发射信号与接收信号的信息,就可获得目标的距离、方位、高度、速度、姿态、甚至形状等信息。
2、目前,在不同的应用场所,对激光雷达各方面性能参数标准要求不一样,比如有的应用场所需要大的探测量程,有的应用场所需要大视场的同时做到近距离尽量无盲区等,但是这些参数标准很难同时达到。激光雷达很多因素都是相互影响的,比如大视场的激光雷达,其角分辨率就会受到约束,而高分辨率又会受到成本、体积、调试等各方面约束,导致成本高、体积大,调制方式复杂,不利于推广应用。
技术实现思路
1、本发明实施例的目的是提供一种多线激光雷达及自移动车辆,该多线激光雷达同时具有测远和补盲的功能,具有结构简单、体积小、成本低的优势。
2、第一方面,本发明实施例提供一种多线激光雷达,包括旋转棱镜、旋转机构和两组收发组件;
3、所述旋转棱镜包括至少三个侧面,至少三个侧面绕扫描旋转轴设置;其中至少两个所述侧面为反射面;所述旋转棱镜所有的反射面中,存在至少两个所述反射面与所述旋转棱镜的扫描旋转轴之间的夹角不相等;
4、所述旋转机构用于驱动所述旋转棱镜绕所述扫描旋转轴旋转;
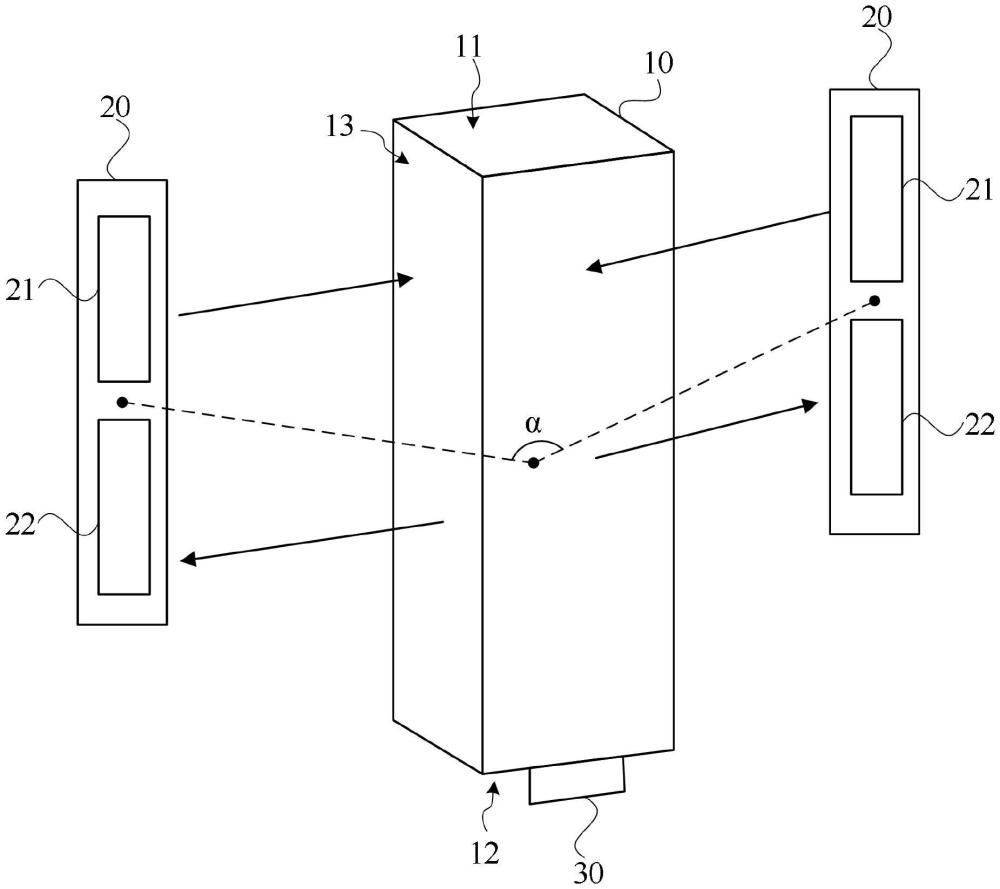
5、两组所述收发组件分别位于所述旋转棱镜两侧,且两组所述收发组件相对于所述扫描旋转轴非对称设置,两组收发组件的激光出射面之间的夹角小于180度,以在所述旋转机构驱动所述旋转棱镜绕所述扫描旋转轴转动时形成扫描视场。
6、可选的,两组所述收发组件包括第一收发组件和第二收发组件,所述第一收发组件在所述旋转棱镜旋转时形成第一扫描视场,所述第二收发组件在所述旋转棱镜旋转时形成第二扫描视场;
7、所述第一收发组件在所述第一水平扫描视场内的垂直扫描分辨率大于所述第二收发组件在所述第二水平扫描视场内的垂直扫描分辨率;
8、其中,与所述旋转棱镜的扫描旋转轴平行的方向为垂直方向。
9、可选的,每组收发组件包括至少一个激光发射单元和至少一个激光接收单元;所述激光发射单元包括多个激光器,同一所述激光发射单元中的各所述激光器出射光束存在不为零的夹角;同一个激光发射单元的多个激光器集成在同一电路板上;
10、所述激光接收单元包括多个光电探测器,每个所述光电探测器用于接收对应激光器出射,并被待测目标返回的光束;同一个激光接收单元的多个光电探测器集成在同一电路板上。
11、可选的,每组所述收发组件还包括一发射镜组和一接收镜组,所述发射镜组设置于所述激光发射单元和所述旋转棱镜之间,用于将所述激光发射单元发射的激光光束准直后照射到所述旋转棱镜的反射面上,所述接收镜组设置于所述激光接收单元和所述旋转棱镜之间,用于将所述旋转棱镜的反射面反射的激光光束汇聚后照射到所述激光接收单元上。
12、可选的,对于任一所述反射面,其与扫描旋转轴的夹角同时大于其相邻两个反射面与扫描旋转轴的夹角,或者同时小于其相邻两个反射面与扫描旋转轴的夹角。
13、可选的,所述旋转棱镜的至少一个反射面包括沿所述扫描旋转轴依次分布的至少两个反射区;每个反射区与所述扫描旋转轴的夹角不完全相同。
14、可选的,所述旋转棱镜的多个所述侧面围成空心轴;
15、所述旋转机构设置于所述旋转棱镜的空心轴内。
16、可选的,还包括编码器,所述编码器设置在所述旋转棱镜上,用于检测并输出所述旋转棱镜的角度信息和/或所述旋转机构的速度信息;和/或
17、主控板,所述旋转机构、所述编码器、所述收发组件中的所述激光发射单元和所述激光接收单元均与所述主控板连接。
18、可选的,还包括壳体和滤光罩;所述壳体和所述滤光罩形成封闭的外壳以保护所述多线激光雷达;所述滤光罩包括与两组所述收发组件的出射方向相对设置的两个滤光区。
19、第二方面,本发明实施例还提供一种自移动车辆,包括:
20、车辆本体,具有自移动模式;以及上述任意一种多线激光雷达,所述多线激光雷达设置于所述车辆本体的车头和/或车尾的两侧。
21、本发明实施例提供的多线激光雷达,包括旋转棱镜、旋转机构和两组收发组件;旋转棱镜包括至少三个侧面,至少三个侧面绕扫描旋转轴设置;其中至少两个侧面为反射面;旋转棱镜所有的反射面中,存在至少两个反射面与旋转棱镜的扫描旋转轴之间的夹角不相等;旋转机构用于驱动旋转棱镜绕扫描旋转轴旋转;两组收发组件分别位于旋转棱镜两侧,且两组收发组件相对于扫描旋转轴非对称设置,两组收发组件的激光出射面之间的夹角小于180度,以在旋转机构驱动旋转棱镜绕扫描旋转轴转动时形成扫描视场。通过设置旋转棱镜的至少两个侧面为反射面,且至少两个反射面与旋转棱镜的扫描旋转轴之间的夹角不相等,当旋转机构驱动旋转棱镜旋转时,每个反射面可以使一条光线实现水平扫描,不同反射面可以将同一条光线变为多条光线,从而增加扫描线数;通过设置两组收发组件,且两组收发组件相对于扫描旋转轴非对称设置,每组收发组件中的激光发射单元通过旋转棱镜绕扫描旋转轴转动时形成扫描视场,从而使得两组收发组件能够从不同的方位发射激光光束,并经过同一旋转棱镜的旋转扫描后投射至至少两个方位以形成相应的扫描视场,进而能够为安装了该激光雷达的自主体提供至少两个方位上的扫描探测,而无需再自主体的不同方位上分别安装一个激光雷达,具有低成本且结构简单的优点。
技术特征:1.一种多线激光雷达,其特征在于,包括旋转棱镜、旋转机构和两组收发组件;
2.根据权利要求1所述的多线激光雷达,其特征在于,两组所述收发组件包括第一收发组件和第二收发组件,所述第一收发组件在所述旋转棱镜旋转时形成第一扫描视场,所述第二收发组件在所述旋转棱镜旋转时形成第二扫描视场;
3.根据权利要求1或2所述的多线激光雷达,其特征在于,每组收发组件包括至少一个激光发射单元和至少一个激光接收单元;所述激光发射单元包括多个激光器,同一所述激光发射单元中的各所述激光器出射光束存在不为零的夹角;同一个激光发射单元的多个激光器集成在同一电路板上;
4.根据权利要求3所述的多线激光雷达,其特征在于,每组所述收发组件还包括一发射镜组和一接收镜组,所述发射镜组设置于所述激光发射单元和所述旋转棱镜之间,用于将所述激光发射单元发射的激光光束准直后照射到所述旋转棱镜的反射面上,所述接收镜组设置于所述激光接收单元和所述旋转棱镜之间,用于将所述旋转棱镜的反射面反射的激光光束汇聚后照射到所述激光接收单元上。
5.根据权利要求1所述的多线激光雷达,其特征在于,对于任一所述反射面,其与扫描旋转轴的夹角同时大于其相邻两个反射面与扫描旋转轴的夹角,或者同时小于其相邻两个反射面与扫描旋转轴的夹角。
6.根据权利要求1所述的多线激光雷达,其特征在于,所述旋转棱镜的至少一个反射面包括沿所述扫描旋转轴依次分布的至少两个反射区;每个反射区与所述扫描旋转轴的夹角不完全相同。
7.根据权利要求1、2、4、5或6所述的多线激光雷达,其特征在于,所述旋转棱镜的多个所述侧面围成空心轴;
8.根据权利要求1、2、4、5或6所述的多线激光雷达,其特征在于,还包括编码器,所述编码器设置在所述旋转棱镜上,用于检测并输出所述旋转棱镜的角度信息和/或所述旋转机构的速度信息;和/或
9.根据权利要求1、2、4、5或6所述的多线激光雷达,其特征在于,还包括壳体和滤光罩;所述壳体和所述滤光罩形成封闭的外壳以保护所述多线激光雷达;所述滤光罩包括与两组所述收发组件的出射方向相对设置的两个滤光区。
10.一种自移动车辆,其特征在于,包括:
技术总结本发明实施例公开了一种多线激光雷达及自移动车辆,该多线激光雷达包括旋转棱镜、旋转机构和两组收发组件;旋转棱镜包括至少三个侧面,至少三个侧面绕扫描旋转轴设置;其中至少两个侧面为反射面;旋转棱镜所有的反射面中,存在至少两个反射面与旋转棱镜的扫描旋转轴之间的夹角不相等;旋转机构用于驱动旋转棱镜绕扫描旋转轴旋转;两组收发组件分别位于旋转棱镜两侧,且两组所述收发组件相对于所述扫描旋转轴非对称设置,两组收发组件的激光出射面之间的夹角小于180度,以在旋转棱镜绕扫描旋转轴转动时形成扫描视场。本发明实施例提供的多线激光雷达同时具有测远和补盲的功能,具有结构简单、体积小、成本低的优势。技术研发人员:白芳,胡小波受保护的技术使用者:深圳市镭神智能系统有限公司技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/307253.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表